四足机器人研究进展
波士顿Spot

宇树科技Unitree GO1
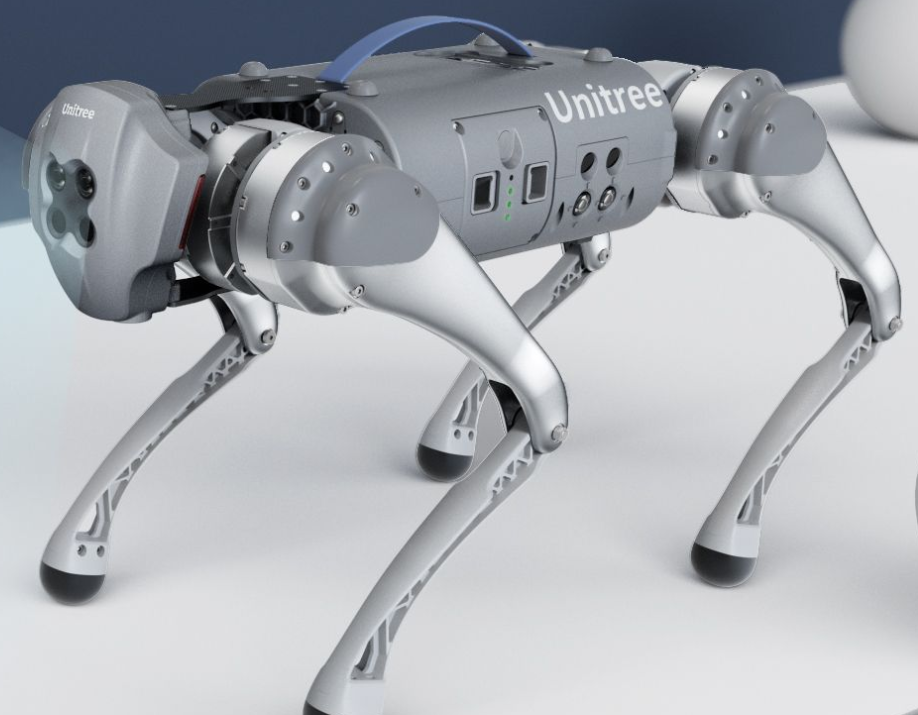
https://www.unitree.com/cn/products/go1
https://github.com/unitreerobotics/unitree_ros
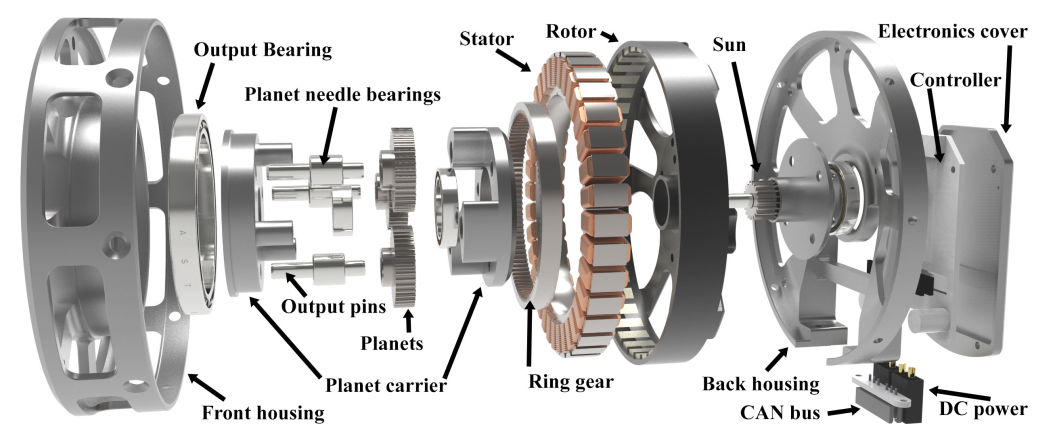
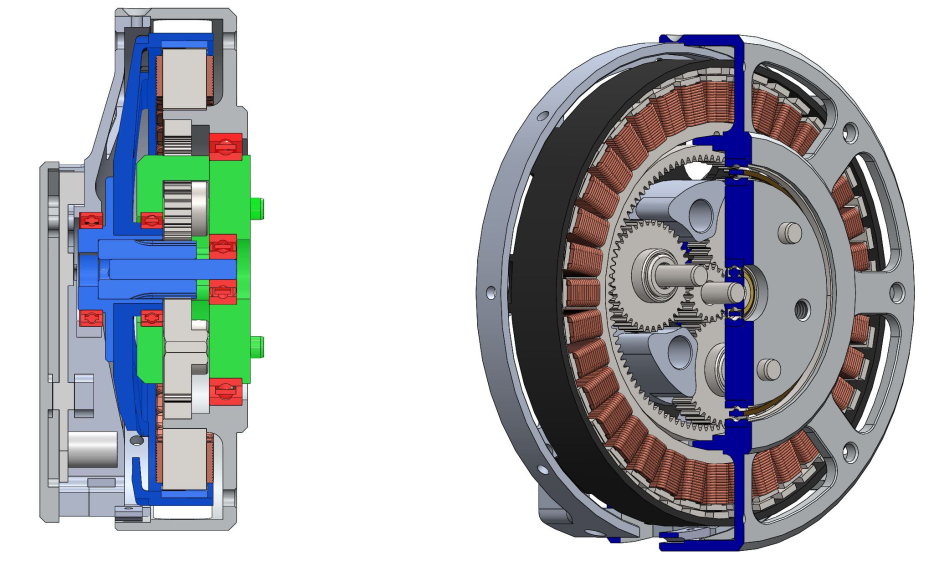
MIT Cheetah
