S120通讯报文应用类型及区别,PZD格式及意义 | 标准报文1/2/3/4/5/6/7/9/20/81/82/83,西门子报文
一.报文功能图
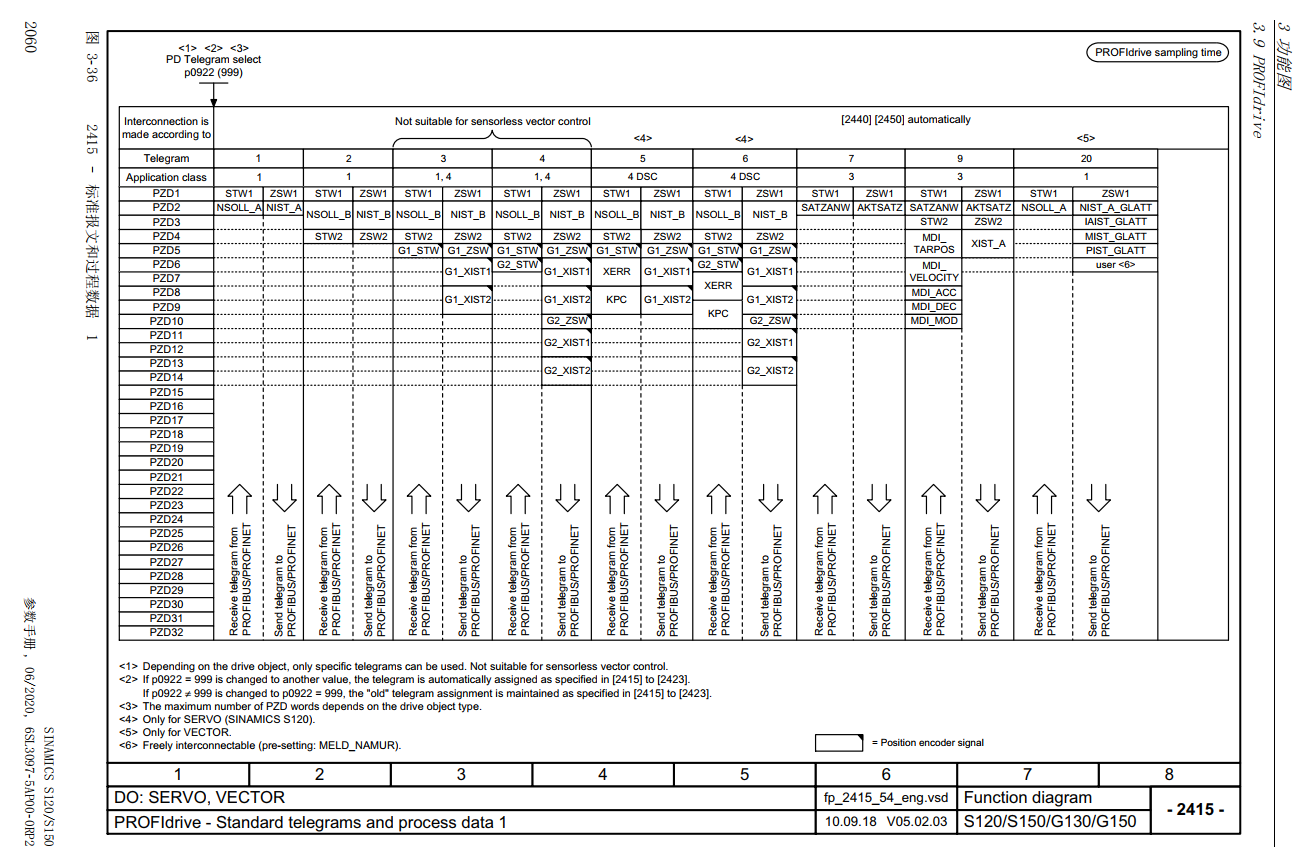
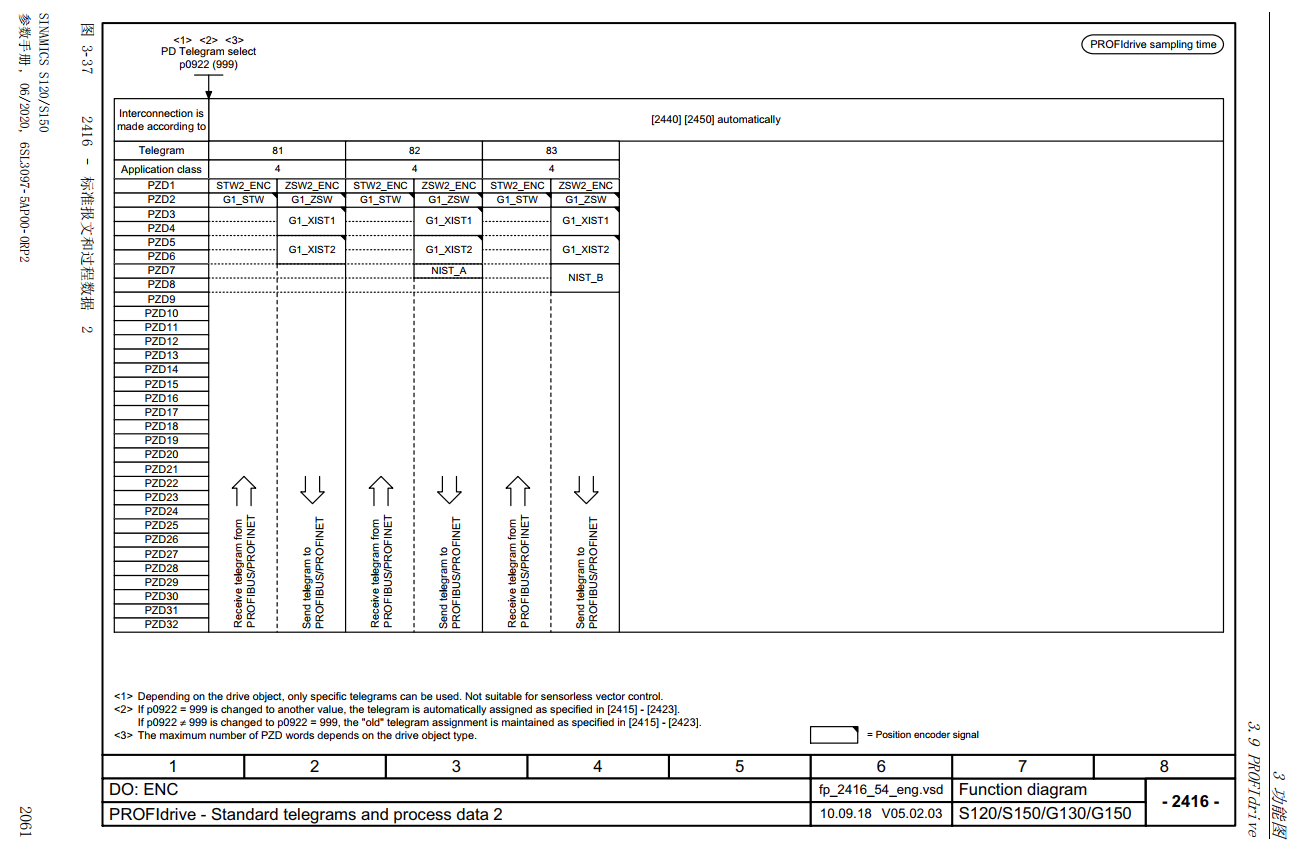
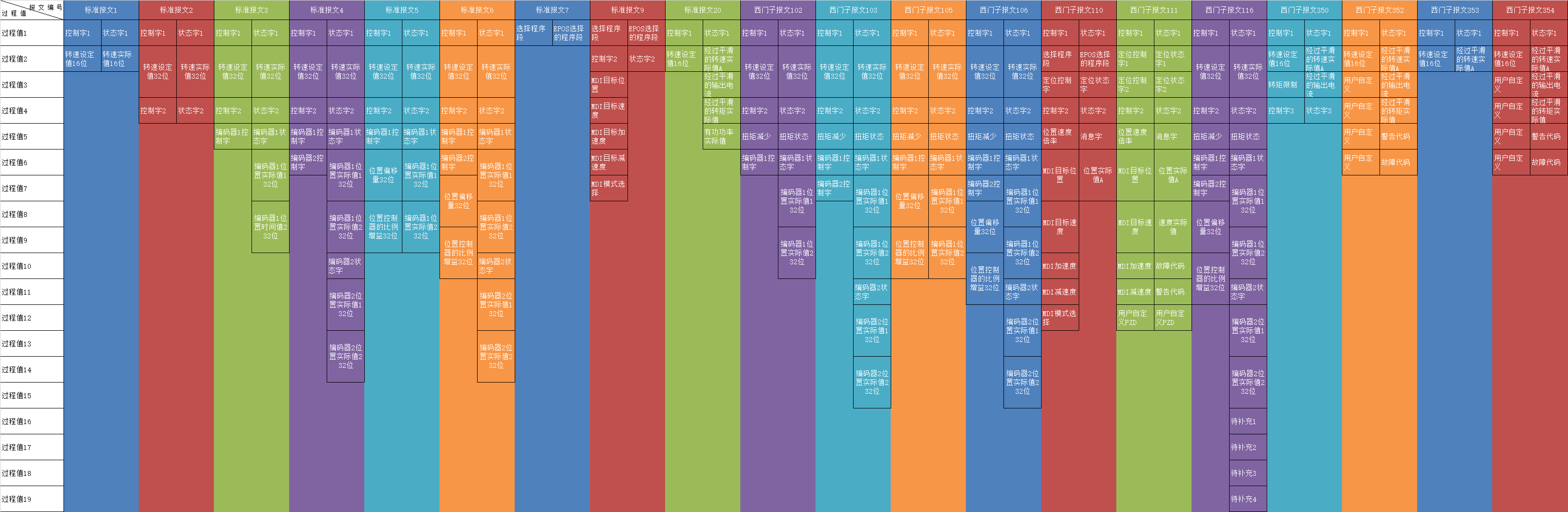
