

%传统波束形成,CBF (Ps:这个程序是别人的,不是我写的,但是具体是在哪里找到的已经忘了)
clear all; close all; clc;
%---------初始化常量----------%
c = 334; % 声速c
fs = 1000; % 抽样频率fs
T = 0.1; %
t = 0:1/fs:T; % 时间 [0,0.1]
L = length(t); % 时间长度,采样总点数:101个
f = 500; % 感兴趣的频率,信号自己的频率
w = 2*pi*f; % 角频率 k = w/c; % 波数 k
M = 18; % 阵元个数,实际只有17个
%接下来是阵元坐标,声源位置,这里设置的是(12,10,12)点,同时设置阵元的高斯白噪声。
%---------各阵元坐标---------% %
Nmid = 12; % 参考点 %
d = 3; % 阵元间距 %
m = (0:1:M-1) yi = zeros(M,1); % 生成一个M*1维的零矩阵
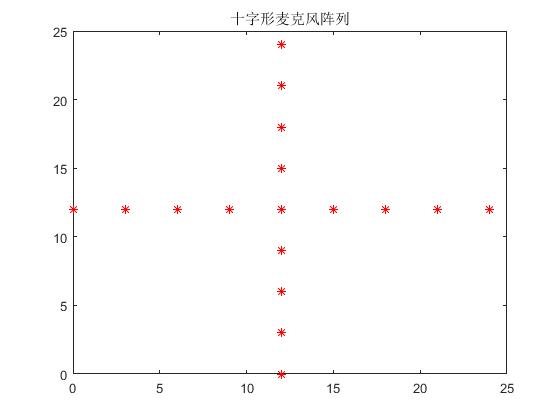
zi = [0;3;6;9;12;15;18;21;24;12;12;12;12;12;12;12;12;12];
xi = [12;12;12;12;12;12;12;12;12;0;3;6;9;12;15;18;21;24]; %形成柿子麦克风阵列坐标 %xi = xi.' % 列向量 m*d 阵元数*阵元间距
figure(1)
plot(xi,zi,'r*'); title('十字形麦克风阵列') %--------- 声源位置----------% x1 = 12; y1 = 10; z1 = 12; %声源位置 (12,10,12) x,z为水平面
x2 = 12; y2 = 0; z2 = 12; %参考点:(12,0,12)
Ric1 = sqrt((x1-xi).^2+(y1-yi).^2+(z1-zi).^2); % 声源到各阵元的距离
Ric2 = sqrt((x1-x2).^2+(y1-y2).^2+(z1-z2).^2); %声源到参考点的距离
Rn1 = Ric1 - Ric2; %声源至各阵元与参考阵元的声程差矢量
s1 = cos(2*w*t); % 参考阵元接收到的矢量
Am = 10^(-1); % 振幅
n1 = Am * (randn(M,L)+j*randn(M,L)); % 各阵元加上高斯白噪声,考虑复数18*101的阵列
p1 = zeros(M,L);
%3、延迟求和----------------------------------------------------------------------------
%整个程序最关键的部分,延迟求和,同时得到各阵元接收的声压信号矩阵。以及协方差矩阵,这个还有疑问,要把论文读懂来理解。
%--------------------------各阵元的延迟求和--------------------------------%
for k1 = 1:M
p1(k1,:) = Ric2/Ric1(k1)*s1.*exp(-j*w*Rn1(k1)/c); %Ric2/Ric1(k1)等于把每一个点的距离归一化.exp()表示时延 18*101的矩阵 % 接收到的信号
%时间和阵元的矩阵
end
p = p1+n1; % 各阵元接收的声压信号矩阵 R = p*p'/L; % 接收数据的自协方差矩阵 A.'是一般转置,A'是共轭转置。 %%%R代表幅值吗? %18*18
%4、扫描整个声源平面------------------------------------------------------------------------
%我们设置步长为0.1,扫描范围是20x20的平面,双重for循环得到M*1矢量矩阵,最后得到交叉谱矩阵(cross spectrum matrix)。由DSP理论,这个就是声音的功率。 %-------扫描范围------%
step_x = 0.1; % 步长设置为0.1 %和线阵里面扫描角度是一个道理
step_z = 0.1;
y = y1; %y=10
y1=10 x = (9:step_x:15); % 扫描范围 9-15
z = (9:step_z:15);
for k1=1:length(z) %先扫x轴,再扫z轴,设扫描到的点为(x=k2,z=k1),y=10 k1=61,k2=61
for k2=1:length(x)
Ri = sqrt((x(k2)-xi).^2+(y-yi).^2+(z(k1)-zi).^2); %(x(k2),10,z(k1))走到的点距离阵元的距离 %每走一步,产生一个18*1的矩阵
Ri2 = sqrt((x(k2)-x2).^2+(y-y2).^2+(z(k1)-z2).^2); %走到的点距离参考点的距离 %一个数 % 该扫描点到各阵元的聚焦距离矢量
Rn = Ri-Ri2; %每一步产生一个1*18的矩阵 % 扫描点到各阵元与参考阵元的程差矢量
b = exp(-j*w*Rn/c); % 声压聚焦方向矢量 %归整到阵元,18*1的矩阵,消除时间的影响
Pcbf(k1,k2) = abs(b'*R*b); % CSM
end
end %声音的功率
%5、归一化处理
%归一化处理的程序 %--------------------------------------归一化------------------------------%
for k1 = 1:length(z);
pp(k1) = max(Pcbf(k1,:)); % Pcbf 的第k1行的最大元素的值
end
Pcbf = Pcbf/max(pp); % 所有元素除以其最大值 归一化幅度
%6、作图
%观察得到的结果 %-------------------------------作图展示-----------------------------------%
figure(2);
surf(x,z,Pcbf); xlabel('x(m)'),ylabel('z(m)') ;title('CBF三维单声源图'); colorbar

figure(3) ;
pcolor(x,z,Pcbf); shading interp; xlabel('x(m)'); ylabel('z(m)'); title('CBF单声源图') ;colorbar
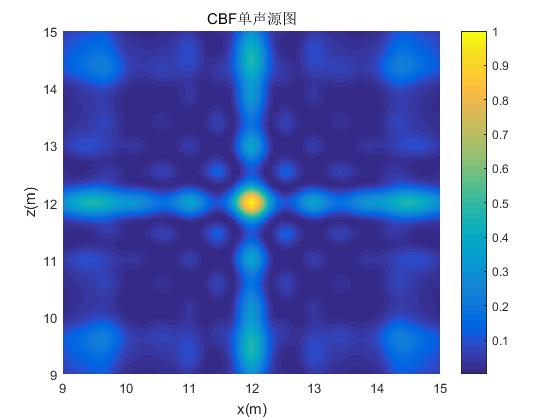
%7、结果
%十字型阵列最终得到的结果效果并不理想,没有达到一个点声源的理想结果
刚开始这个程序其实没怎么看懂,于是在网上找了CBF的知识,找到一篇可以找到参考的论文。【水声定位算法之CBF波束形成_360doc个人图书馆】http://www.360doc.cn/mip/558928696.html
自己照着这个程序写了一个线阵的,可是写了一天都没有写出来,后面的有些地方有点模糊,不知道怎么处理,以后再思考一下吧。

