

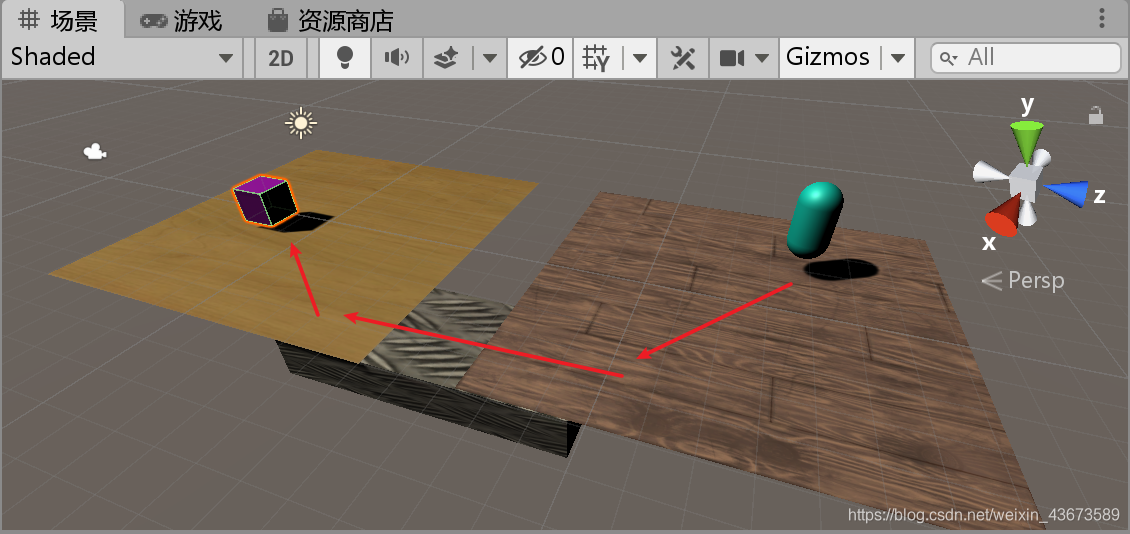
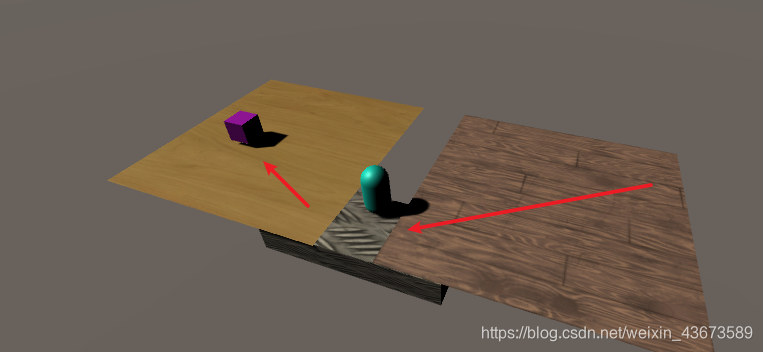
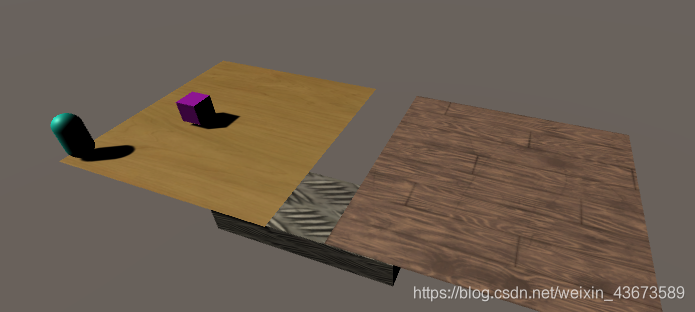
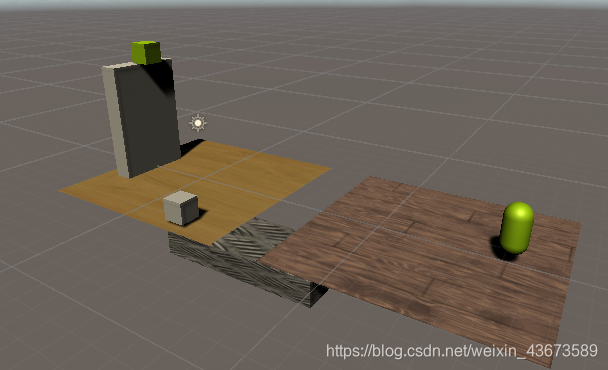
第一步搭建场景
两个平面,一个立方体,一个胶囊,一座桥(立方体)
让这个胶囊自主找立方体
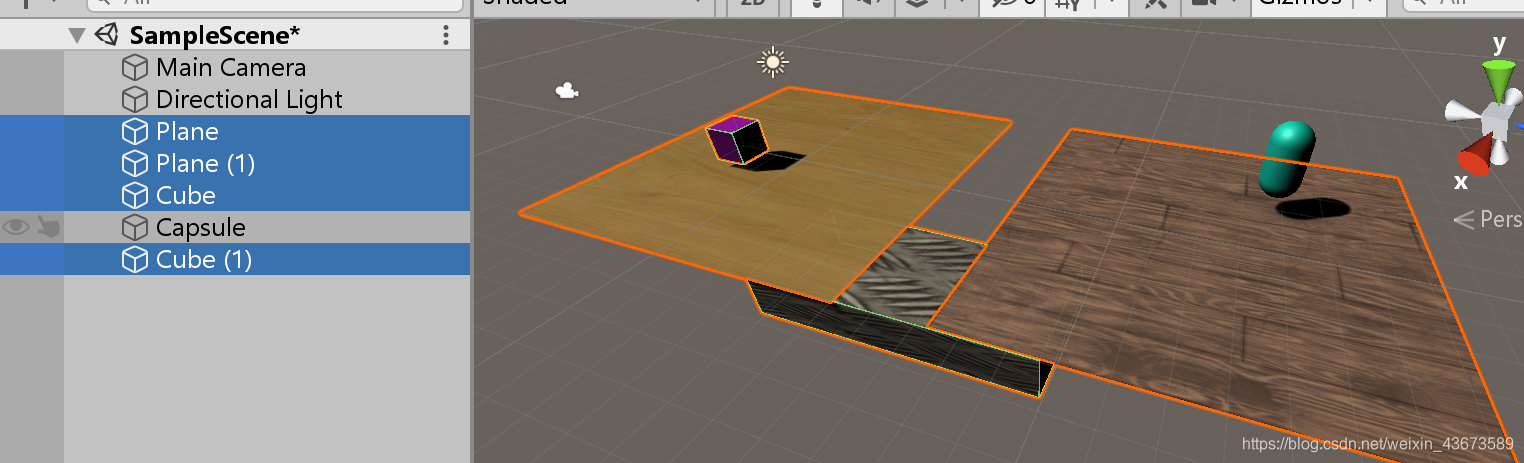
将除胶囊外其他场景中物体设为静态
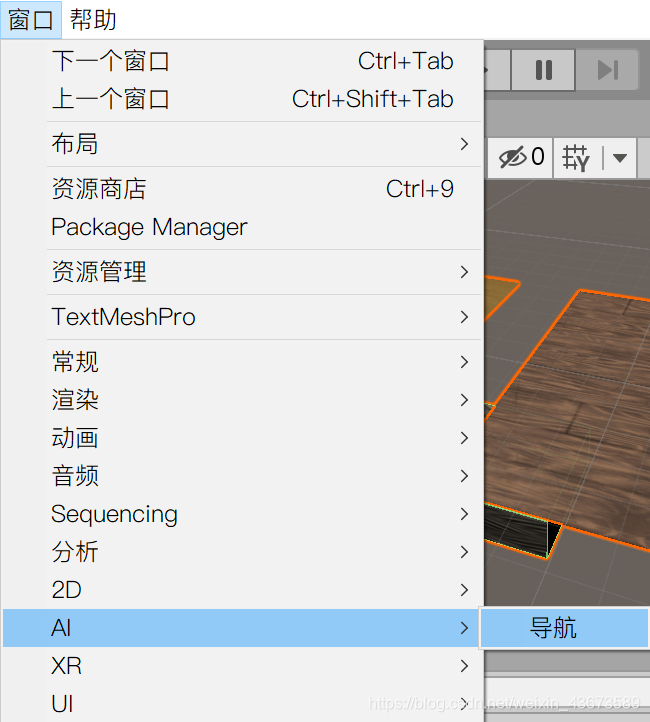
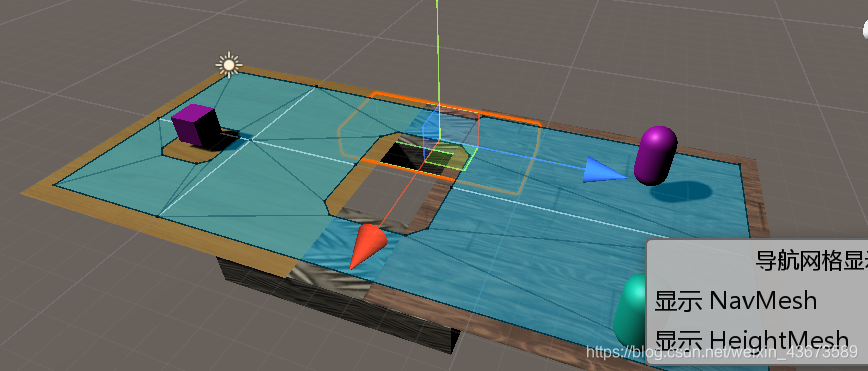
打开AI导航
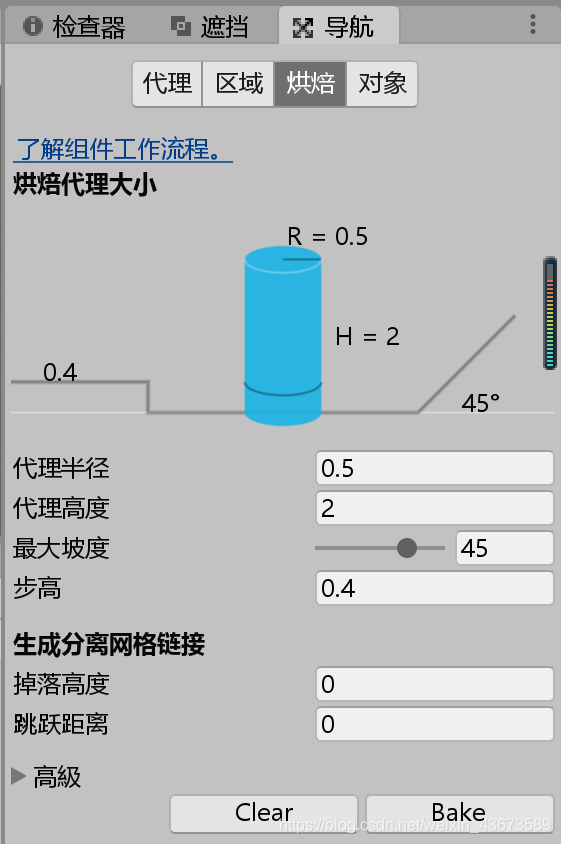
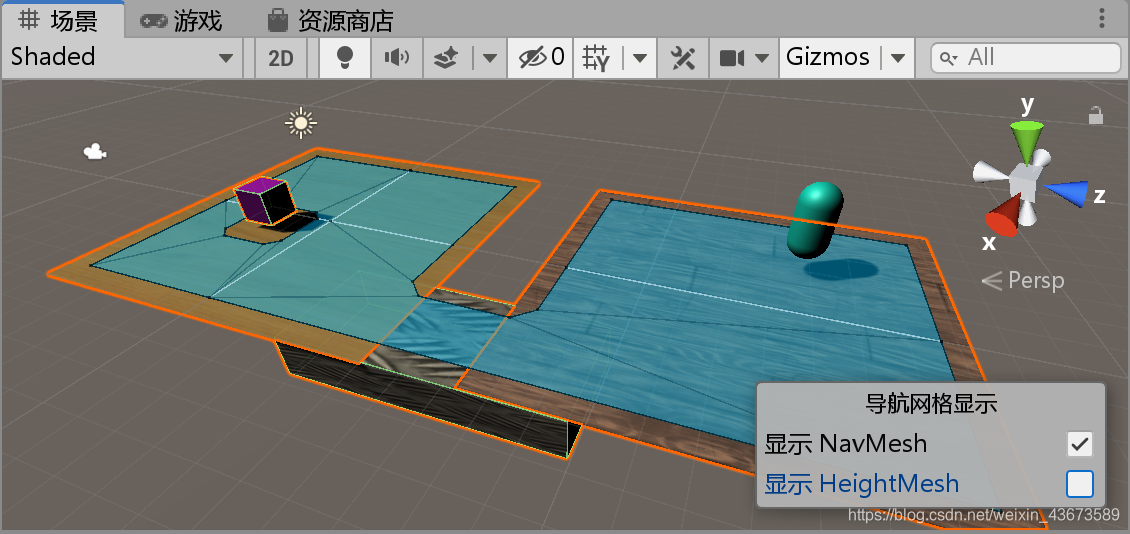
烘培一个导航网格
给胶囊添加智能体
编辑AI寻路脚本
