


依照<ROS-3 : Catkin工作空间和ROS功能包>,创建catkin工作空间,并在起src下创建功能包ros_demo_pkg,依赖项为roscpp、std_msgs、actionlib、actionlib_msgs,并构建该空功能包。ROS中节点间的基本通讯方式是topic,即publish/subscribe模式。以下介绍如何创建两个两个节点分别发布和订阅一个主题。
一、创建节点
1、创建发布者节点topic_publisher
首先在功能包ros_demo_pkg下的src下创建第一个节点文件topic_publisher.cpp。该节点在主题/numbers上发布一个整数,其代码和详解如下:
1 //roscpp client APIs的核心头文件
2 #include "ros/ros.h"
3 //标准消息类型Int32的头文件
4 #include "std_msgs/Int32.h"
5 #include <iostream>
6
7 int main(int argc, char **argv)
8
9 {
10
11 //初始化ROS node--topic_publisher
12 ros::init(argc, argv,"topic_publisher");
13
14 //创建一个节点句柄对象,用于和ROS系统通讯
15 ros::NodeHandle node_obj;
16
17 //创建一个主题发布者对象,设定主题名、消息类型和缓冲区大小
18 ros::Publisher number_publisher = node_obj.advertise<std_msgs::Int32>("/numbers",10);
19
20 //设定发送数据的频率
21 ros::Rate loop_rate(10);
22
23 int number_count = 0;
24
25 //开启while循环,递增一个数值,并发布到topic /numbers
26 while (ros::ok())
27 {
28
29 //创建 Int32型消息对象
30 std_msgs::Int32 msg;
31
32 //设置消息值
33 msg.data = number_count;
34
35 //打印消息数据
36 ROS_INFO("%d",msg.data);
37
38 //将消息发布到主题
39 number_publisher.publish(msg);
40
41 //读取并更新所有的topics
42 ros::spinOnce();
43
44 //实现数据发布频率
45 loop_rate.sleep();
46
47 ++number_count;
48 }
49
50 return 0;
51 }
2、创建订阅者节点topic_subscriber
接下来在功能包ros_demo_pkg下的src下创建第二个节点文件topic_subscriber.cpp。该节点订阅主题/numbers,接收该主题的消息,其代码和详解如下:
1 #include "ros/ros.h"
2 #include "std_msgs/Int32.h"
3 #include <iostream>
4
5 //Callback 函数,当有数据被发布到主题/numbers时会调用该函数
6 void number_callback(const std_msgs::Int32::ConstPtr& msg)
7 {
8 ROS_INFO("Recieved [%d]",msg->data);
9 }
10
11 int main(int argc, char **argv)
12 {
13
14 //初始化ROS node --topic_subscriber
15 ros::init(argc, argv,"topic_subscriber");
16 ros::NodeHandle node_obj;
17 //创建一个订阅者对象,设定主题名、缓冲区大小和callback函数
18 ros::Subscriber number_subscriber = node_obj.subscribe("/numbers",10,number_callback);
19 //Spinning the node
20 ros::spin();
21 return 0;
22 }
3、构建节点
为编译并构建上述节点的源代码,必须编辑功能包中的CMakeLists.txt文件。
$ cd ~/catkin_ws/src/ros_demo_pkg
$ gedit CMakeList.txt
在已有的CMakeLists.txt文件中加入以下代码:
## 指定头文件的位置
include_directories(
include
${catkin_INCLUDE_DIRS}
)
## 声明一个C++可执行文件
## add_executable(node_name src/node_source_file.cpp)
add_executable(topic_publisher src/topic_publisher.cpp)
add_executable(topic_subscriber src/topic_subscriber.cpp)
## 添加可执行文件所需的cmake target dependencies
## add_dependencies(node_name {package_name}_generate_messages_cpp)
add_dependencies(topic_publisher ros_demo_pkg_generate_messages_cpp)
add_dependencies(topic_subscriber ros_demo_pkg_generate_messages_cpp)
## 指定链接 a library 或 executable target所需的libraries
# target_link_libraries(node_name ${catkin_LIBRARIES} )
target_link_libraries(demo_topic_publisher ${catkin_LIBRARIES})
target_link_libraries(demo_topic_subscriber ${catkin_LIBRARIES})
然后就可以编译上述节点并构建该功能包:切换到catkin工作空间再进行构建。
$ cd ~/catkin_ws
$ catkin_make

以上即为构建成功。
综上,创建ROS节点包括以下几个步骤:
- 在功能包的src下编写节点的源文件,即.cpp文件
- 编辑功能包的CMakeLists.txt文件,添加编译和构建节点所需的内容;
- 构建功能包。
二、执行节点
ROS系统中运行任何节点前都必须先运行roscore。roscore将启动ROS Master、ROS paramter和rosout logging nodes。
$ roscore
再在另两个终端中分别运行上述两个节点。先运行发布者节点topic_publisher:
$ rosrun ros_demo_pkg topic_publisher
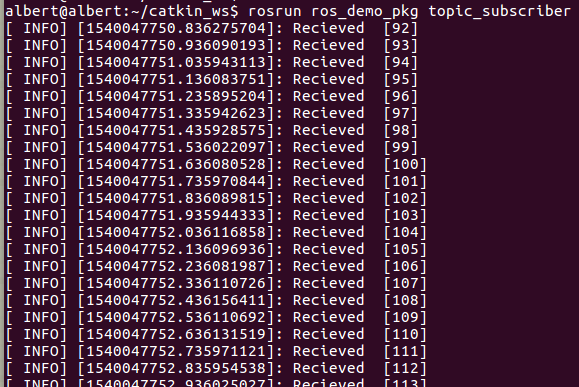
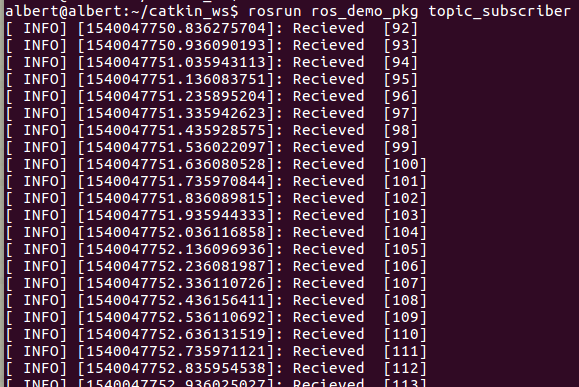
再运行订阅者节点topic_subscriber:
$ rosrun ros_demo_pkg topic_subscriber
可看到两个节点的运行结果如下图:
综上,运行以topic模式通讯的节点的过程如下:
- 在一个终端上运行roscore;
- 在另一个终端上运行主题发布者节点;
- 在另一个终端上运行主题订阅者节点。
在终端中输入rqt_graph,可看到上述两个节点间的通讯关系:
$ rqt_graph


