

更改软件源
-
x64架构直接换
-
jetson nano换成国内源(由于软件那不能直接换)
-
备份原本的源,更改source.list文件的名字
#为防止误操作后无法恢复,先备份原文件sources.list sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak -
将源文件替换为如下:
# 打开源文件source.list sudo gedit /etc/apt/sources.listdeb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universe deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main multiverse restricted universe deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main multiverse restricted universe deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main multiverse restricted universe deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universe deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main multiverse restricted universe deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main multiverse restricted universe deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main multiverse restricted universe -
保存然后
sudo apt-get update
-
保存终端内容到日志
-
终端执行
$ sudo script screen.log -
停止并保存
$ exit
鼠标指针大小设置
gsettings set org.gnome.desktop.interface cursor-size 40
网速、CPU显示
- 添加源
sudo add-apt-repository ppa:fossfreedom/indicator-sysmonitor - 更新源
sudo apt-get update - 安装sysmonitior
sudo apt-get install indicator-sysmonitor - 终端执行:
indicator-sysmonitor &
然后Ctrl+C就可以实现后台运行indicator-sysmonitor - 为程序添加开机启动!鼠标右键点击标题栏上图标,弹出菜单,选择首选项
- 首选项中可以添加显示网速
更改字体倍数gnome-tweak
录屏软件
sudo apt install simplescreenrecorder
卸载火狐浏览器
- 查看firefox相关包
dpkg --get-selections |grep firefox - 卸载上述指令中的包
sudo apt-get purge packages
vscode安装
- 插件:C/C++、python、ros、cmake tool、code runer
- 设置:字体:
代码格式化:设置-文本编辑器-格式化-edit on type
升级cmake
- 查看当前版本:
cmake --version - 安装依赖
sudo apt install libssl-dev - 下载源码:
https://cmake.org/download/ - 解压缩并进入文件夹:
tar -xf cmake-3.22.4.tar.gz
cd cmake-3.22.4 - 编译安装:
./bootstrap
make
sudo make install
source ~/.bashrc - 再次查看当前版本:
cmake --version
截屏软件flameshot
安装:sudo apt-get install flameshot
使用:
-
命令行:flameshot gui
-
快捷键:打开设置-设备-键盘,拉到底部+
按如下配置:
将关闭、最大化、最小化放左边
gsettings set org.gnome.desktop.wm.preferences button-layout "maximize,minimize,close:"
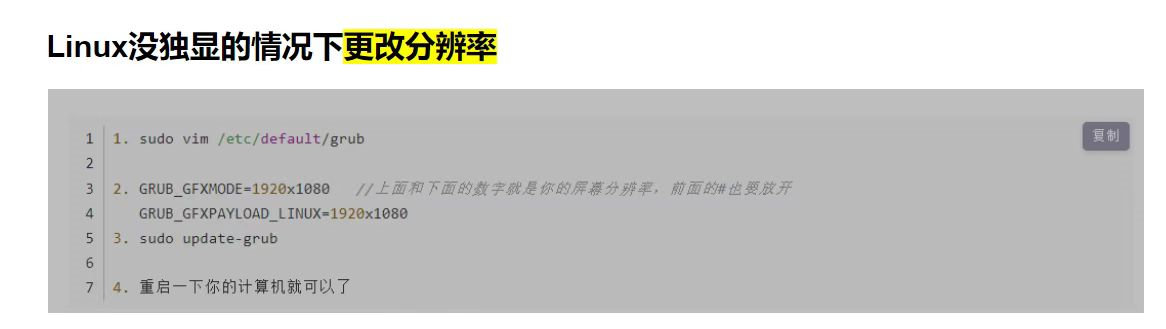
Linux没独显的情况下更改分辨率
git clone 问题
fatal: unable to access 'https://github.com/.../.git': Could not resolve host: github.com
命令行执行:
git config --global --unset http.proxy
git config --global --unset https.proxy
升级python到3.8
1. sudo add-apt-repository ppa:jonathonf/python-3.8
2. sudo apt-get update
sudo apt-get install python3.8
3. sudo update-alternatives --install /usr/bin/python3 python3 /usr/bin/python3.6 1
sudo update-alternatives --install /usr/bin/python3 python3 /usr/bin/python3.8 2
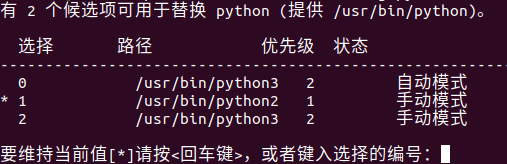
4. sudo update-alternatives --config python3
选择2
5. 一般还要升级pip
python3 -m pip install --upgrade pip
另外的方法可以参考 https://cn.linux-console.net/?p=12063
切换python默认版本
假设我的系统上有2.7.17和Python 3.6.9两个版本。现在想切换默认版本为2.7.17
- 输入以下命令查看可切换的版本
update-alternatives --list python
输出
/usr/bin/python2
/usr/bin/python3
- 配置版本
sudo update-alternatives --config python
选择1,则切换到了2.7.17版本
工控机配置虚拟屏
- 安装软件:
sudo apt-get install xserver-xorg-core-hwe-18.04
sudo apt-get install xserver-xorg-video-dummy
- 配置文件:
sudo vim /usr/share/X11/xorg.conf.d/xorg.conf
添加以下内容
Section "Monitor"
Identifier "Monitor0"
HorizSync 28.0-80.0
VertRefresh 48.0-75.0
# https://arachnoid.com/modelines/
# 1920x1080 @ 60.00 Hz (GTF) hsync: 67.08 kHz; pclk: 172.80 MHz
Modeline "1920x1080_60.00" 172.80 1920 2040 2248 2576 1080 1081 1084 1118 -HSync +Vsync
EndSection
Section "Device"
Identifier "Card0"
Driver "dummy"
VideoRam 256000
EndSection
Section "Screen"
DefaultDepth 24
Identifier "Screen0"
Device "Card0"
Monitor "Monitor0"
SubSection "Display"
Depth 24
Modes "1920x1080_60.00"
EndSubSection
EndSection
- 重启电脑
- 如果要使用物理屏,把这个文件删除即可
在vscode里打开IntelliSense配置的方法
ctrl+shift+P
cartographer安装
1. sudo apt-get update
sudo apt-get install -y python3-wstool python3-rosdep ninja-build stow
2. mkdir catkin_ws
cd catkin_ws
wstool init src
wstool merge -t src https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall
这一步会报错,可以在浏览器打开上面这个链接,把里面内容复制到src目录下的.rosinstall文件中,然后跳过这一步
wstool update -t src
3. sudo rosdepc init
rosdepc update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
这一步报错,可以把src中cartographer文件package.xml依赖中<depend>libabsl-dev</depend>删除,并且在src/cartographer/scripts/install_abseil.sh文件目录下运行install_abseil.sh这个sh文件来下载abseil安装
4、 catkin_make_isolated --install --use-ninja
Git使用记录
删除提交历史
# 删除本地最后一条记录,如果需要删除最后提交的N条记录,将“1”替换为一个具体的数字“N”即可。
git reset --hard HEAD~1
