机器人移动的规划和导航
现在,假如有一个机器人,它已经存储好一个全局的地图(哪里可通行,哪里不可通行),并且知道自己在其中的位置。现在要从给定的起点走到终点,我们应该怎么做?
有轨导航和无轨导航
在某些应用场景中,例如工厂或仓库,环境相对固定且对路径的准确性要求较高。这种情况下,我们可以使用有轨导航系统,比如通过在地面上铺设磁条或粘贴二维码等方式进行人工标识。机器人通过读取这些标识来确定自己的位置和导航路线。这种方法的优点是导航精度高,重复性好,适用于需要高度结构化环境中的重复工作。然而,它的缺点也很明显,包括安装成本高、环境改变后需要重新布置标识、灵活性较差。
或者,另一种选择是使用半有轨导航,这种方式不依赖于物理导轨,但会保留路线上的标识,如地面上的条形码。机器人则通过发射激光或使用视觉系统读取这些标识。这种方式结合了有轨导航的精确性和某些无轨导航的灵活性。其优点包括在有限的环境改动下仍能保持较好的导航效果,而缺点是仍然依赖于环境中的某些固定标识,且在标识被遮挡或损坏时容易出现导航错误。
更加通用且灵活的方式是无轨导航,机器人完全依靠自身装备的传感器(如激光、视觉或超声波)进行环境的地图构建和自我定位。这种方法使得机器人能在没有任何预设标记的环境中自由移动,非常适用于不断变化的环境如家庭或办公场所。机器人通过连续地扫描周围环境,并与内部地图进行匹配,来识别自己的位置和导航路线。这种方法的优点是极高的灵活性和适应性,但需要机器人自己的本事,挑战在于需要复杂的算法来处理环境数据,计算成本高。所以需要我们为机器人设计算法,这也是本文的主要内容。
路径规划
现在,我们要根据起点,终点和地图信息,规划出来一条路径。
首先嘛简单起见,我们假设地图只分为可通行和不可通行,并且把机器人视作质点(也就是忽略运动学和几何的约束,若要考虑机器人半径,可以把障碍物向外扩充来进行等效,这不是本文的重点)。
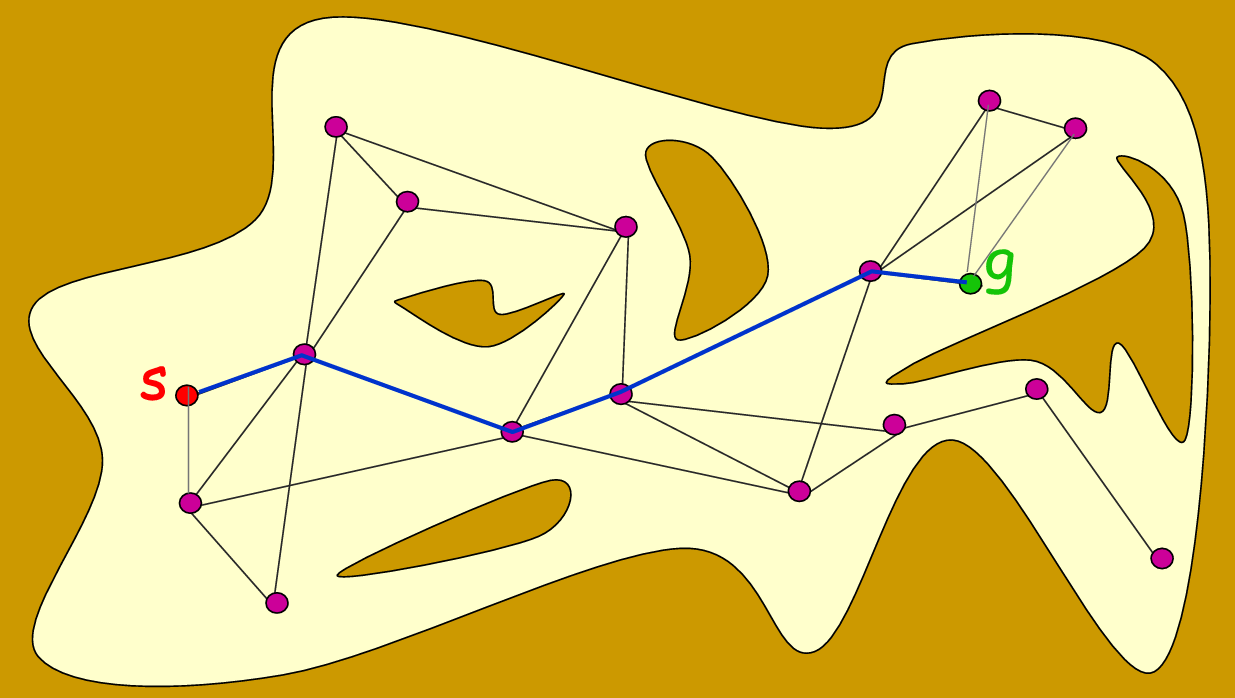
