
随笔分类 - 控制
摘要: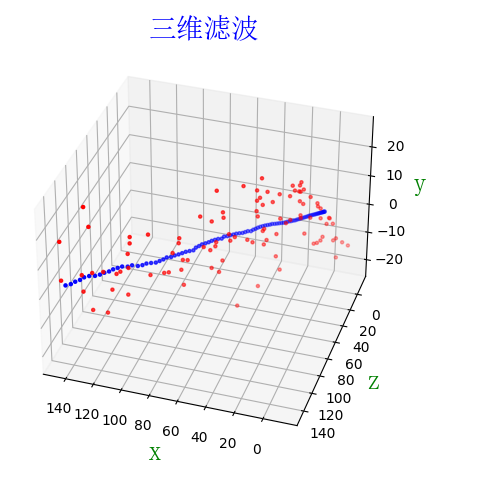 专业制导控制仿真+qq:1763053463
阅读全文
摘要: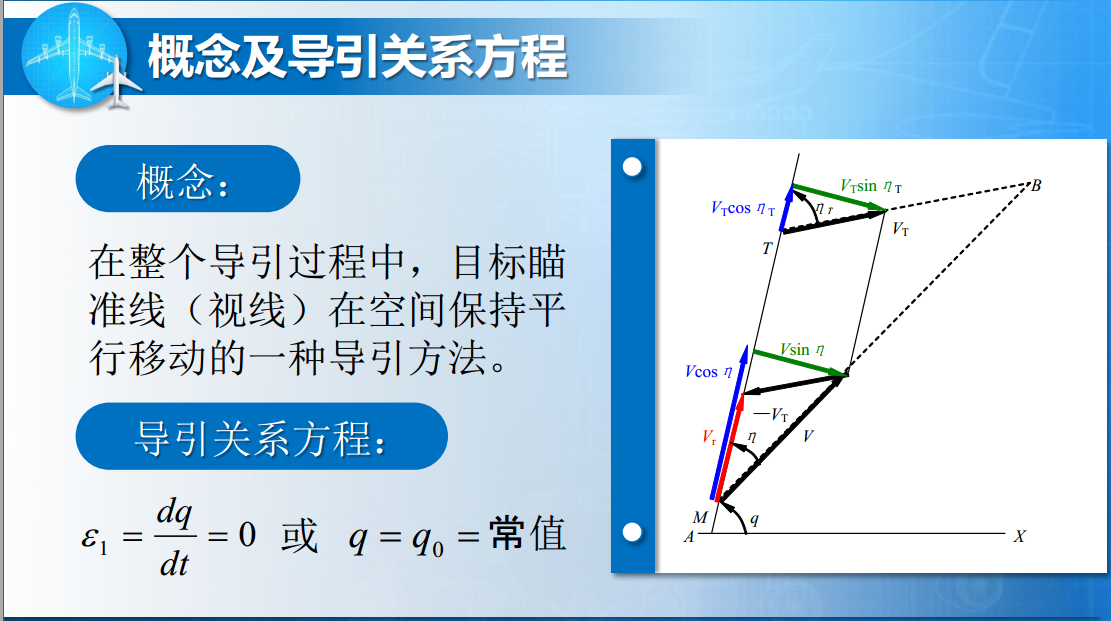 =0; y(1)=0; xita(1)=0; v=3; w=0.2; u=[v;w]; Z(:,1)=[-3;-3;0.2]; for k=1:1:t/
阅读全文
摘要:LQR状态调节器代码: 点击查看代码 function [u,x,y,Jmin,K,P,E] =LQ_adjustor( A,B,C,D,R,Q,x0,tmax,s1o2) % A,B,C,D分别为系数矩阵; x0为初始状态向量,u为最优控制 % R为正定加权矩阵,Q为正半定加权矩阵,x为最优轨线,
阅读全文
摘要:假设系统的传递函数为: (1)求状态空间模型 点击查看代码 num = [5 91 615 1825 2000]; %传递函数分子 den = [1 18 120 350 375]; %传递函数分母 [A,B,C,D] = tf2ss(num,den); %传递函数转状态空间模型 disp(A);
阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号