git显示中文乱码
在终端输入:
git config --global core.quotepath false
忽略已提交的内容(对于想停止同步已经上传的文件很有用)
git rm -r --cached 文件或文件夹路径
然后在.gitignore文件中忽略
git提交代码
https://zhuanlan.zhihu.com/p/193140870
docker及docker-compose安装
Docker Engine安装
Docker Engine有多种安装方式,这里选择apt repository方式。
Install using the apt repository
Set up the repository
- 更新软件包索引并安装软件包以允许使用 基于 HTTPS 的存储库
sudo apt-get update
sudo apt-get install \
ca-certificates \
curl \
gnupg
- 添加Docker官方GPG 锁钥:
sudo mkdir -m 0755 -p /etc/apt/keyrings
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /etc/apt/keyrings/docker.gpg
- 建立仓库
echo \
"deb [arch="$(dpkg --print-architecture)" signed-by=/etc/apt/keyrings/docker.gpg] https://download.docker.com/linux/ubuntu \
"$(. /etc/os-release && echo "$VERSION_CODENAME")" stable" | \
sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
安装Docker Engine
-
更新索引
sudo apt-get update -
sudo apt-get install docker-ce docker-ce-cli containerd.io docker-buildx-plugin docker-compose-plugin -
测试
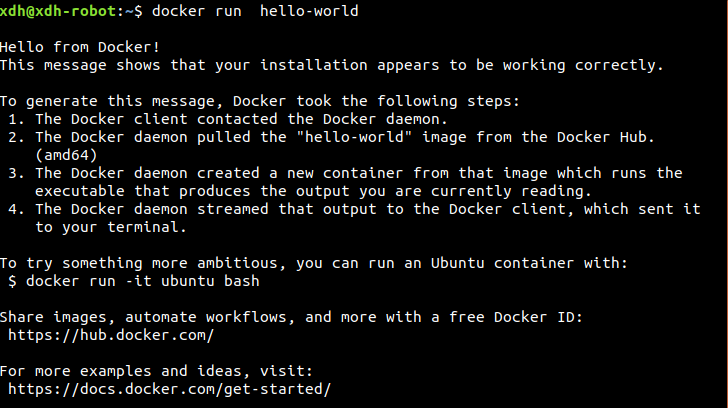
sudo docker run hello-world
有以下输出说明docker engine安装成功
![[Pasted image 20230506203241.png]]
后续:如果要在非sudo模式下使用Docker,参考官方设置:
 [](https://docs.docker.com/engine/install/linux-postinstall/#manage-docker-as-a-non-root-user)
[](https://docs.docker.com/engine/install/linux-postinstall/#manage-docker-as-a-non-root-user)
docker-compose安装
curl -SL https://github.com/docker/compose/releases/download/v2.17.2/docker-compose-linux-x86_64 -o /usr/local/bin/docker-compose
如果上面这步实在太慢,可以去github把文件下载下来,重命名成docker-compose,放到/usr/local/bin下,再执行下面步骤
sudo chmod +x /usr/local/bin/docker-compose
sudo ln -s /usr/local/bin/docker-compose /usr/bin/docker-compose
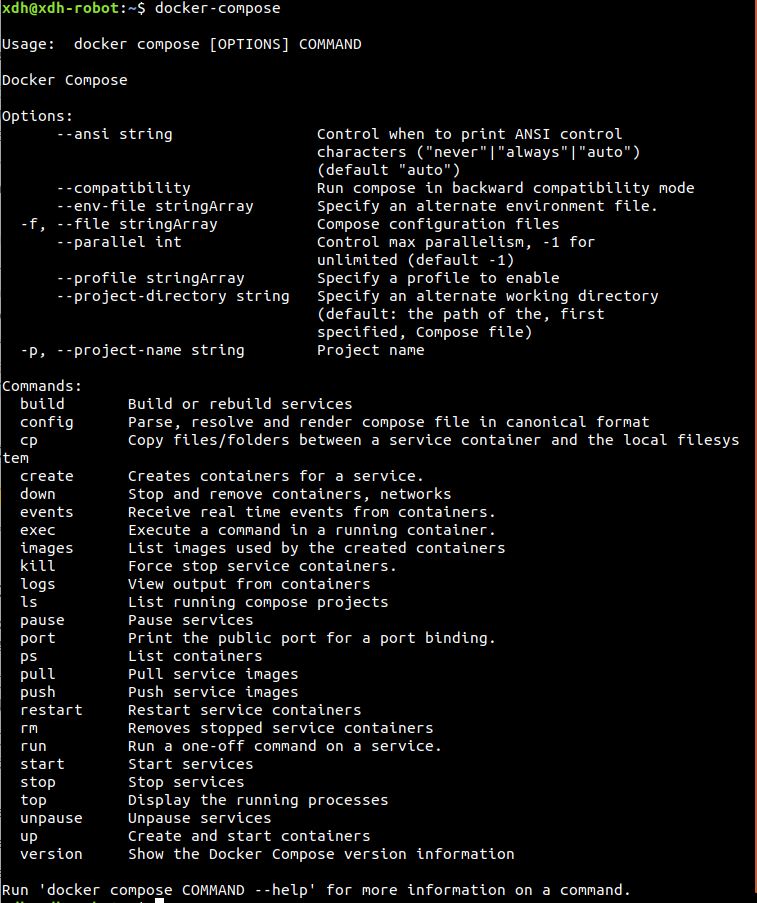
- 测试
docker-compose
常用操作命令
给文件夹赋予权限
sudo chmod -R 777 +文件地址
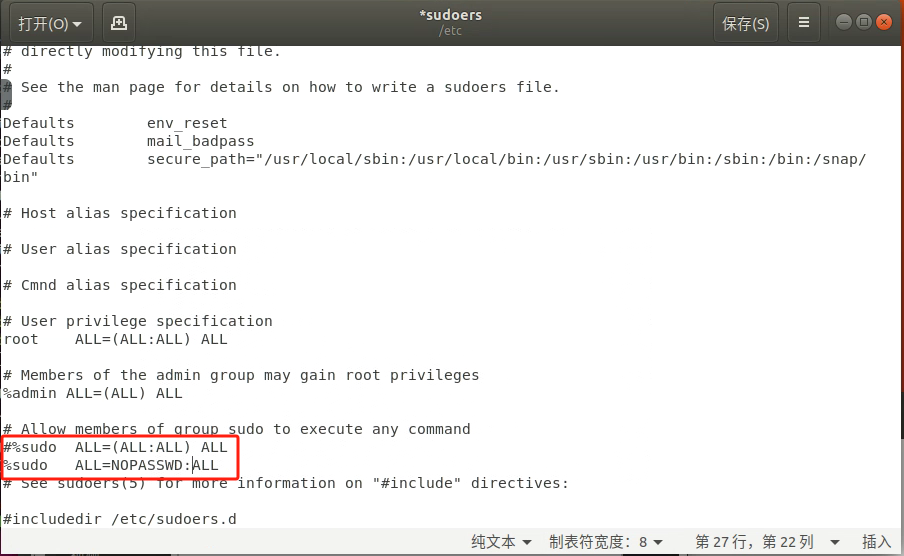
sudo免密码
打开如下文件
sudo gedit /etc/sudoers
注释掉,然后添加
ros常用命令
运行tf树
rosrun rqt_tf_tree rqt_tf_tree
单独编译某个包
catkin_make -DCATKIN_WHITELIST_PACKAGES="package1;package2"
恢复到生成所有包
catkin_make -DCATKIN_WHITELIST_PACKAGES=""
安装.run文件
cd 文件所在目录
sudo chmod +x ./xx.run
sudo ./xx.run
pip下载很慢
pip3 install -i https://pypi.tuna.tsinghua.edu.cn/simple <库的名称>
teamviewer提示'TeamViewer Daemon is not running'
运行
sudo teamviewer --daemon start