using System.Collections; using System.Collections.Generic; using UnityEngine; using UnityEngine.AI; public class AINavigation : MonoBehaviour { public GameObject target; private NavMeshAgent agent; // Start is called before the first frame update void Start() { agent = GetComponent<NavMeshAgent>(); agent.destination = target.transform.position; } // Update is called once per frame void Update() { } }脚本绑定胶囊上
指定cube
效果

现在要实现另一个功能,就是鼠标点击哪儿,物体就往哪儿走。
这个功能在游戏中很常用。
发射一个射线,射线和地板相交的点,就是要走到的位置。
代码
using System.Collections; using System.Collections.Generic; using UnityEngine; using UnityEngine.AI; public class AINavigation : MonoBehaviour { public GameObject target; private NavMeshAgent agent; // Start is called before the first frame update void Start() { agent = GetComponent<NavMeshAgent>(); agent.destination = target.transform.position; } // Update is called once per frame void Update() { if(Input.GetMouseButton(0)) { RaycastHit hit; if(Physics.Raycast(Camera.main.ScreenPointToRay(Input.mousePosition),out hit)) { agent.destination = hit.point; } } } }效果
鼠标点击哪就走到哪儿,有内味儿了
而且还可以自动避障哦
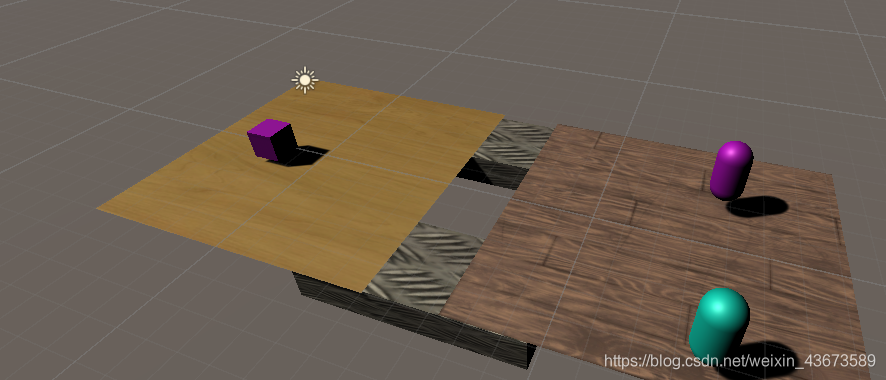
按下图修改场景
桥*2、胶囊*2
新增的桥设置静态