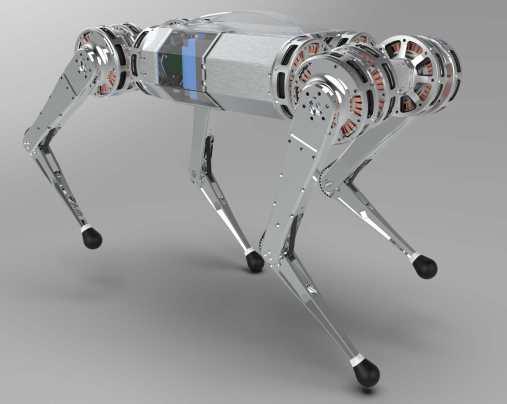
详细介绍了用于高动态机器人的低成本模块化执行器的硬件和控制开发。一个12自由度的小型四足机器人已经使用这些驱动器建造,并在其上进行了一些控制实验。尽管致动器的成本相对较低,但对于如此规模和自由度的机器人来说,四足动物表现出了前所未有的动态行为,例如机器人站在平地上360度后仰。还讨论了这些执行器的其他几种实现,包括交互操作和触觉反馈系统以及一个 6 自由度下肢双足机器人。
执行机构如下,包含行星减速器
MIT Cheetah Mini 开源项目地址(GitHub)