行车图 (Roadmap)
行车图法是路径规划中常用的一种技术,旨在创建一个简化的图,这个图反映了从起点到终点的可能路径。
可视图(Visibility Graph)是一种典型的行车图。我们连接起点,终点和所有障碍物顶点形成的边(去掉会穿过障碍物的),实际上就得到了一张图,在此图上运行搜索或者最短路算法就可以得到路径。其简单且路径长度优,扩充障碍边缘可以避免过于靠近障碍物。但是,对于边界不规则或非多边形的障碍物,这种方法可能不够精确或效率不高。

沃罗诺伊图(Voronoi Diagram)则提供了一种完全不同的方法。在此方法中,地图中的每个点被分配给最近的障碍物。对于那些与多个障碍物距离相等的点,它们构成了沃罗诺伊图的边界,这些边界理论上表示了远离任何障碍物的“最安全”的路径。通过连接这些边界点,形成了一张反映机器人应该行进的路径图。
沃罗诺伊图的优点在于它倾向于避免靠近障碍物,这在某些应用中非常有用,比如在拥挤的环境中。缺点是,由于这些路径可能绕过障碍物较远,所以行进的总距离可能比可视图法得到的路径长。此外,沃罗诺伊图的计算成本也相对较高,尤其是在障碍物多或者空间大的环境中。

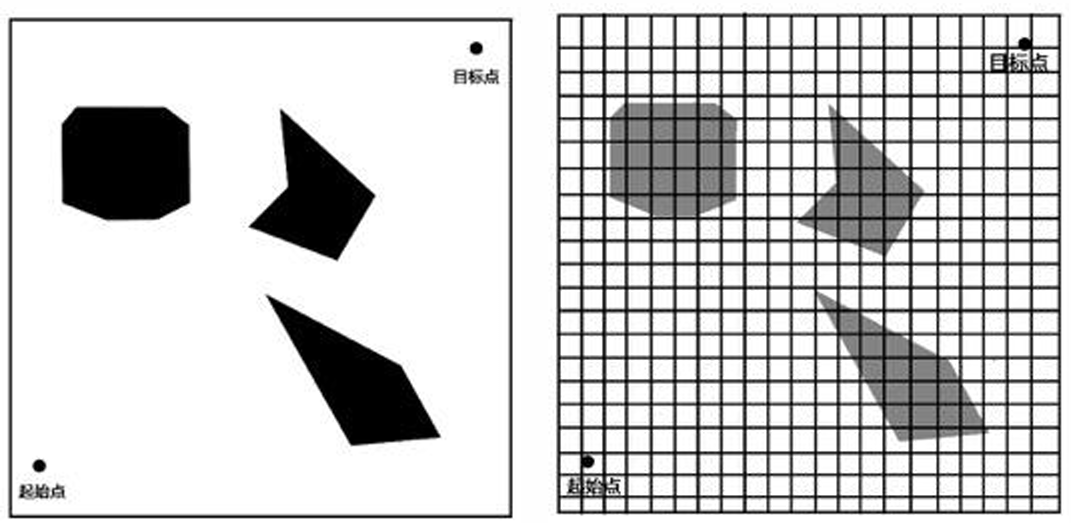
单元分解
单元分解是一种完全不同的方案。它将空间中的分为若干的小区域,每一个区域作为一个单元,以单元为顶点、以单元之间的相邻关系为边构成一张连通图。
如果环境较为简单,可以通过精确的方法如扫描线进行空间划分。这种方法将每个障碍物精确地映射到单元中,保证了划分的精确性。如左图所示,可以明显看到环境被划分为多个清晰的单元,每个单元都精确对应环境中的可通行或不可通行区域。
这种方法的优点是精度高、执行效率好,适合于障碍物较少且布局简单的环境。然而,它的主要缺点是难以适应复杂多变的环境。在障碍物数量多或形状复杂的场景中,精确的单元划分可能导致计算量大增,降低了算法的执行效率。