场景已改变,自主导航网格需要重新烘培
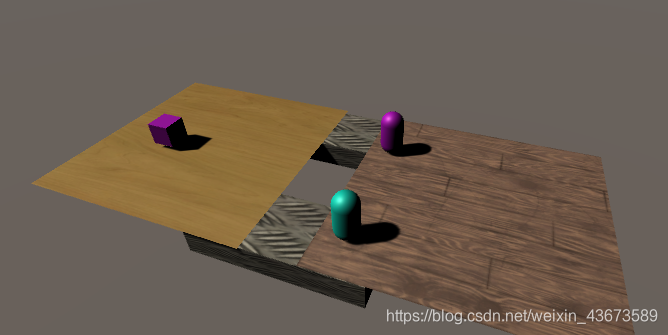
效果默认走最短路径
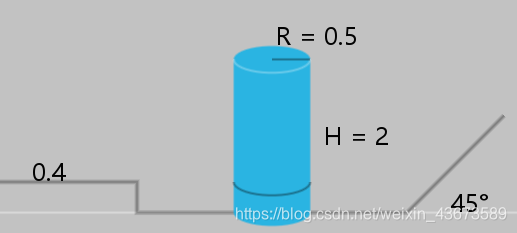
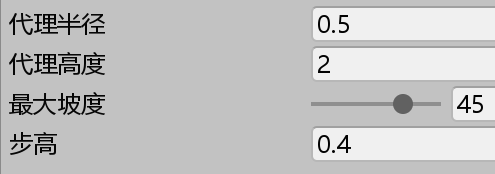
面板解释
跳跃不超过0.4m,坡度不超过45°
自动导航的相关限制参数
现在让一个胶囊指定走一个桥,不能走另一个
选择胶囊,设置智能寻路属性
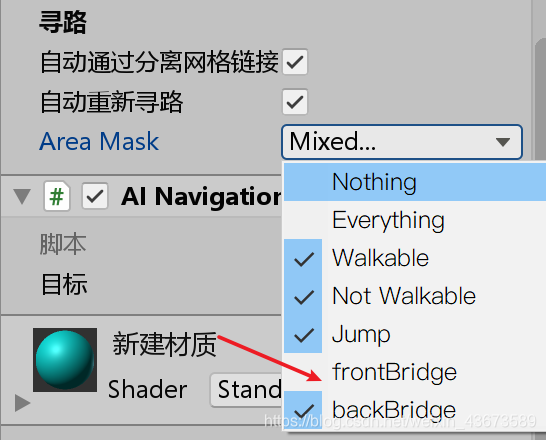
能走哪些区域,不能走哪些区域,设置好
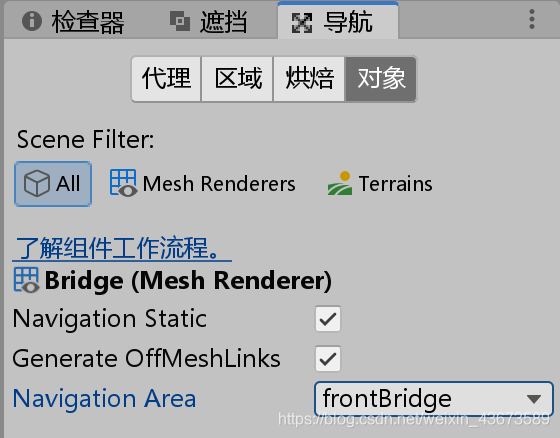
指定两个桥的导航所属区域,一个front,一个back
一定要记住,修改参数后要重新烘焙
区域图
效果

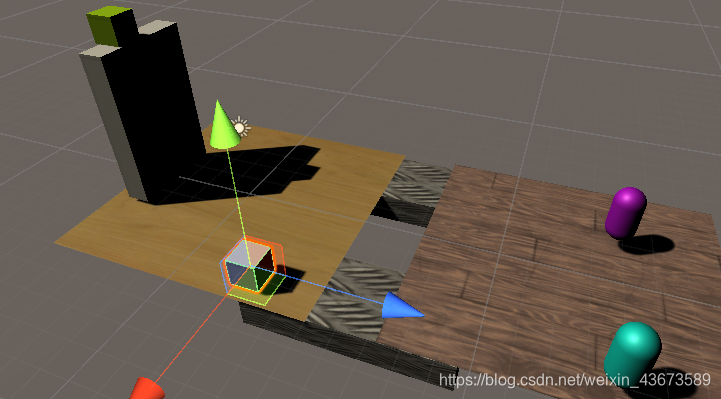
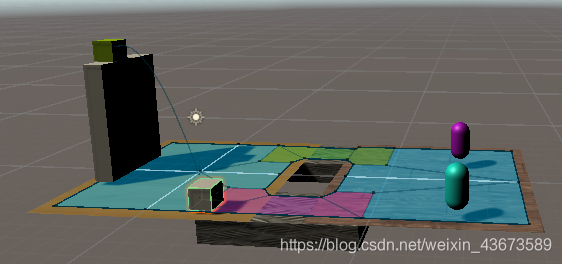
搭建场景然后烘培
正常情况下,这两个胶囊会在墙下面停下来,够不着立方体
现在要实现让两个胶囊走天路,去够它
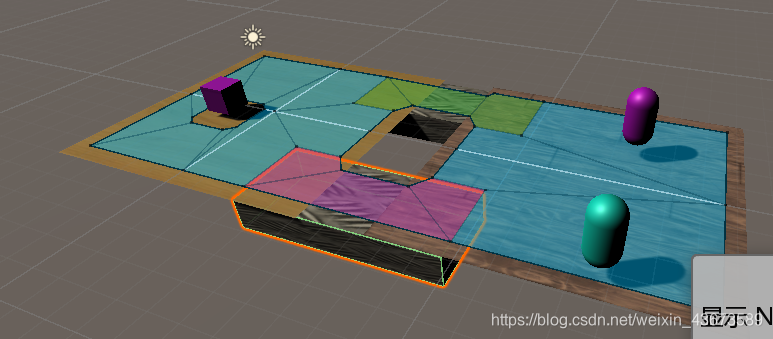