Benjamin G. Katz的论文:用于动力机器人的低成本模块化执行器(Mini Cheetah)
MIT仿生学机器人实验室(MIT Biomimetic Robotics Lab)
MIT Cheetah 3: Design and Control of a Robust, Dynamic Quadruped Robot
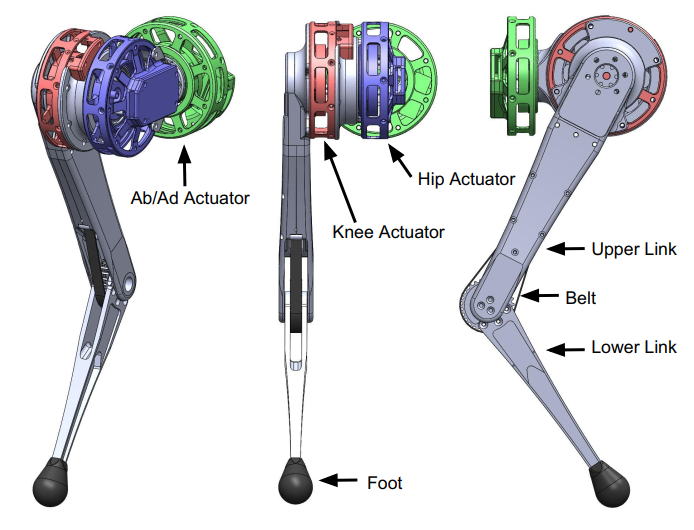
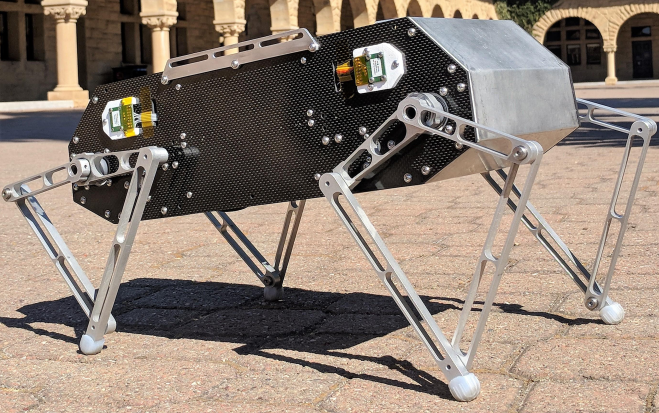