1.1标准报文
适用于驱动器
SINAMICS S120 S150 参数手册 章节3.9 PROFIdrive 图3-36 功能图2415标准报文和过程数据1
SINAMICS S120 S150 参数手册 章节3.9 PROFIdrive 图3-37 功能图2416标准报文和过程数据2
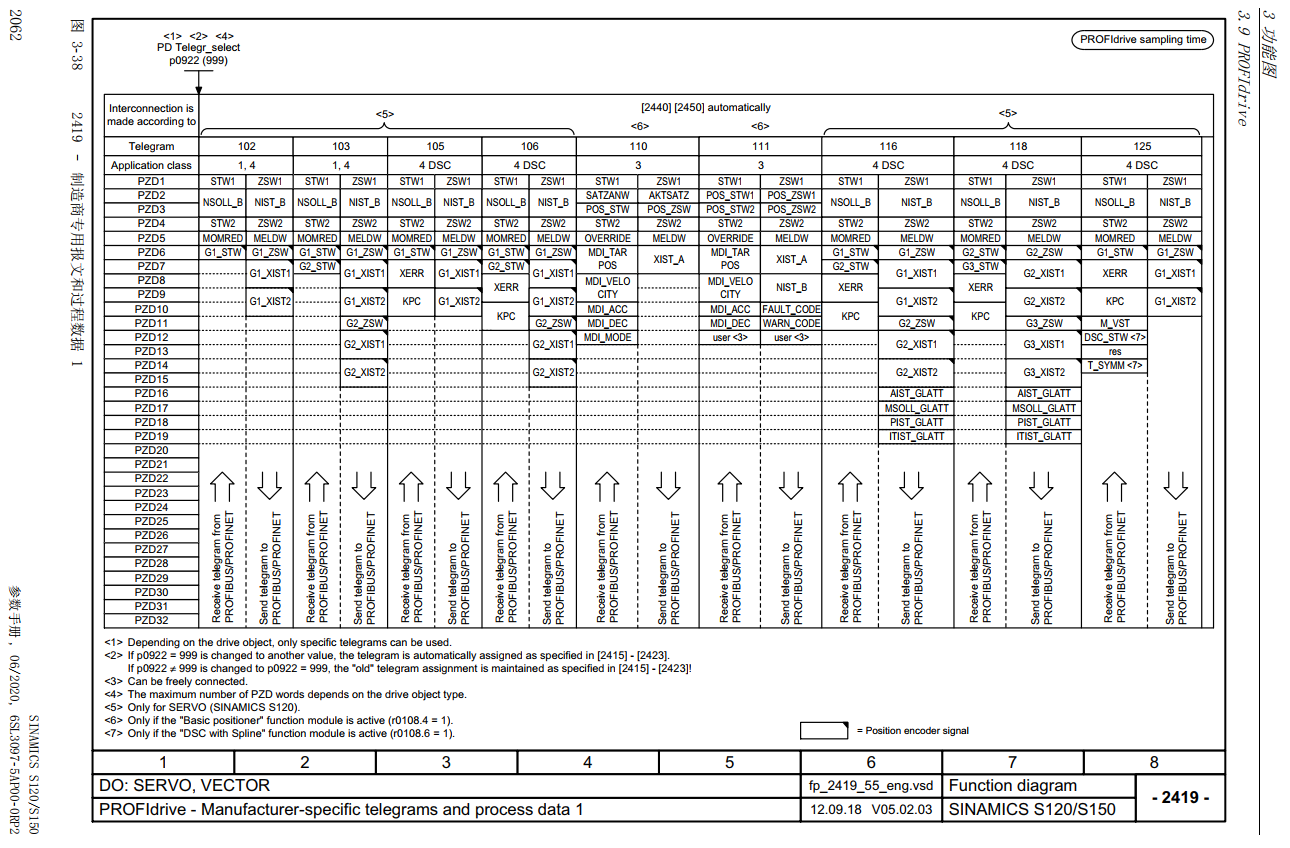
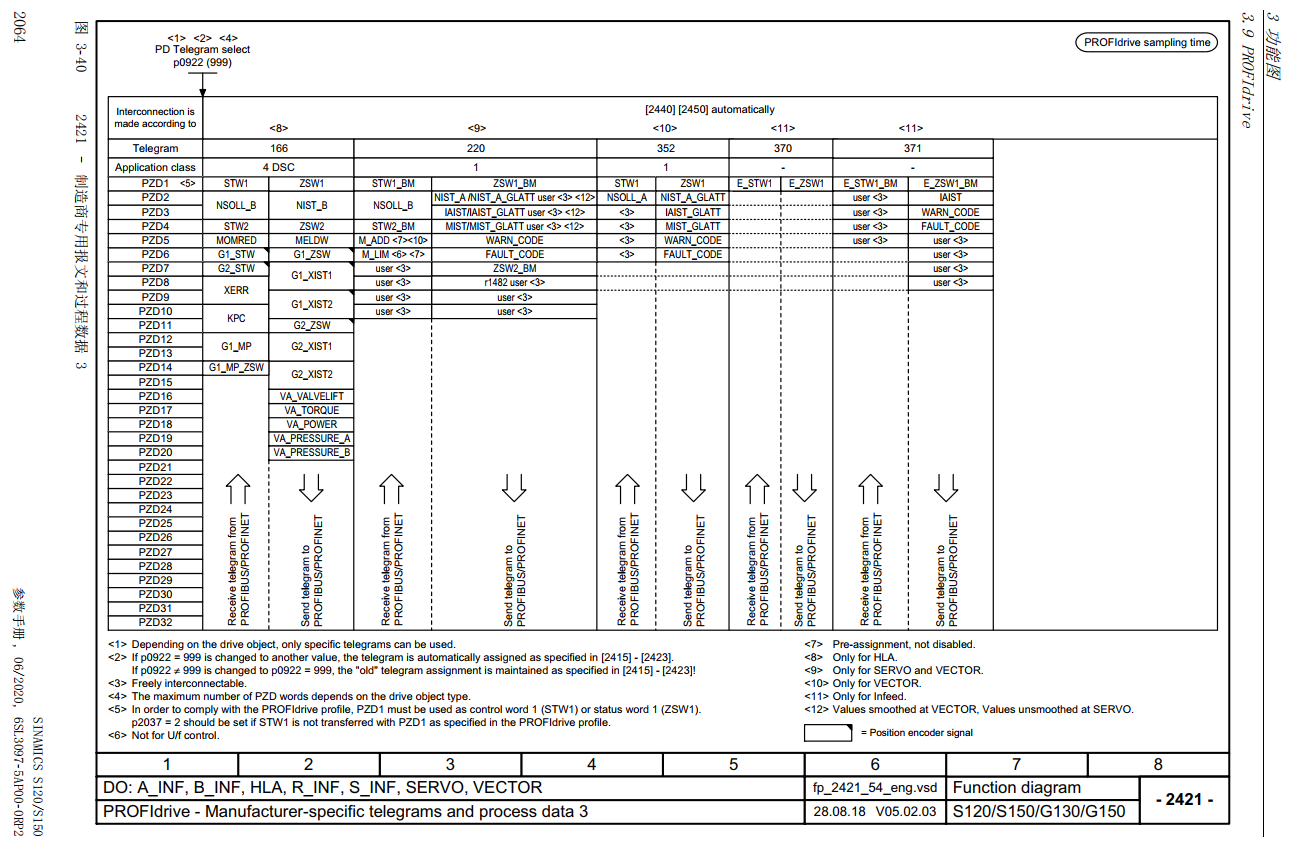
1.2西门子报文105等
适用于驱动器
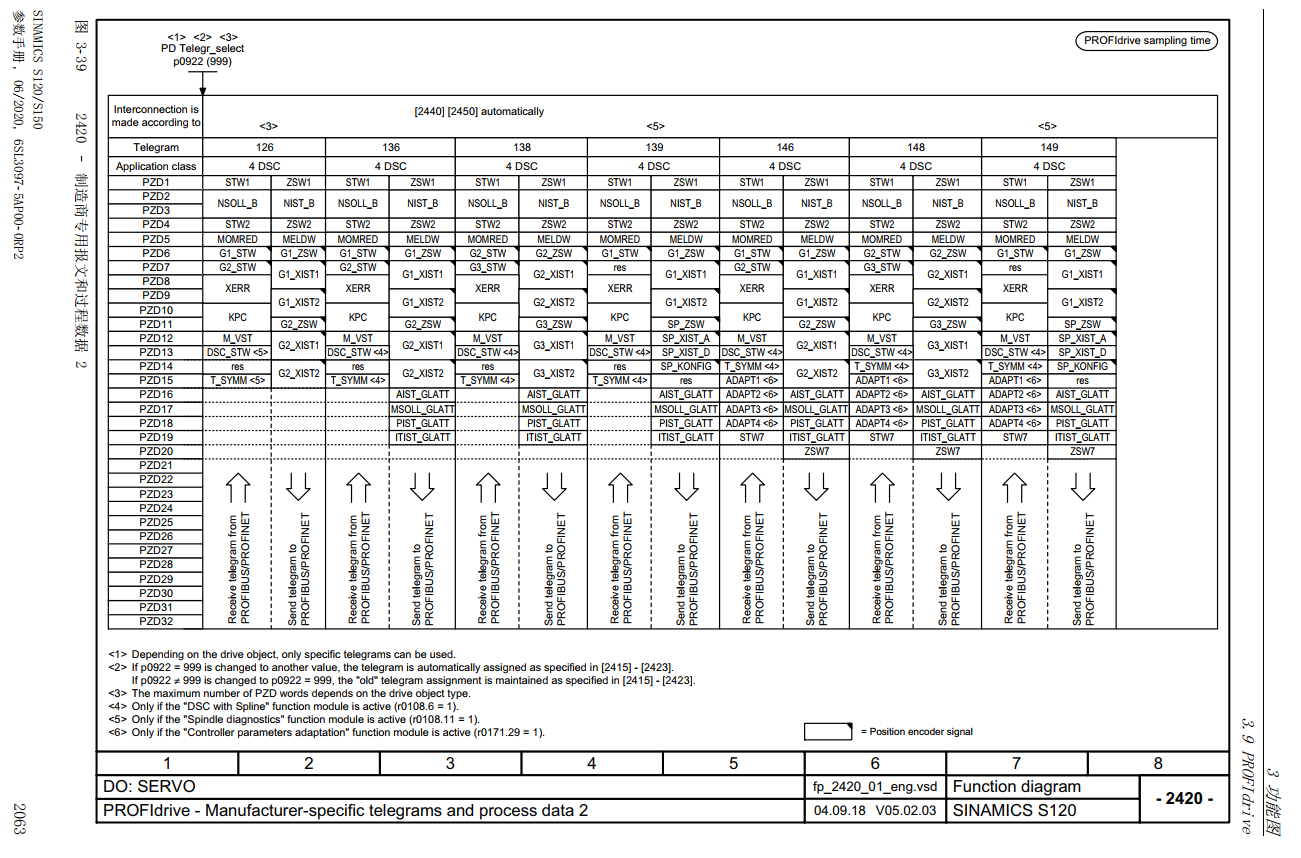
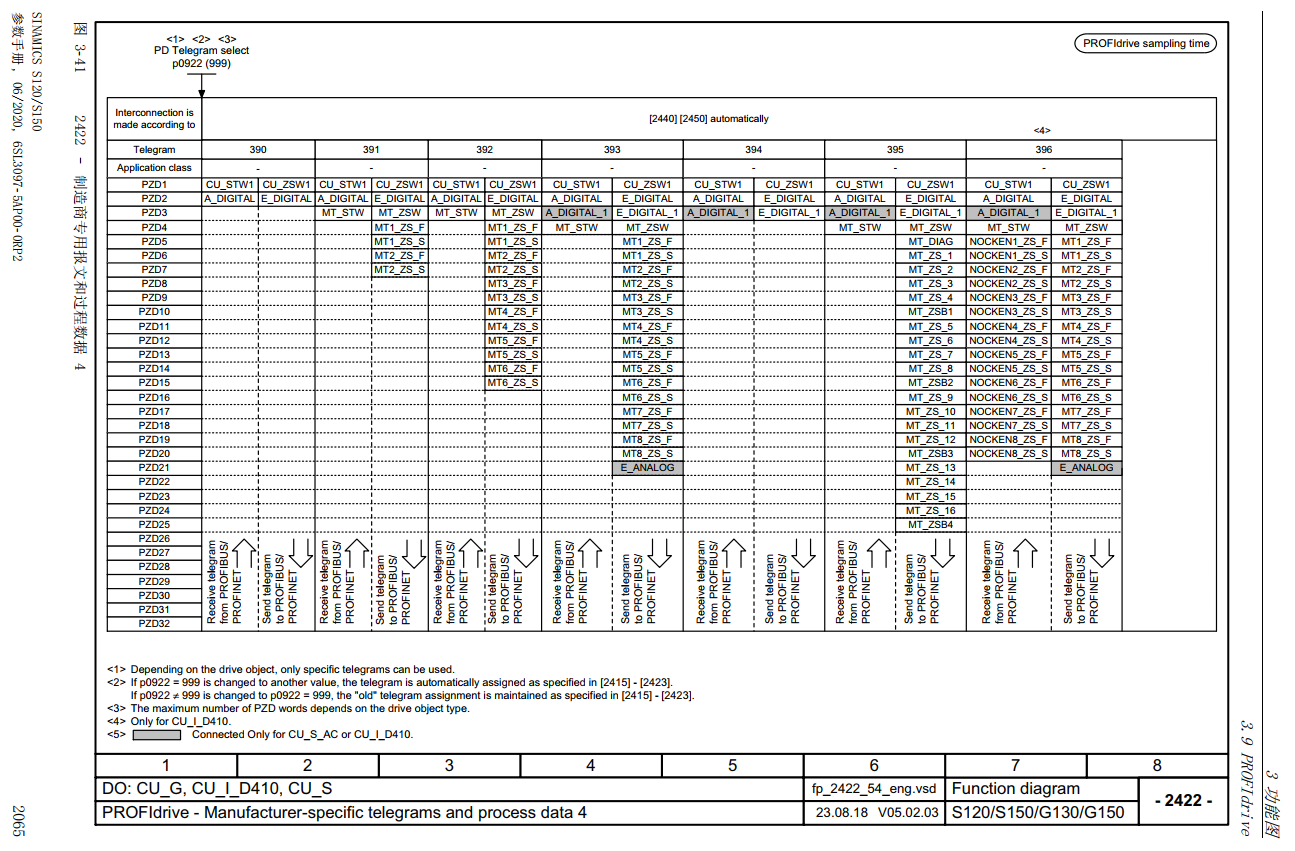
1.3报文390等
