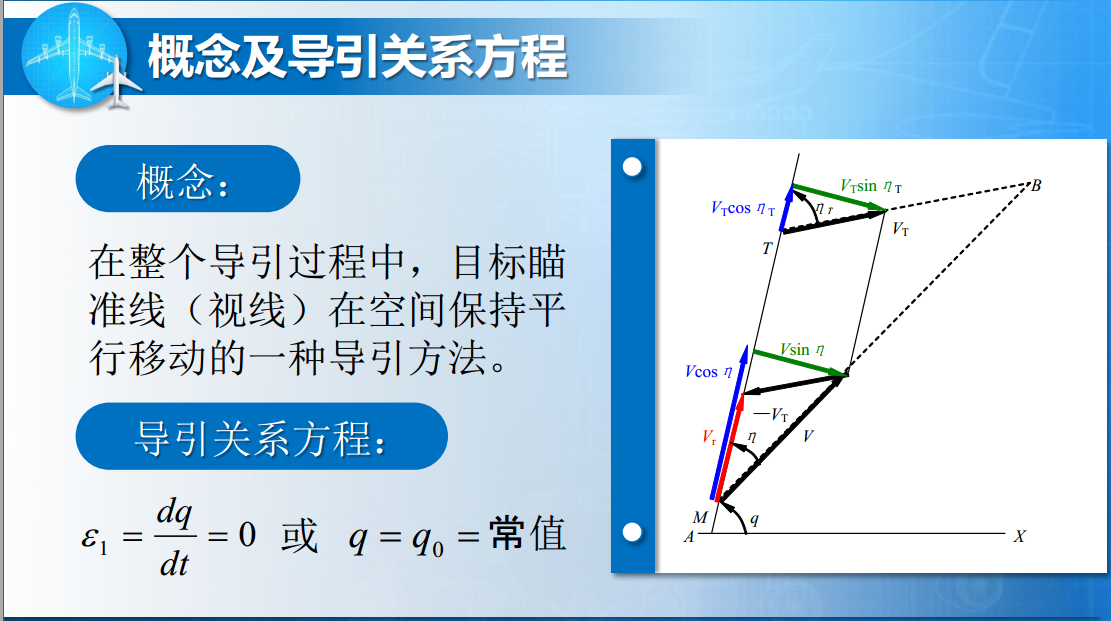
平行接近法导引弹道仿真
代码:
点击查看python代码
import numpy as np
from math import *
import matplotlib.pyplot as plt
plt.rcParams ['font.sans-serif']= ['SimHei']
def PingXing():
xM = 0*1000
yM = 0*1000
#初始弹道倾角
gammaM = 240/57.3
Vm = 300
aM = 10
xT = 5*1000
yT = 5*1000
#初始弹道倾角
gammaT = 5/57.3
Vt = 300
aT = 0
T = 100
step = 0.001
K = int(T/step)
pM = []
pT = []
gammaMA = []
tn = []
for i in range(0,K):
#目标运动方程
dVt = aT
gammaT += (0.2*step)/57.3;
Vt = Vt + step*dVt
dxT = Vt*cos(gammaT)
dyT = Vt*sin(gammaT)
xT = xT + step*dxT
yT = yT + step*dyT
#相对运动方程
drx = xT - xM
dry = yT - yM
q = atan2(dry,drx)
yetaT = q - gammaT #目标速度矢量前置角
yetaM = asin(Vt/Vm*sin(yetaT)) #平行接近法制导律指令导弹速度矢量前置角
gammaM = q-yetaM
print('飞行时间 %6.3f ' % (i*step),
'视线角q %6.3f' % (q*57.3),
'yetaT %6.3f' % (yetaT*57.3),
'yetaM %6.3f' % (yetaM*57.3))
#导弹运动方程
dVm = aM
dxM = Vm*cos(gammaM)
dyM = Vm*sin(gammaM)
xM = xM + step*dxM
yM = yM + step*dyM
Vm = Vm + step*dVm
gammaMdot = aM/Vm
gammaTdot = aT/Vt
pM.append([xM,yM])
pT.append([xT,yT])
tn.append(i*step)
gammaMA.append([gammaM*57.3])
if((yT < 0) or (yM <0)):
break;
if(sqrt((yT-yM)**2 + (xT-xM)**2)<1):
break;
pM = np.array(pM)
pT = np.array(pT)
show_GT(pM,pT)
show_Var(tn,gammaMA)
def show_Var(tn,Var):
plt.scatter(tn,Var,s=1)
plt.xlabel('x-price')
plt.ylabel('y-amount')
plt.legend(loc=4) # 指定legend的位置,类似象限的位置
plt.title('速度矢量前置角')
plt.show()
def show_GT(pM,pT):
plot2 = plt.plot(pM[:,0], pM[:,1], 'r', label='导弹运动轨迹')
plot2 = plt.plot(pT[:,0], pT[:,1], 'b', label='目标运动轨迹')
# plt.scatter(pM[:,0], pM[:,1],s=1, label='导弹运动轨迹')
# plt.scatter(pT[:,0], pT[:,1],s=1, label='目标运动轨迹')
plt.xlabel('x-price')
plt.ylabel('y-amount')
plt.legend(loc=4) # 指定legend的位置,类似象限的位置
plt.title('平行接近导引弹道')
plt.show()
#plt.savefig('polyfit.png')
if __name__ == "__main__":
PingXing()
仿真结果:
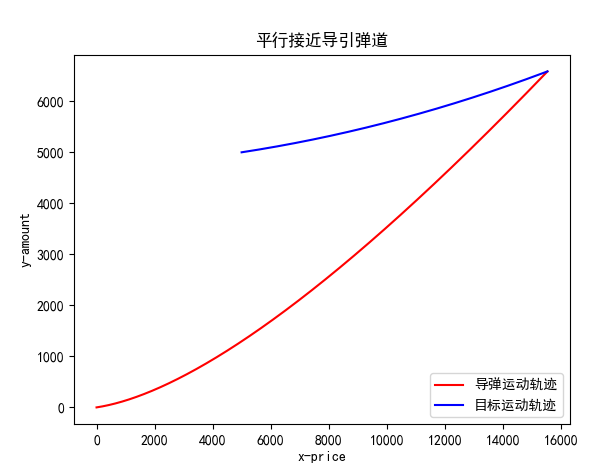
优点:弹道平直,末端过载较小
缺点:需要目标的速度及速度矢量前置角信息
本文来自博客园,作者:相对维度,转载请注明原文链接:https://www.cnblogs.com/wangjirui/p/17625421.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号