斯坦福Doggo
论文:Stanford Doggo: An Open-Source, Quasi-Direct-Drive Quadruped. Nathan Kau, Aaron Schultz, Natalie Ferrante, Patrick Slade
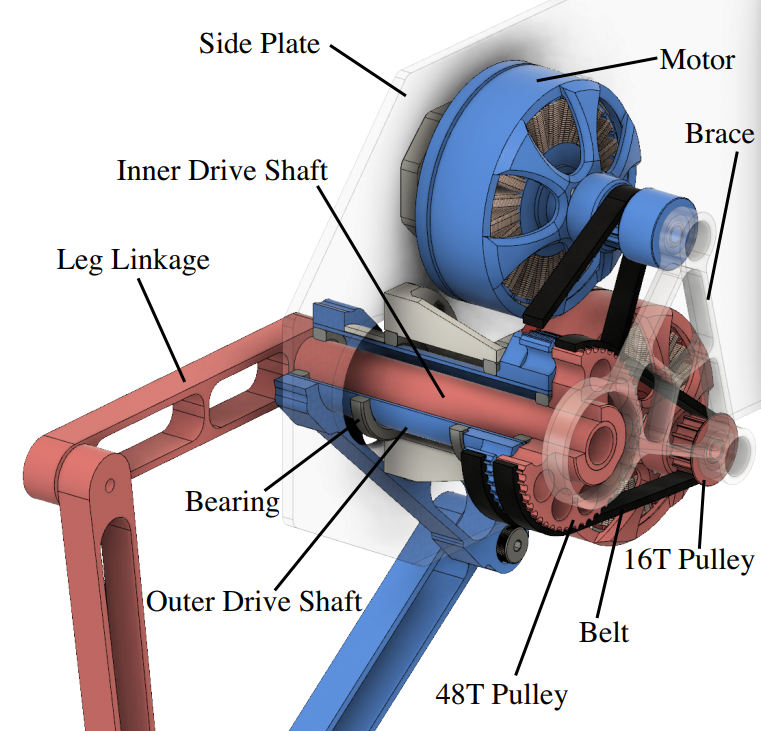
将机械部件组装在一个支腿上,红色和蓝色表示对应于从电机到支腿连杆的一个皮带传动的部件
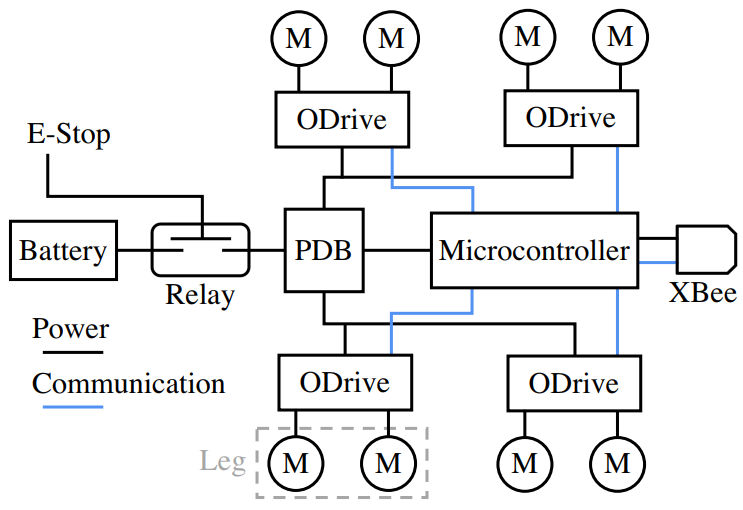