适用于运动控制单元
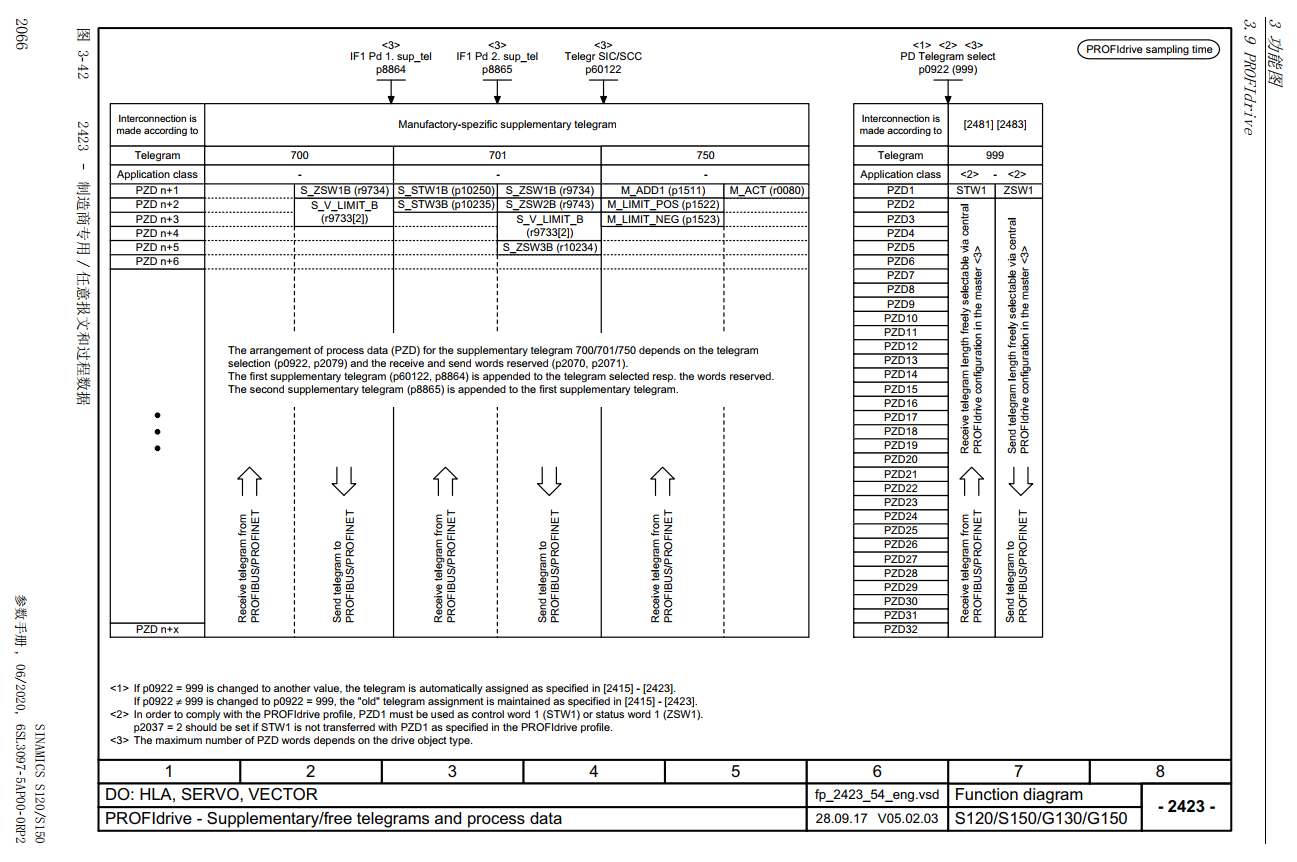
1.4自由报文999等
二.功能图解释
2.1PZD
PZD(Process data,过程数据)区域可以通过相关参数依靠BICO连接来实现简单的数据传输,比如r2050是DP通信时变频器收到的PZD数据,P2051可以设置DP通信中变频器发送的数据。