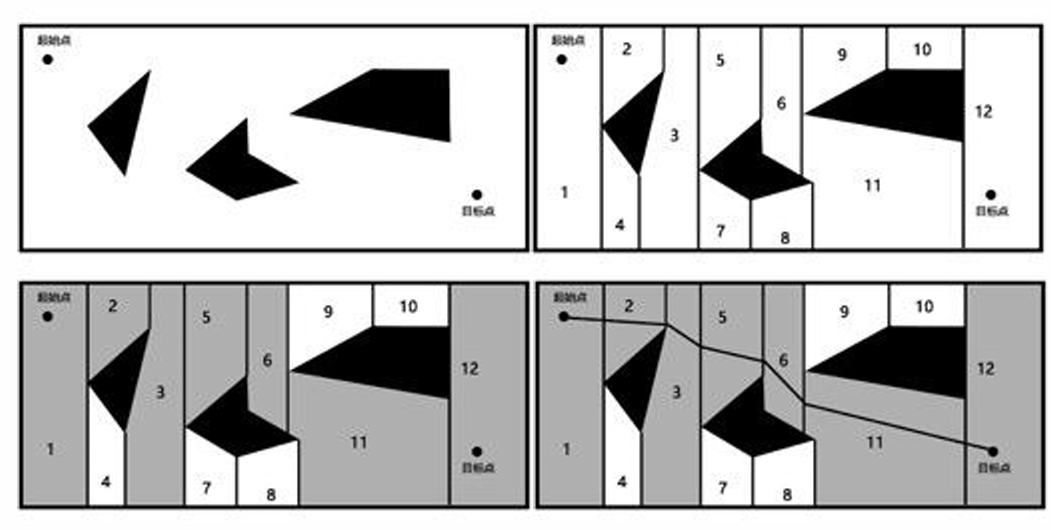
更通用的方法是使用栅格地图进行近似分解,如右图所示。在这种方法中,整个环境被划分为规则的格子,每个格子代表一个单元。栅格地图通过覆盖整个环境的网格来近似表示障碍物和可通行区域。
栅格化单元分解的优点包括易于实现和适用于多种类型的环境。这种方法简化了计算过程,使其更加适合动态或复杂的环境。然而,它的缺点也很明显:分辨率依赖于格子的大小,较大的格子可能导致路径规划不够精确,而较小的格子则可能使计算成本急剧增加。此外,近似表示可能导致路径规划不够最优,例如在细长障碍物旁边可能不会生成最短路径。
势场法
假设地图是一个力场,目标点对机器人产生吸引力,障碍物对机器人产生排斥力,那么最终力的方向不就是行走的方向吗?这一次,我们不构建图,而是构建一个指示机器人行走的势场。势场中目标点对机器人产生吸引力,障碍物对机器人产生排斥力,所有力的合成决定机器人的合力大小和方向。当然具体怎么构建有多种方案,这里讲述一种构建函数。
目标的吸引公式可以这样设定:
其中,\(r\) 是机器人到目标点的距离,\(k_{\text{attr}}\) 是自己设定的吸引力系数,\(d_{\text{max}}\) 是阈值距离。当距离小于阈值 \(d_{\text{max}}\) 时,吸引力与距离的平方成正比;当距离大于阈值时,吸引力与距离成线性关系。这样设置可以在机器人远离目标点时减小吸引力,避免过冲。
障碍物的排斥公式可以这样设定:
其中,\(r\) 是机器人到最近障碍物的距离,\(k_{\text{repel}}\) 是自己设定的排斥力系数,\(d_{\text{repel}}\) 是排斥力作用的最大距离。当机器人靠近障碍物到一定距离内时,排斥力显著增加;当超出这个距离时,排斥力消失。