电机控制和电源系统的电气图
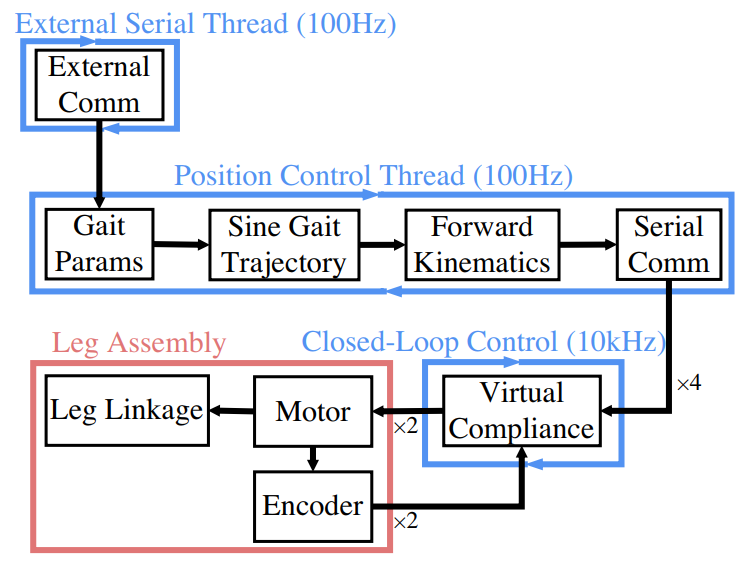
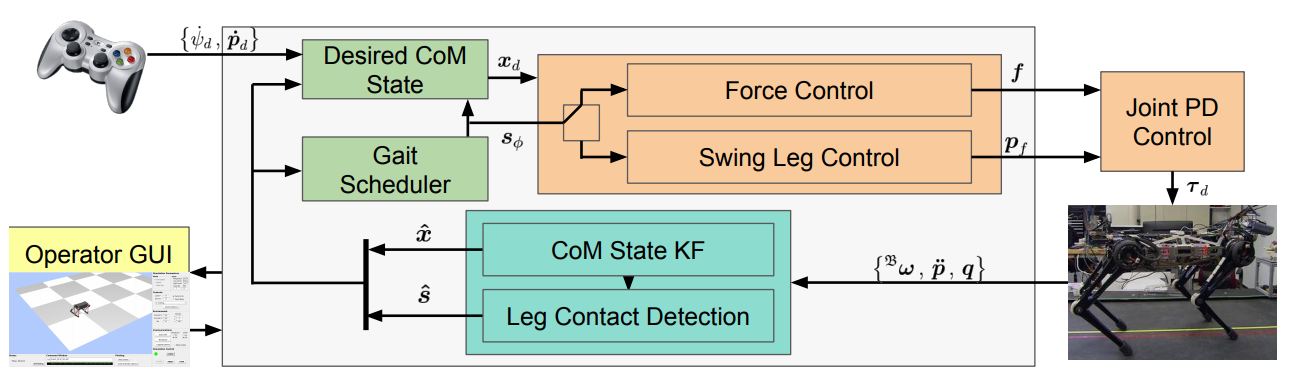
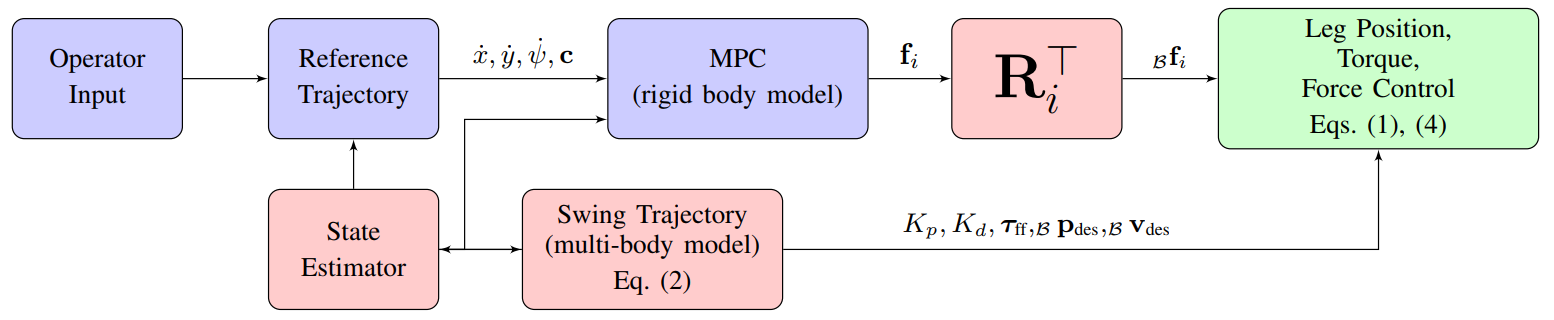
Stanford Doggo的控制框架
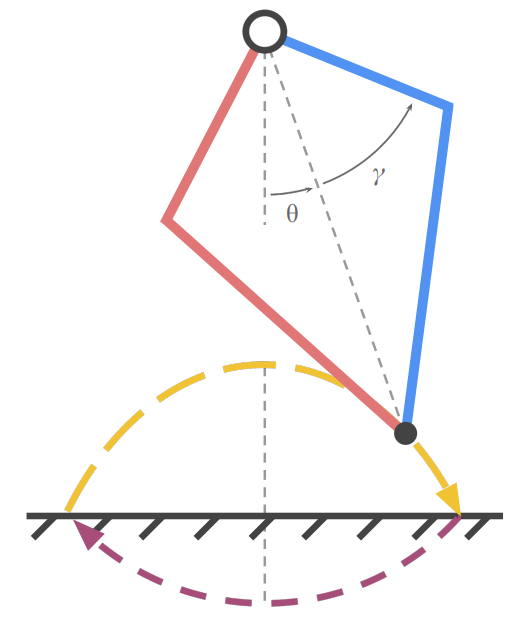
分段正弦波通过改变腿的相对振幅、频率、步幅和虚拟顺应性来设计不同的步态。
小米CyberDog
