F4V3飞控接线图 | SP RACING F3飞控接线 | 使用DFU刷写betaflight固件
一、几种F4飞控介绍
下面是某宝的几种公版F4飞控
参考https://www.moz8.com/thread-90052-1-1.html?_dsign=f3a19add
1.1 标准版F4飞控


1.2 带OSD的F4飞控

 接线图
接线图
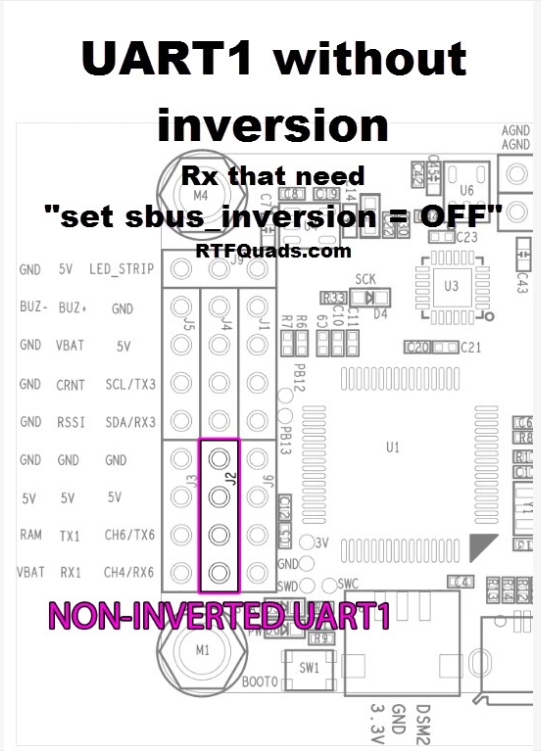
