

在Ubuntu20.04下安装ROS
一、安装虚拟机
将Ubuntu安装在虚拟机上,因此首先需要安装虚拟机,下载官网如下,对虚拟机安装本文不做详细介绍,
官网下载:Download VMware Workstation Pro
二、安装Ubuntu20.04
三、安装ROS
1.1 换源
通常使用国外的镜像下载受网络的影响较大且速度慢,因此,使用国内镜像下载会快很多,下面给出了常用的源地址:
清华源:https://pypi.tuna.tsinghua.edu.cn/simple/
阿里云:https://mirrors.aliyun.com/pypi/simple
中科大:https://pypi.mirrors.ustc.edu.cn/simple/
这里我以 Ubuntu 20.04LTS 为例来配置 清华源
1.2 开始配置
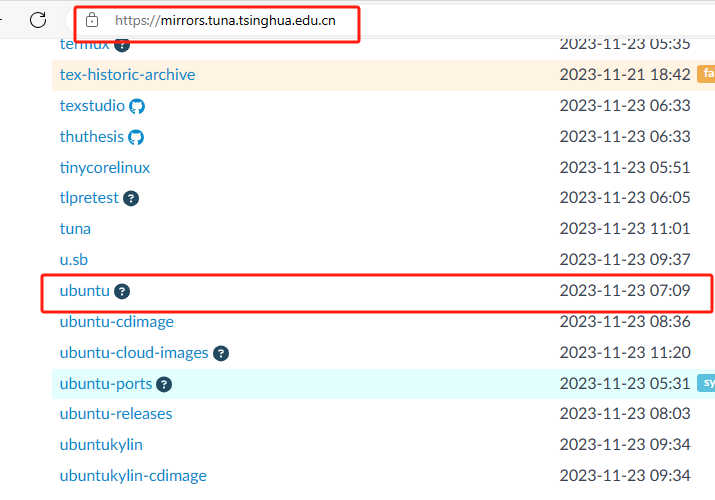
首先进入清华大学开源软件镜像站(https://mirrors.tuna.tsinghua.edu.cn),在列表里选择自己的系统,这里我选择的是 Ubuntu,点击后面的问号图案,如下图红色框所示:
然后选择20.04LTS
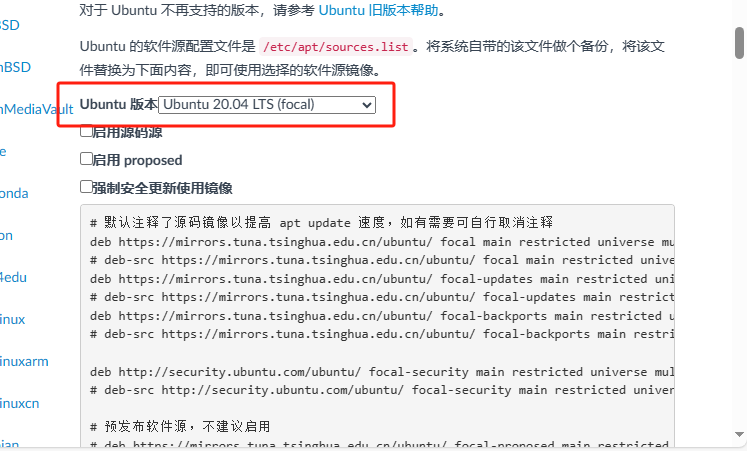
随即文本框中会生成你需要的 sources.list 文件内容,打开 Ubuntu 的终端,输入下面的命令:
sudo apt update
#将sources.list 拷贝到桌面
cp/etc/apt/sources.list ~/Desktop
# 打开 sources.list 进行编辑
sudo gedit /etc/apt/sources.list
打开文件后,将里面的所有内容替换为之前网页文本框里面的内容,例如:
然后保存关闭,这样清华源就配置好了!