https://www.mi.com/cyberdog/specs

小米CyberDog 铁蛋 开源代码地址(GitLab)
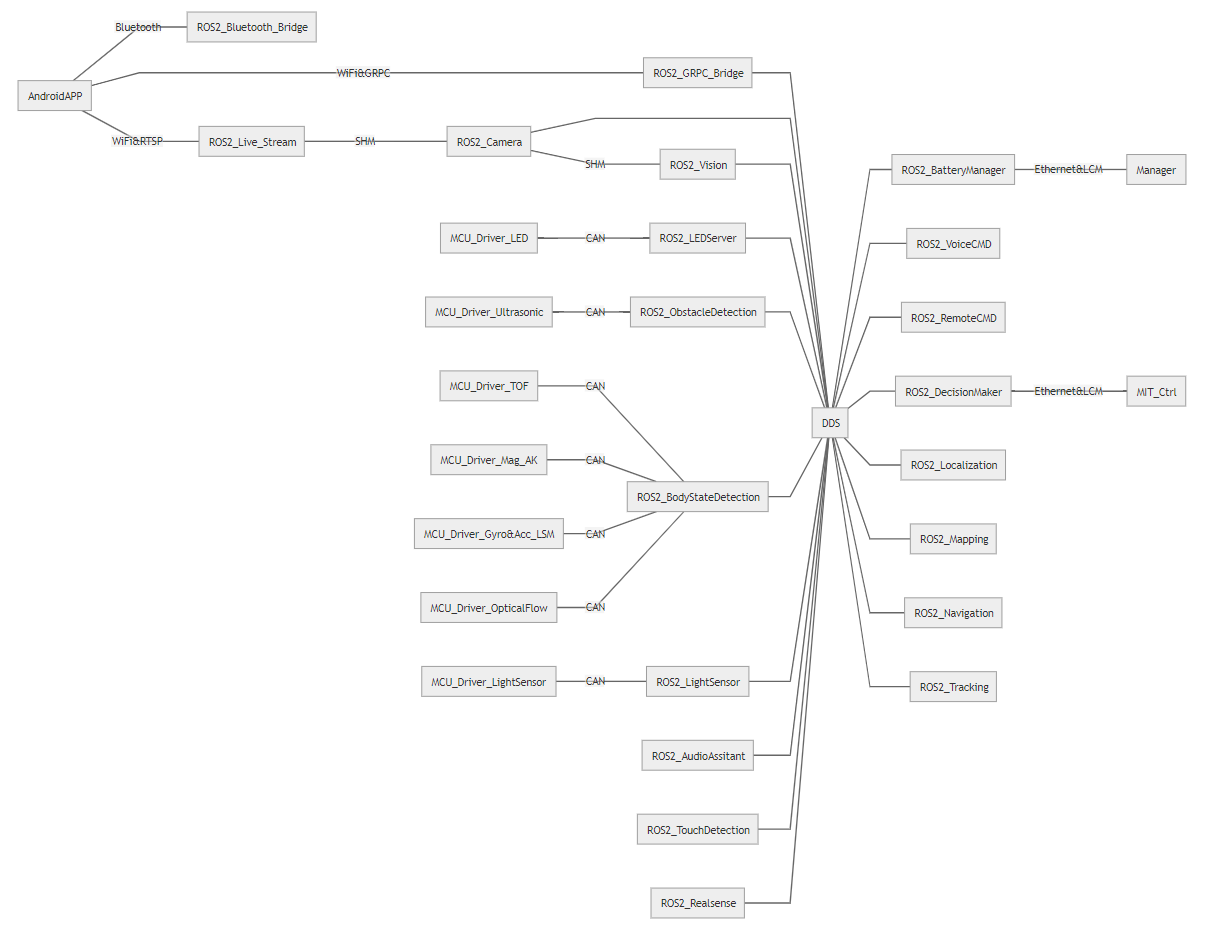
ROS系统架构
其他资料
莲动力-开源四足机器人项目:https://zhuanlan.zhihu.com/p/380091539
华北舵狗王-四足机器人学习硬干货专栏:https://www.zhihu.com/people/golaced

 浙公网安备 33010602011771号
浙公网安备 33010602011771号