对势场求梯度得到力,机器人在任何位置上的总力由所有吸引力和排斥力的向量合成得到。总力的方向指示了机器人的行进方向,力的大小也可以使用,用来调节机器人的速度或者加速度什么的。通过对势场求梯度,我们可以得到每个位置上的力向量。所以这不仅是一种离线路径规划方法,所构建的势场也构成了机器人的控制律,能够作为在线实时避障算法
这种方法的优点是操作直观且可根据环境动态调整;缺点则包括在某些复杂环境中可能会遇到局部最小值问题,导致机器人陷入无法达到目标的状态。为了解决这一问题,可以结合其他导航策略,如路径平滑或动态重规划。
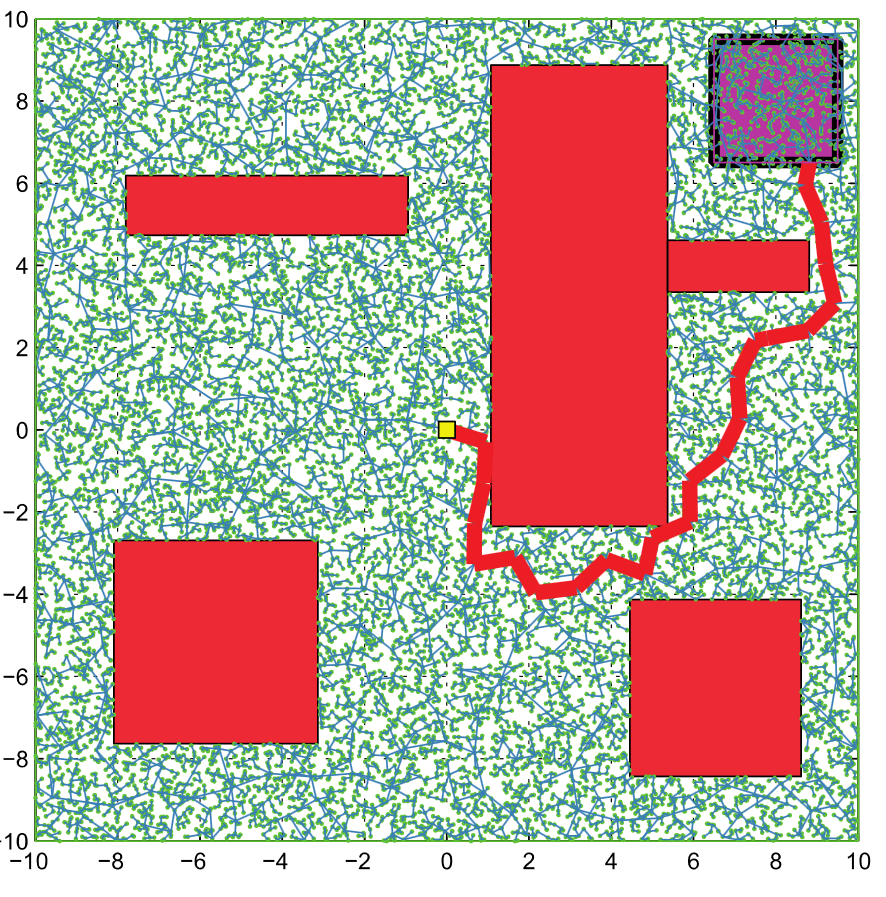
概率行车图(Probabilistic Roadmap, PRM)
我们开可以基于采样,带一点随机来规划路径。概率行车图(PRM)是一种基于采样的路径规划算法,广泛用于处理高维自由位形空间中的导航问题。这种方法适用于复杂环境中的路径规划,尤其是在机器人和其他自动化系统中非常有效。以下是流程
- 随机采样:从自由位形空间中随机采样多个点。这些点代表机器人可能占据的位置。
- 碰撞检测:对每个采样点进行碰撞检测,以确保这些点不与环境中的障碍物重叠。
- 局部路径规划:对于每对采样点,如果它们之间可以通过不与障碍物相交的直线或曲线相连,则在这两点之间创建一条边。
- 构建图:使用步骤3中的边和步骤2中的有效采样点构建一个图。
- 图搜索:使用图搜索算法(如A*或Dijkstra)在图中找到从起点到终点的最短路径。
其优点是明显的简单好算,并且由于采样的随机性和独立性,PRM特别适用于高维度问题,能有效处理多自由度机器人的路径规划。不过其计算质量明显很依赖采样,采样点太少可能无法完全表达自由空间的连通性,而有些时候我们也无法确定是不是充分采样了。
快速随机探索树(Rapidly-exploring Random Tree, RRT)
快速随机探索树(RRT)是一种有效的路径规划算法,特别适用于处理具有复杂障碍物和高自由度机器人的空间。RRT不仅在机器人领域得到广泛应用,也适用于其他多维度空间的探索任务。这种算法通过快速并随机地增长搜索树来探索空间,从而找到从起点到终点的路径。