1.3 安装ROS
Ros是一个适用于机器人的开源的元OS,其实ros并不是一个真正的OS,其底层是任务调度、编译、寻址等任务还是有LinuxOS完成,所以,ROS实际上是运行在Linux上的次级操作系统。但是ROS提供了操作系统应用的各种服务(eg:硬件抽象、底层设备控制、常用的函数实现、进程间消息传递、软件包管理等),也提供了用于获取、编译、跨平台运行代码的工具和函数。ROS主要采用松耦合点对点进行进程网络通信,目前主要还是支持Ubuntu系统。
(1)开始安装:配置公钥
在前面的操作中,我们已经为完成了国内源的配置,这将会让我们后面的install 一路畅通。不过还需要再做一个准备,那就是配置公钥。
公钥是 Ubuntu 系统的一种安全机制,配置公钥让系统信任。
(2) 系统更新
更新系统,确保自己的Debian软件包和索引是最新的。
(3)安装ROS
特别提醒注意 Ubuntu 版本,我的是 20.04 对应的是 ROS 版本是 noetic,大家也可以根据自己的 Ubuntu 版本去百度自己的对应的 ROS 版本
(4)测试ROS
初始化rosdep,看是否安装成功
可能会报错,错误通常是Time out,可以参考这个博客https://zhuanlan.zhihu.com/p/398754989
(5)环境变量设置
这里容易出差,直接粘贴在终端输入:
运行让环境变量生效:
(6)安装工具包:
安装 rosinstall 和 roslaunch
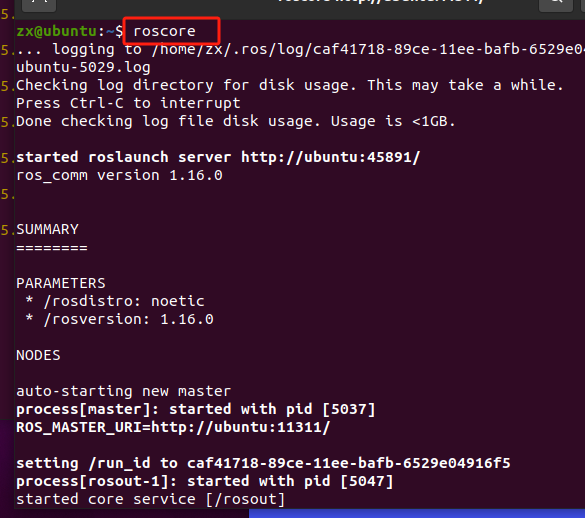
(7)测试ROS是否安装成功,终端输入
出现以下画面表示安装成功:
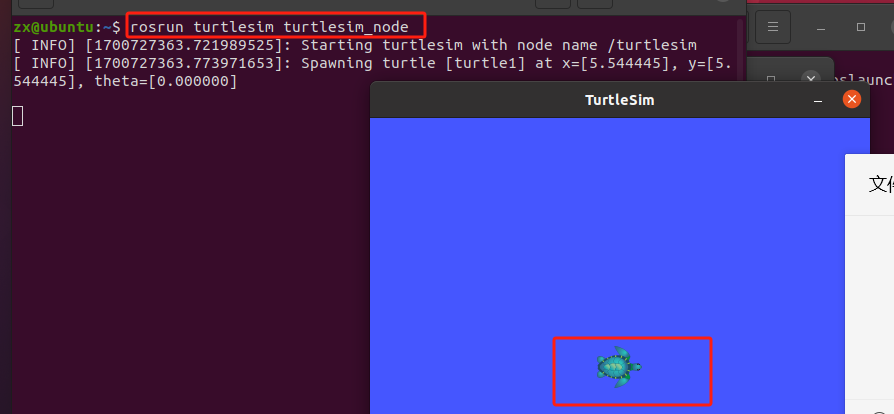
(8)另外打开一个终端,输入:
rosrun turtlesim turtlesim_node
会得如下图所示的结果,此时小乌龟是静止状态的,接下来继续后续操作,
再打开一个终端窗口,输入:
rosrun turtlesim turtle_teleop_key
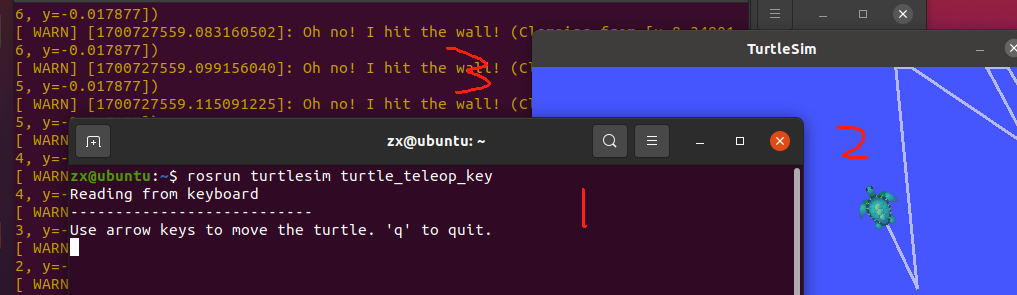
“1”表示执行窗口,使用鼠标聚焦在第三个终端窗口,通过按下键盘上↑ ↓ ← →对小乌龟运动路线进行控制,结果如“2”所示;“3”小乌龟运行得到的坐标。这样就表示ROS安装成功了。
建议参考博客:
Ubuntu20.04安装ros_ubuntu20.04 安装ros-CSDN博客
【ROS】在 Ubuntu 20.04 安装 ROS 的详细教程_ubuntu20.04安装ros-CSDN博客
Ubuntu20.04安装ros_ubuntu20.04 安装ros-CSDN博客


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律