1.3 F4V3 PRO飞控
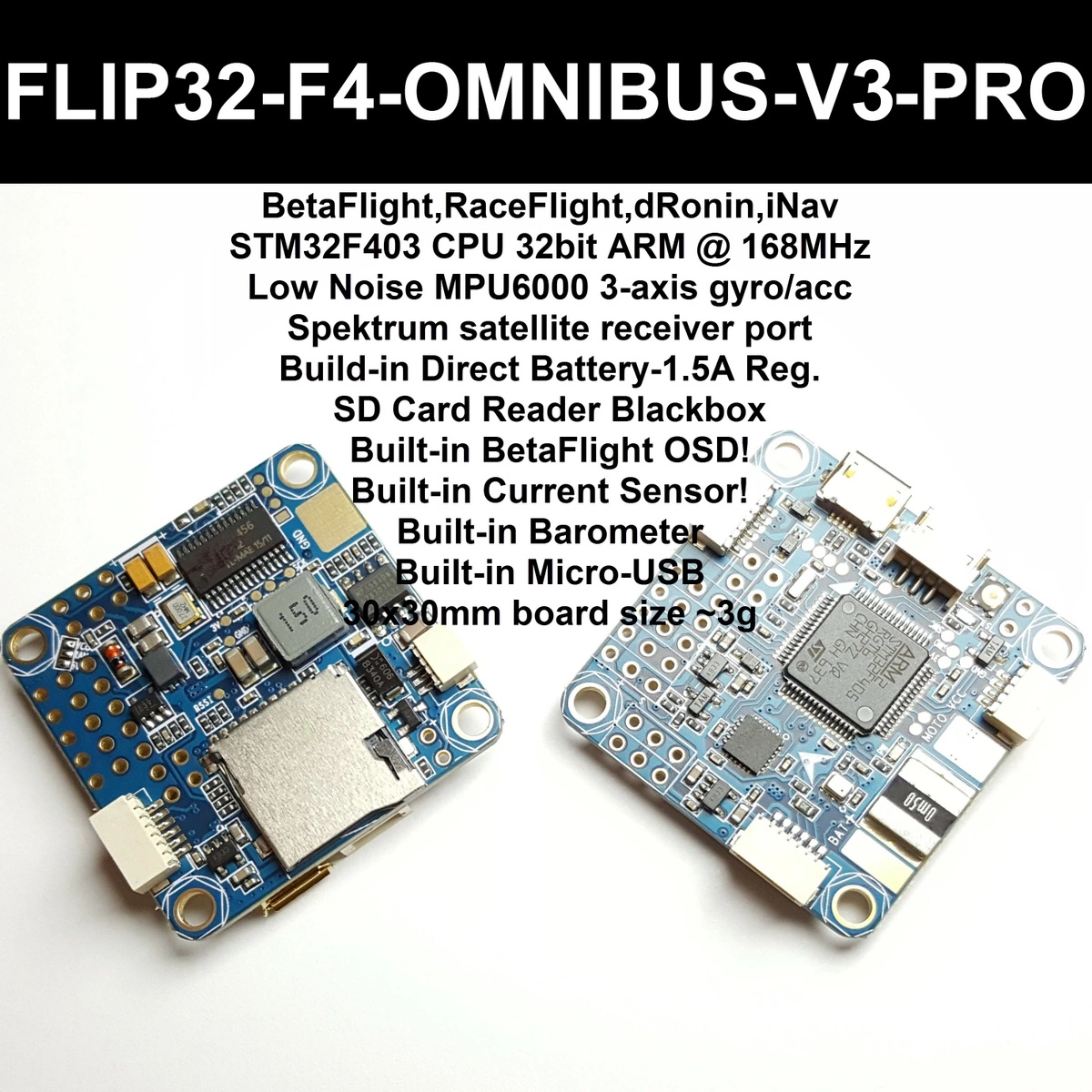
f4带osd带电流计实物图 刷OMNIBUSF4SD固件
http://www.readytoflyquads.com/flip-32-f4-omnibus-v2-pro
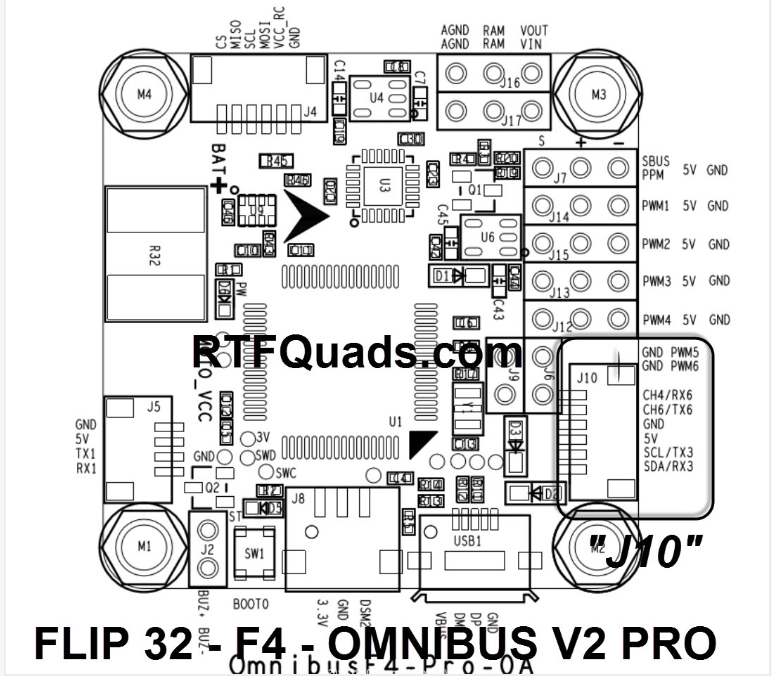
正面接线图
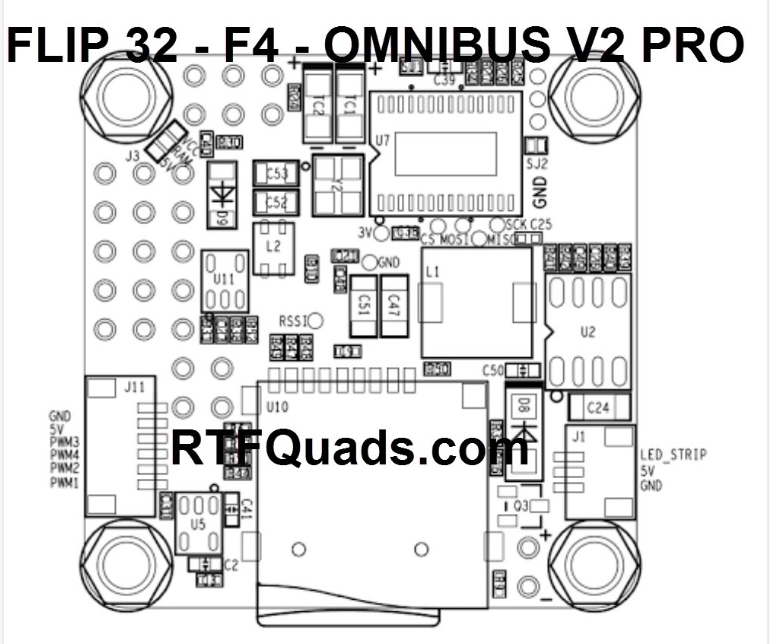
