


简介
作业1简单实现了一个以一定初始速度和角速度的模型和墙壁碰撞的效果.
总共讲解了三种算法
-
impulse (脉冲法)
-
Shape Matching(基于形状保持的算法, 不包含物理特性)
-
Penalty methods
Shape Matching 可以说是最简单的方法之一
因为完全不涉及角速度. 基础逻辑理论就是, 当模型和墙壁发生碰撞的时候.这些碰撞的粒子会产生相反的形变但是. 我们强制将其整理保持形状的一致性. 就是先形变. 再变回来.
由于形变的步骤. 是中间步骤. 不会展示出来. 所以效果还是挺好的.
Image
TIPS
code
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Rigid_Bunny_by_Shape_Matching : MonoBehaviour
{
public bool launched = false;
Vector3[] X; // world position
Vector3[] Y; // temp world position
Vector3[] Q; // Local coordinates
Vector3[] V; // speed
Vector3[] OldX;
Matrix4x4 QQt = Matrix4x4.zero;
Vector3 G = new Vector3(0.0f, -9.8f, 0.0f);
float linear_decay = 0.999f;
Vector3 ground = new Vector3(0, 0.01f, 0);
Vector3 groundNormal = new Vector3(0, 1, 0);
Vector3 wall = new Vector3(2.01f, 0, 0);
Vector3 wallNormal = new Vector3(-1, 0, 0);
float mu_T = 0.5f; // μ_T may be coefficient of air resistance
float mu_N = 5.0f; // μ_N may be Coefficient of Restitution
float m_timer = 0;
// Start is called before the first frame update
void Start()
{
Mesh mesh = GetComponent<MeshFilter>().mesh;
V = new Vector3[mesh.vertices.Length];
X = mesh.vertices;
Y = mesh.vertices;
OldX = mesh.vertices;
Q = mesh.vertices;
//Centerizing Q.
Vector3 c=Vector3.zero;
for(int i=0; i<Q.Length; i++)
c+=Q[i];
c/=Q.Length;
Debug.Log("C: " + c);
for(int i=0; i<Q.Length; i++)
Q[i]-=c;
//Get QQ^t ready.
for(int i=0; i<Q.Length; i++)
{
QQt[0, 0]+=Q[i][0]*Q[i][0];
QQt[0, 1]+=Q[i][0]*Q[i][1];
QQt[0, 2]+=Q[i][0]*Q[i][2];
QQt[1, 0]+=Q[i][1]*Q[i][0];
QQt[1, 1]+=Q[i][1]*Q[i][1];
QQt[1, 2]+=Q[i][1]*Q[i][2];
QQt[2, 0]+=Q[i][2]*Q[i][0];
QQt[2, 1]+=Q[i][2]*Q[i][1];
QQt[2, 2]+=Q[i][2]*Q[i][2];
}
QQt[3, 3]=1;
for(int i=0; i<X.Length; i++)
V[i][0]=4.0f;
Update_Mesh(transform.position, Matrix4x4.Rotate(transform.rotation), 0);
transform.position=Vector3.zero;
transform.rotation=Quaternion.identity;
}
Matrix4x4 vector3x1dotvector1x3(Vector3 A, Vector3 B)
{
Matrix4x4 rlt = Matrix4x4.zero;
rlt[3, 3] = 1.0f;
rlt[0, 0] = A[0] * B[0];
rlt[0, 1] = A[0] * B[1];
rlt[0, 2] = A[0] * B[2];
rlt[1, 0] = A[1] * B[0];
rlt[1, 1] = A[1] * B[1];
rlt[1, 2] = A[1] * B[2];
rlt[2, 0] = A[2] * B[0];
rlt[2, 1] = A[2] * B[1];
rlt[2, 2] = A[2] * B[2];
return rlt;
}
// Polar Decomposition that returns the rotation from F.