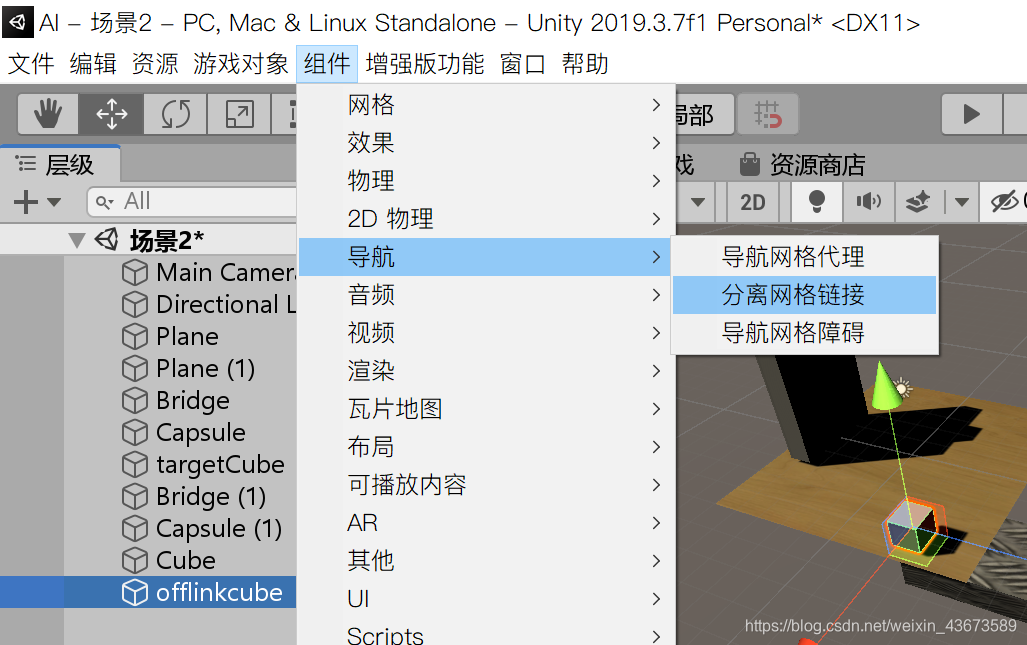
把导航网格不连接的区域把它link起来
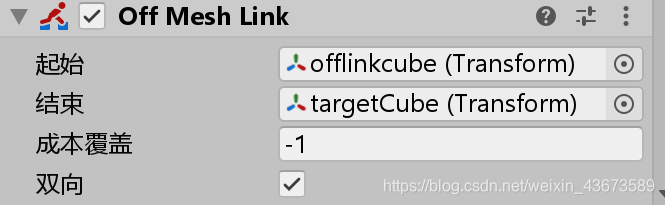
给那个cube添加off mesh link组件
再烘培一下
已连接
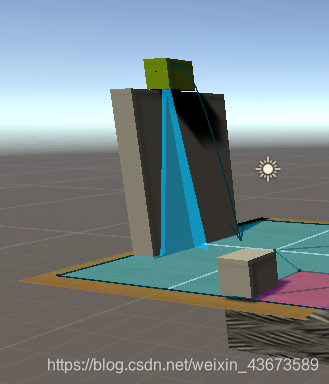
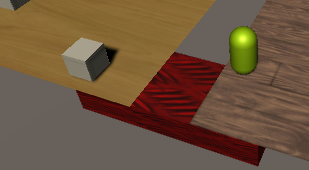
但是现在还是原样,不能够着
要设置烘培高度
烘培后区域变化
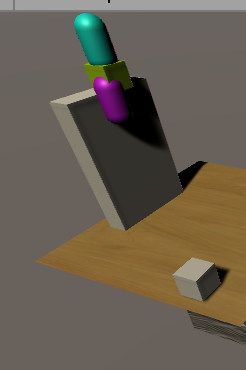
效果
这个cube只是作为一个连接物,并不从上面过(逻辑有点奇怪)

导航障碍组件
修改场景
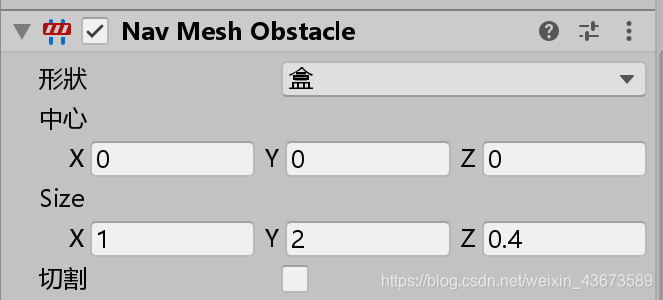
为桥添加导航障碍组件
编写脚本
using System.Collections; using System.Collections.Generic; using UnityEngine; using UnityEngine.AI; public class NMOCtrl : MonoBehaviour { private