RRT算法的基本流程:
-
初始化:创建根节点,其位置为起点。
-
迭代增长:
- 随机采样:在自由空间内随机选择一个点作为目标点(称为随机采样点)。
- 选择最近节点:在当前树中找到距离随机采样点最近的节点。
- 扩展节点:从最近节点向随机采样点方向扩展一定步长,创建新节点。这一步涉及到移动距离的限制,以确保控制在安全范围内。
- 碰撞检测:检查新节点到最近节点之间的路径是否与障碍物冲突。如果无碰撞,则将新节点添加到树中。
-
检查终点:如果新节点与终点的距离小于预设的阈值,则认为找到了路径。
-
循环迭代:重复步骤2,直到达到终点或达到最大迭代次数。
特点和优势:
- 高效探索:RRT通过不断向未探索区域扩展来高效地覆盖空间。
- 适用于复杂环境:RRT能够有效处理复杂的障碍布局和高维度问题。
- 灵活性:算法可以容易地适应不同的环境和需求,例如通过修改步长或增长策略来优化性能。
RRT是一种非常强大的工具,尤其适合在未知或动态变化的环境中进行快速路径规划。不过它同样是一个需要脸的算法。算法的性能受随机采样的影响,有时可能需要较长时间才能找到解,特别是在目标区域较小或障碍物较多的情况下。双向搜索是一种提升效率的好办法,通过同时从起点和终点搜索,可以显著减少达到目标所需的总迭代次数。这是因为两个方向的搜索可以覆盖空间的不同区域,使得搜索树更快地接近对方。
RRT 算法显然只能找到可行路径,明显不是最优路径。RRT* 可以对此做出改进。具体来说:
- 在添加新采样点之前,我们未必要将其连接到原来的“最近节点”上,可以再一定半径内自行搜索,连接到一个最短的节点。
- 添加新点之后,可以遍历一定范围内的其他节点,若其他节点连接到自己更优,则更新树

 浙公网安备 33010602011771号
浙公网安备 33010602011771号