Matrix4x4 Get_Rotation(Matrix4x4 F)
{
Matrix4x4 C = Matrix4x4.zero;
for(int ii=0; ii<3; ii++)
for(int jj=0; jj<3; jj++)
for(int kk=0; kk<3; kk++)
C[ii,jj]+=F[kk,ii]*F[kk,jj];
Matrix4x4 C2 = Matrix4x4.zero;
for(int ii=0; ii<3; ii++)
for(int jj=0; jj<3; jj++)
for(int kk=0; kk<3; kk++)
C2[ii,jj]+=C[ii,kk]*C[jj,kk];
float det = F[0,0]*F[1,1]*F[2,2]+
F[0,1]*F[1,2]*F[2,0]+
F[1,0]*F[2,1]*F[0,2]-
F[0,2]*F[1,1]*F[2,0]-
F[0,1]*F[1,0]*F[2,2]-
F[0,0]*F[1,2]*F[2,1];
float I_c = C[0,0]+C[1,1]+C[2,2];
float I_c2 = I_c*I_c;
float II_c = 0.5f*(I_c2-C2[0,0]-C2[1,1]-C2[2,2]);
float III_c = det*det;
float k = I_c2-3*II_c;
Matrix4x4 inv_U = Matrix4x4.zero;
if(k<1e-10f)
{
float inv_lambda=1/Mathf.Sqrt(I_c/3);
inv_U[0,0]=inv_lambda;
inv_U[1,1]=inv_lambda;
inv_U[2,2]=inv_lambda;
}
else
{
float l = I_c*(I_c*I_c-4.5f*II_c)+13.5f*III_c;
float k_root = Mathf.Sqrt(k);
float value=l/(k*k_root);
if(value<-1.0f) value=-1.0f;
if(value> 1.0f) value= 1.0f;
float phi = Mathf.Acos(value);
float lambda2=(I_c+2*k_root*Mathf.Cos(phi/3))/3.0f;
float lambda=Mathf.Sqrt(lambda2);
float III_u = Mathf.Sqrt(III_c);
if(det<0) III_u=-III_u;
float I_u = lambda + Mathf.Sqrt(-lambda2 + I_c + 2*III_u/lambda);
float II_u=(I_u*I_u-I_c)*0.5f;
float inv_rate, factor;
inv_rate=1/(I_u*II_u-III_u);
factor=I_u*III_u*inv_rate;
Matrix4x4 U = Matrix4x4.zero;
U[0,0]=factor;
U[1,1]=factor;
U[2,2]=factor;
factor=(I_u*I_u-II_u)*inv_rate;
for(int i=0; i<3; i++)
for(int j=0; j<3; j++)
U[i,j]+=factor*C[i,j]-inv_rate*C2[i,j];
inv_rate=1/III_u;
factor=II_u*inv_rate;
inv_U[0,0]=factor;
inv_U[1,1]=factor;
inv_U[2,2]=factor;
factor=-I_u*inv_rate;
for(int i=0; i<3; i++)
for(int j=0; j<3; j++)
inv_U[i,j]+=factor*U[i,j]+inv_rate*C[i,j];
}
Matrix4x4 R=Matrix4x4.zero;
for(int ii=0; ii<3; ii++)
for(int jj=0; jj<3; jj++)
for(int kk=0; kk<3; kk++)
R[ii,jj]+=F[ii,kk]*inv_U[kk,jj];
R[3,3]=1;
return R;
}
// Update the mesh vertices according to translation c and rotation R.
// It also updates the velocity.
