
内容参考原文《A Threshold Selection Method from Gray-Level Histograms》
引用自公众号: 写bug的程旭源
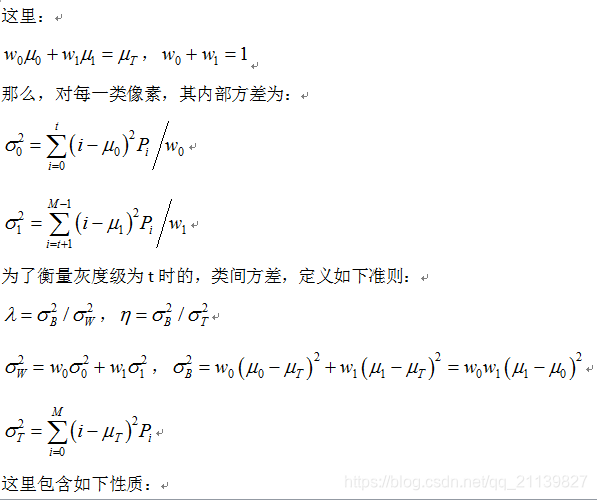
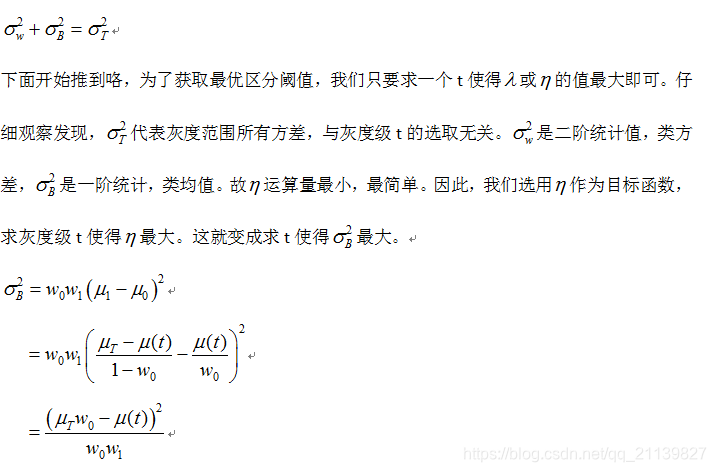
最大类间方差是由日本学者大津(Nobuyuki Otsu)于1979年提出,是一种自适应的阈值确定方法。算法假设图像像素能够根据阈值,被分成背景[background]和目标[objects]两部分。然后,计算该最佳阈值来区分这两类像素,使得两类像素区分度最大【用方差表达,具体公式见后】。OTSU的扩展算法,可进行多级阈值处理,称为“Multi Otsu method”【题外话】
设原始灰度级为M,灰度级为i的像素点个数为ni,对灰度直方图进行归一化:


opencv实现代码:
// An highlighted block
// m_otsu.cpp : 定义控制台应用程序的入口点。
//
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/core/core.hpp>
#include <iostream>
using namespace cv;
using namespace std;
//***************Otsu算法通过求类间方差极大值求自适应阈值******************
int OtsuAlgThreshold(const Mat image);
int main(int argc, char* argv[])
{
//读取图像
Mat image;
const char* Image1Name = "D:\\C++demo\\imgSeg\\img2.jpg";
image = imread(Image1Name);
cvtColor(image, image, CV_RGB2GRAY);
//CV_WINDOW_NORMAL参数:表示用户可以改变窗口大小
namedWindow("原图窗口", CV_WINDOW_NORMAL);
imshow("原图窗口", image);
//设置图像兴趣域,如果不需要可以删除这部分
//设置ROI区域 从点(0,875)为左上角,1900宽,1800长
Rect rect(0, 930, 1900,1800);
//在原图上画出ROI
rectangle(image, rect, Scalar(0, 255, 255), 2, 8);
Mat imageROI = image(rect);
namedWindow("imageROI", CV_WINDOW_NORMAL);
imshow("imageROI", imageROI);
Mat imageOutput;
Mat imageOtsu;
int thresholdValue = OtsuAlgThreshold(imageROI);
cout << "类间方差为: " << thresholdValue << endl;
//用thresholdValue 处理图片,阈值可以自己再调节,此处-4效果更好了
threshold(image, imageOutput, thresholdValue - 4 , 255, CV_THRESH_BINARY);
Opencv Otsu算法 作为对比
threshold(image, imageOtsu, 0, 255, CV_THRESH_OTSU);
namedWindow("Output Image", CV_WINDOW_NORMAL);
imshow("Output Image", imageOutput);
namedWindow("Opencv Otsu", CV_WINDOW_NORMAL);
imshow("Opencv Otsu", imageOtsu);
waitKey();
return 0;
}
//计算阈值,按照原理
int OtsuAlgThreshold(const Mat image)
{
if (image.channels() != 1)
{
cout << "Please input Gray-image!" << endl;
return 0;
}
int T = 0; //Otsu算法阈值
double varValue = 0; //类间方差中间值保存
double w0 = 0; //前景像素点数所占比例
double w1 = 0; //背景像素点数所占比例
double u0 = 0; //前景平均灰度
double u1 = 0; //背景平均灰度
//灰度直方图,下标是灰度值,保存内容是灰度值对应的像素点总数:
double Histogram[256] = { 0 };
uchar* data = image.data;
double totalNum = image.rows * image.cols; //像素总数
//计算灰度直方图分布
//Histogram数组下标是灰度值,保存内容是灰度值对应像素点数
//遍历 rows和cols
for (int i = 0; i < image.rows; i++)
{
for (int j = 0; j < image.cols; j++)
{
Histogram[data[i * image.step + j]]++;
}
}
for (int i = 0; i < 255; i++)
{
//每次遍历之前,初始化各变量
w1 = 0; u1 = 0; w0 = 0; u0 = 0;
//********背景各分量值计算********
for (int j = 0; j <= i; j++) //背景部分各值计算
{
w1 += Histogram[j]; //背景部分像素点总数
u1 += j * Histogram[j]; //背景部分像素总灰度和
}
if (w1 == 0) //背景部分像素点数为0时退出
{
break;
}
//背景像素平均灰度
u1 = u1 / w1;
// 背景部分像素点数所占比例
w1 = w1 / totalNum;
//***********前景各分量值计算开始**************************
for (int k = i + 1; k < 255; k++)
{
w0 += Histogram[k]; //前景部分像素点总数
u0 += k * Histogram[k]; //前景部分像素总灰度和
}
if (w0 == 0) //前景部分像素点数为0时退出
{
break;
}
u0 = u0 / w0; //前景像素平均灰度
w0 = w0 / totalNum; // 前景部分像素点数所占比例
//***********前景各分量值计算结束**************************
//***********类间方差计算******************************
//当前类间方差计算
double varValueI = w0 * w1 * (u1 - u0) * (u1 - u0);
if (varValue < varValueI)
{
varValue = varValueI;
T = i;
}
}
return T;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号