NavMeshObstacle obs; // Start is called before the first frame update void Start() { obs = this.GetComponent<NavMeshObstacle>(); obs.enabled = true; } // Update is called once per frame void Update() { if(Input.GetButtonDown("Fire1")) { if (obs) { obs.enabled = false; this.GetComponent<Renderer>().material.color = Color.green; } } if (Input.GetButtonUp("Fire1")) { if (obs) { obs.enabled = true; this.GetComponent<Renderer>().material.color = Color.red; } } } }绑定到桥上即可
修改参数
高度要大于1,不然没有阻碍效果!
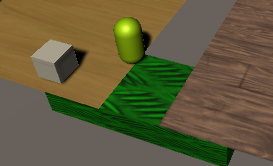
效果

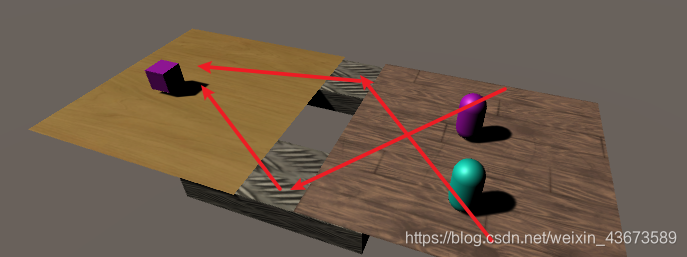
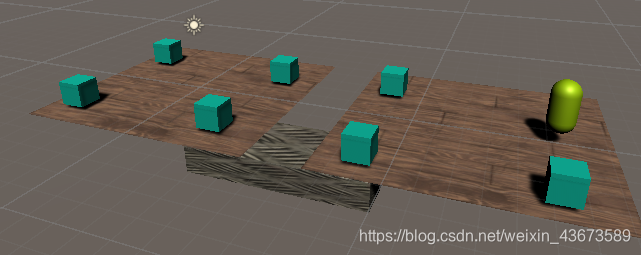
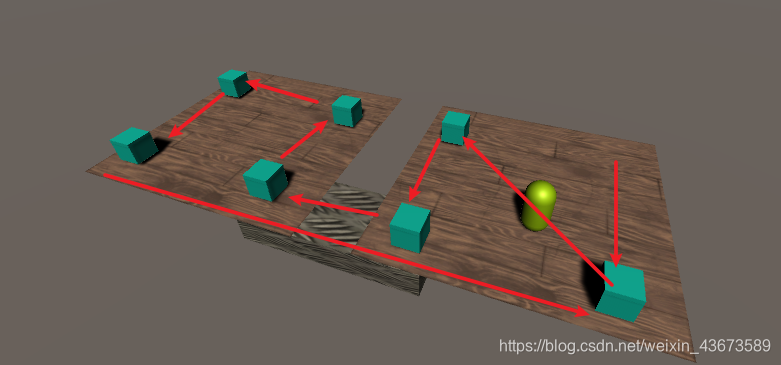
固定路线巡航
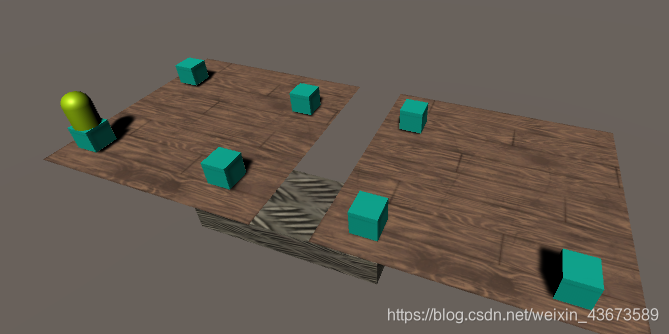
创建一个空对象
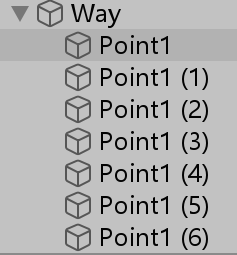
创建n个立方体做路径点
创建脚本
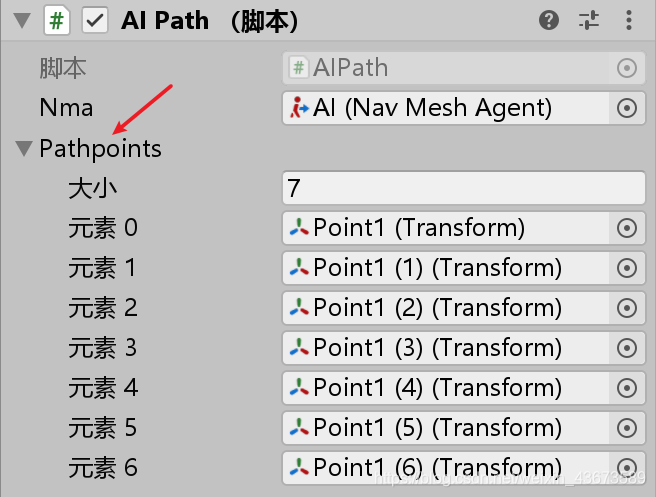
using System.Collections; using System.Collections.Generic; using UnityEngine; using UnityEngine.AI; public class AIPath : MonoBehaviour { public NavMeshAgent nma; public Transform[] pathpoints; int currentpointindex; // Start is called before the first frame update void Start() { nma.SetDestination(pathpoints[0].position); } // Update is called once per frame void Update() { if(nma.remainingDistance<nma.stoppingDistance) { currentpointindex = (currentpointindex + 1) % pathpoints.Length; nma.SetDestination(pathpoints[currentpointindex].position); } } }
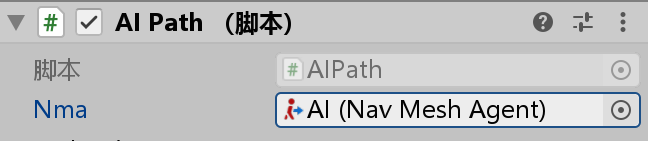
AI(胶囊)
胶囊智能体指定N.M.A.
把路径点拖入下面的数组
往这个字样上拖
场景静态化并烘培
运行
效果
无限循环
有限路径代码(停在最后一个路径点)
if(nma.remainingDistance<nma.stoppingDistance && currentpointindex<(pathpoints.Length-1))效果

原博地址
https://blog.csdn.net/weixin_43673589