void Update_Mesh(Vector3 c, Matrix4x4 R, float inv_dt)
{
for(int i=0; i<Q.Length; i++)
{
Vector3 x=(Vector3)(R*Q[i])+c;
V[i] = (x-X[i])*inv_dt;
X[i] = x;
}
Mesh mesh = GetComponent<MeshFilter>().mesh;
mesh.vertices=X;
}
void Collision(float inv_dt)
{
for(int i=0; i<Q.Length; i++)
{
if(Vector3.Dot(X[i] - ground, groundNormal) < 0 && Vector3.Dot(V[i], groundNormal) < 0)// collision with ground
{
Vector3 VN = Vector3.Dot(V[i], groundNormal) * groundNormal;
Vector3 VT = V[i] - VN;
float a = Mathf.Max(0, 1.0f - mu_T * (1.0f + mu_N)) * Vector3.Magnitude(VN) / Vector3.Magnitude(VT);
V[i] = -1.0f * mu_N * VN + 2.0f * a * VT;
}
else if(Vector3.Dot(X[i] - wall, wallNormal) < 0 && Vector3.Dot(V[i], wallNormal) < 0) // collision with wall
{
Vector3 VN = Vector3.Dot(V[i], wallNormal) * wallNormal;
Vector3 VT = V[i] - VN;
float a = Mathf.Max(0, 1.0f - mu_T * (1.0f + mu_N)) * Vector3.Magnitude(VN) / Vector3.Magnitude(VT);
V[i] = -1.0f * mu_N * VN + 2.0f * a * VT;
}
}
}
// Update is called once per frame
void Update()
{
if (Input.GetKey("l"))
{
launched = true;
for(int i=0; i<V.Length; i++)
{
V[i] = new Vector3(5.0f, 2.0f, 0.0f);
}
}
if (Input.GetKey("r"))
{
launched = false;
for (int i = 0; i < V.Length; i++)
{
V[i] = new Vector3(4.0f, 0.0f, 0.0f);
}
Update_Mesh(new Vector3(0, 0.6f, 0), Matrix4x4.Rotate(transform.rotation), 0);
}
if(!launched)
{
return;
}
//m_timer += Time.time;
//if (m_timer <= 500)
//{
// return;
//}
//else
//{
// m_timer = 0;
//}
float dt = 0.015f;
//Step 1: run a simple particle system.
for(int i=0; i<V.Length; i++)
{
V[i] = V[i] + G * dt;
V[i] *= linear_decay;
