12.30-01.08文献阅读总结
 论文研读(一)
论文研读(一)
本周是论文研读第一周,可是一篇都没有仔细读完,怎样才算仔细研读呢,心里的标准是这样的:
1、从一定程度上区分筛选出好论文;
2、对作者及研究机构分析,在大实验的官网挖掘科研信息;
3、读引言找出经典的文献;
4、研读,总结其方法;
5、展望,评估;
这周有点水了,加班加班加班,但不记录的话,就没有开始了,现在将之总结如下。关键词是"机器人""CPG"和"RL",搜到的第一篇文献是Guillaume Bellegarda和Auke Ijspeert的——《CPG-RL: Learning Central Pattern Generators for Quadruped Locomotion》,发表在期刊IEEE Robotics and Automation Letters(RAL)上,RAL的质量大于IROS, ICRA平均水准,当前影响因子4.321。Auke Ijspeert教授在先前介绍过,这里不再赘述,希望有机会,再认真研究分析学习一下其实验室。
直观扫下来,没有表面上太吸引人的点,接着便又查了一些,CPG还是落寞了一些,但我总觉得目前的应用只是停留在表面,国内深究着甚少,需要生理学的更多的支持。上面的文章让我看到另一种希望,是RL,第二篇文献是《Rapid Locomotion via Reinforcement Learning》,作者是MIT Improbable AI Lab的Gabriel Margolis,作者有自己的github主页,碰到这样的作者,总是很开心,省去了自己搜集其文献的时间。列之于下,以示尊重,下周的阅读重点:
(1)Reinforcement Learning for Quadrupedal Dribbling in the Wild;(CoRL Workshop on Sim-to-Real Robot Learning: Locomotion and Beyond, 2022)
(2)Walk These Ways: Tuning Robot Control for Generalization with Multiplicity of Behavior;(Conference on Robot Learning, 2022)
(3)Rapid Locomotion via Reinforcement Learning;(Robotics: Science and Systems, 2022)
(4)Learning to Jump from Pixels;(Conference on Robot Learning, 2021)
(5)Learning Robust Terrain-Aware Locomotion;(Master's Thesis, 2021)
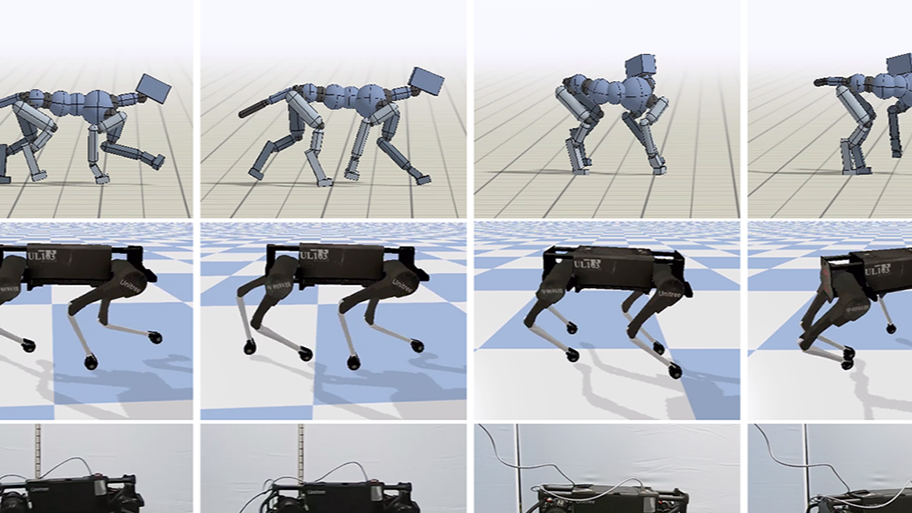
第三篇文献是《Creating a Dynamic Quadrupedal Robotic Goalkeeper with Reinforcement Learning》文章提出了一个强化学习(RL)框架,可以实现四足动物机器人在现实世界中执行足球守门员任务。这也有一系列的文章好像,印象中有一篇三年前的,觉得非常有意思——《Learning Agile Robotic Locomotion Skills by Imitating Animals》,算是一个总结和接下来的阅读指导,这周先到这里,下周继续!