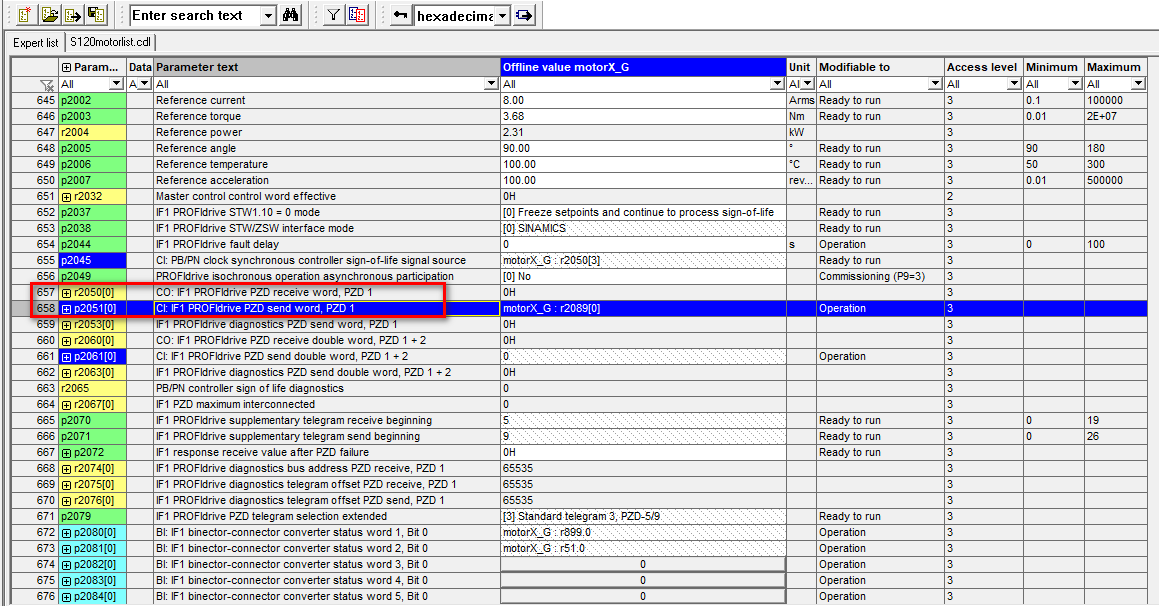
变频器的启停、正反转、速度给定属于过程数据,是通过PZD来给定的,PZD的第一个字默认为控制字,第二个字默认为频率设定值,这是通过BICO参数连接r2090各个位,和r2050[1]来实现的。比如设置P0700=6和P1000=6后,P0840(ON/OFF1命令)自动变为2090.0,P1070(主设定值)自动变为2050.1。
变频器的速度实际值默认为发送的PZD的第二个字,可以看到P2051[1]=21。其他的可以自己连接,比如P2051[2]=27(PZD3发送电流),P2051[3]=25(PZD4发送输出电压),P2051[4]=31(PZD5发送转矩),P2051[5]=947.0(PZD6发送当前故障代码)。这些BICO数据可以直接用PZD发送,用到多少PZD就设置/组态多少就行。在PLC收到的数据中是按照P2051的下标顺序一一对应的。
2.2驱动类型
1:速度控制
2:速度控制
3:速度/位置控制
4:DSC,Dynamic Servo Control,动态伺服控制
参考
网友整理的报文解释
http://www.ad.siemens.com.cn/Mysupport/Api/ExplainSource.ashx?path=/club/bbs/upload/file/20210115/6374632103299294501544650.xlsx&&title=%E6%8A%A5%E6%96%87%E8%A7%A3%E9%87%8A.xlsx

 浙公网安备 33010602011771号
浙公网安备 33010602011771号