}
//Step 2: Perform simple particle collision.
Collision(1/dt);
// Step 3: Use shape matching to get new translation c and
// new rotation R. Update the mesh by c and R.
//Shape Matching (translation)
for(int i=0; i<V.Length; i++)
{
Y[i] = X[i] + V[i] * dt;
}
// calc c
Vector3 c = new Vector3(0, 0, 0);
for(int i=0; i<V.Length; i++)
{
c += Y[i];
}
c = c / V.Length;
// calc A
Matrix4x4 A = Matrix4x4.zero;
A[3, 3] = 1.0f;
for (int i=0; i<V.Length; i++)
{
Matrix4x4 o = vector3x1dotvector1x3(Y[i] - c, Q[i]);
A[0, 0] += o[0, 0];
A[0, 1] += o[0, 1];
A[0, 2] += o[0, 2];
A[1, 0] += o[1, 0];
A[1, 1] += o[1, 1];
A[1, 2] += o[1, 2];
A[2, 0] += o[2, 0];
A[2, 1] += o[2, 1];
A[2, 2] += o[2, 2];
}
A = A * QQt.inverse;
//Shape Matching (rotation)
// calc R
Matrix4x4 R = Matrix4x4.zero;
R = Get_Rotation(A);
Update_Mesh(c, R, 1/dt);
}
}
TRICK
PIPELINE
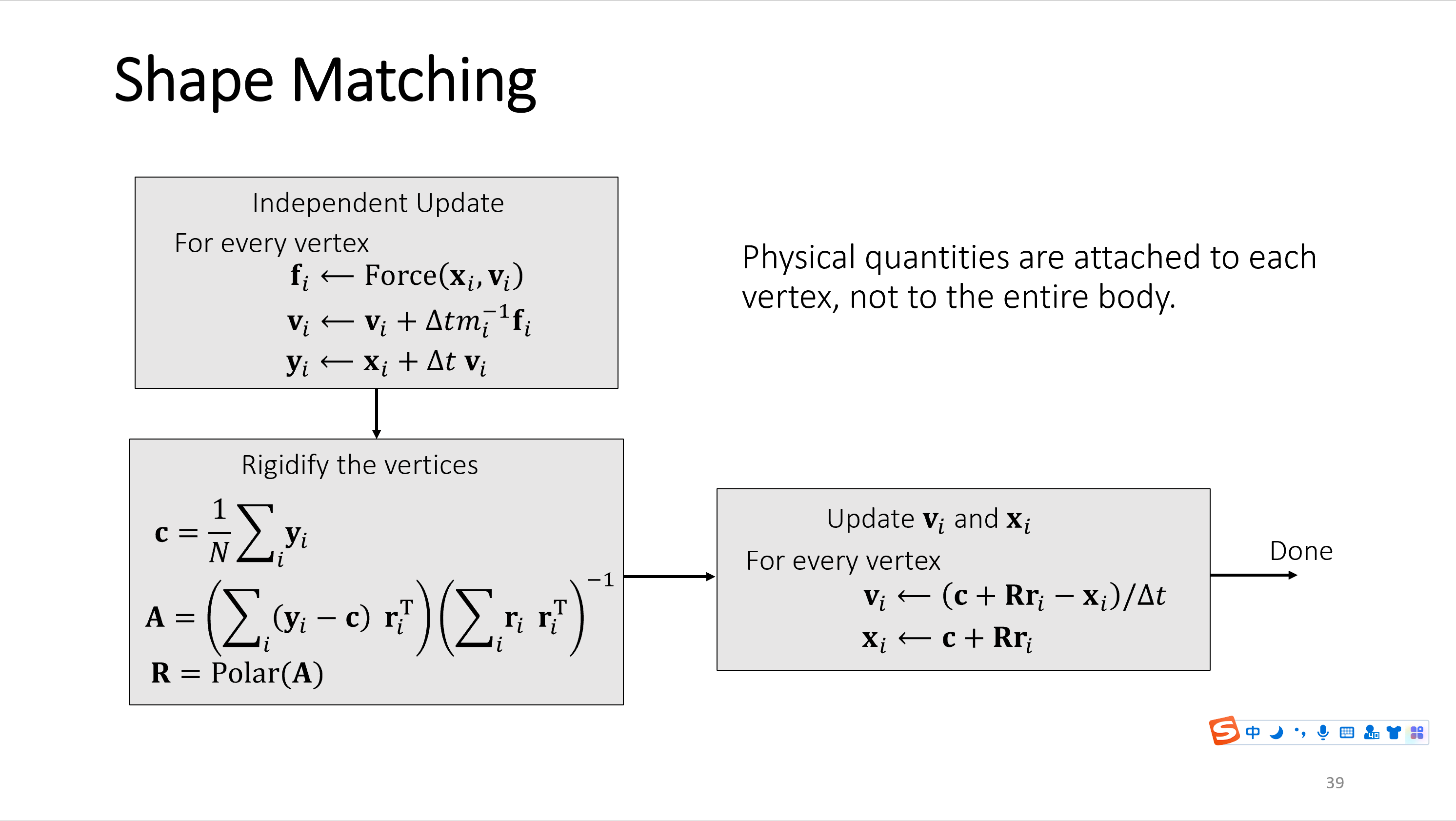
计算 C (模型质心坐标)
计算 A (通过A计算得到R, 即 旋转矩阵) == 从A得到R. 老师已经提供了.
更新顶点坐标
Trick
在处理碰撞的函数中. 里面的参数是自己调整的参数. 比如 5.0f 逻辑上 μ_T μ_N 都应该是一个小于1的数. 但是, 测试后感觉效果不是特别好. 如果你知道为什么的话, 请留言.
请看完bilibli 4个视屏后开始自己的作业.
参考链接
配置VS 作为 Unity 的配置环境
https://blog.csdn.net/qq_34405576/article/details/105572069
源码参考师弟写出来的, 大部分是抄的嘿嘿~~ 侵权删除.
---------------------------我的天空里没有太阳,总是黑夜,但并不暗,因为有东西代替了太阳。虽然没有太阳那么明亮,但对我来说已经足够。凭借着这份光,我便能把黑夜当成白天。我从来就没有太阳,所以不怕失去。
--------《白夜行》


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· 无需6万激活码!GitHub神秘组织3小时极速复刻Manus,手把手教你使用OpenManus搭建本
· Manus爆火,是硬核还是营销?
· 终于写完轮子一部分:tcp代理 了,记录一下
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 单元测试从入门到精通
2017-12-18 LInux main.cpp 编码问题 导致影响后面的内容