反面接线图
1.4 F4V3飞控
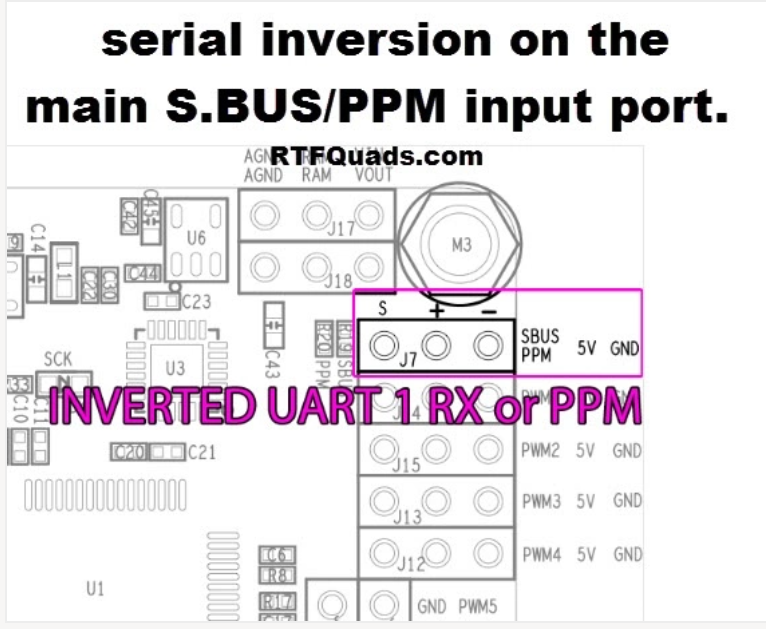
二、SP RACING F3接线
参考:https://www.jianshu.com/p/772cac6f9e6e
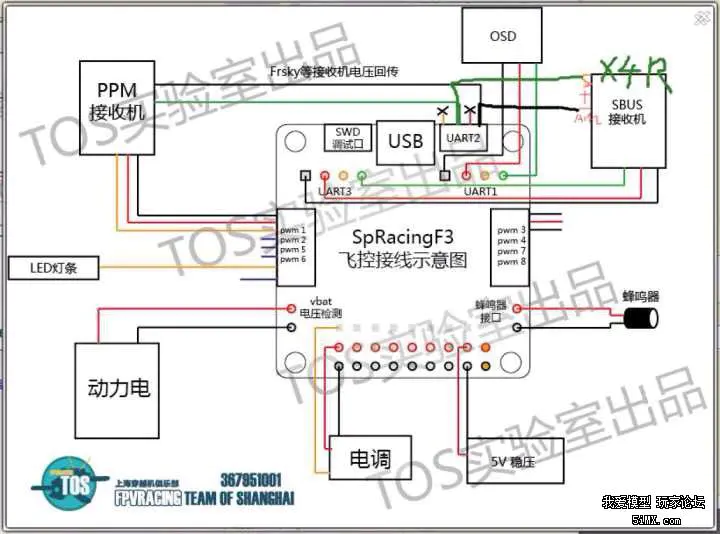
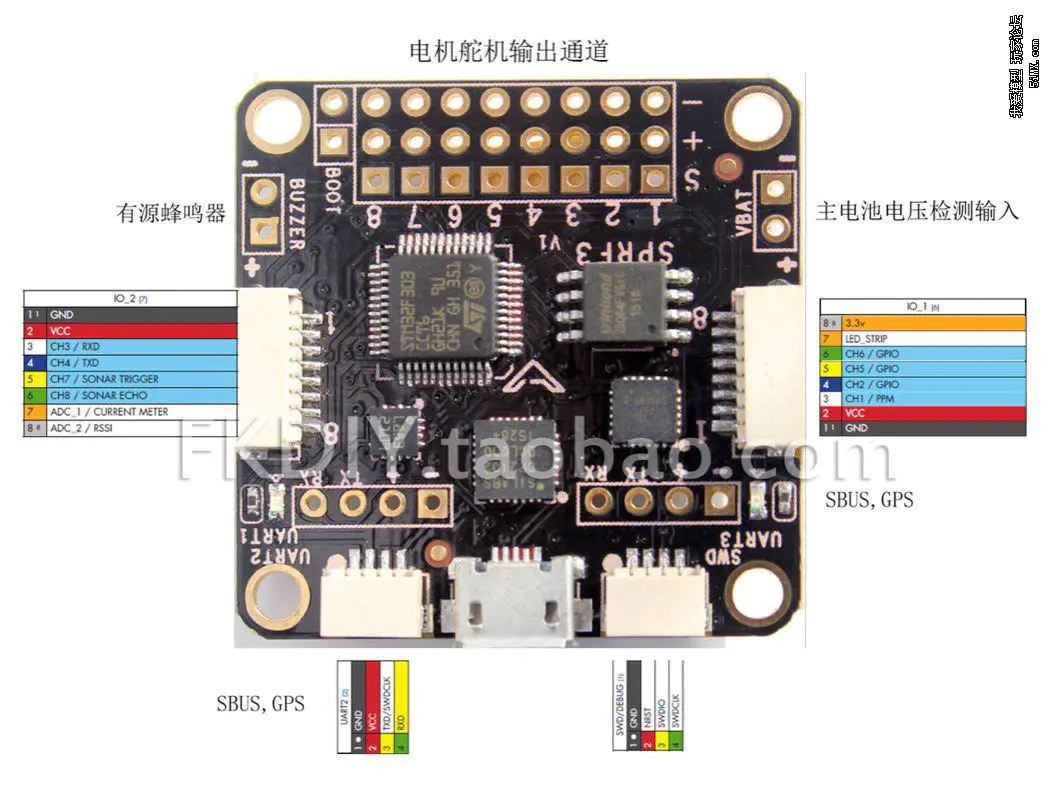
2.1 正面接线
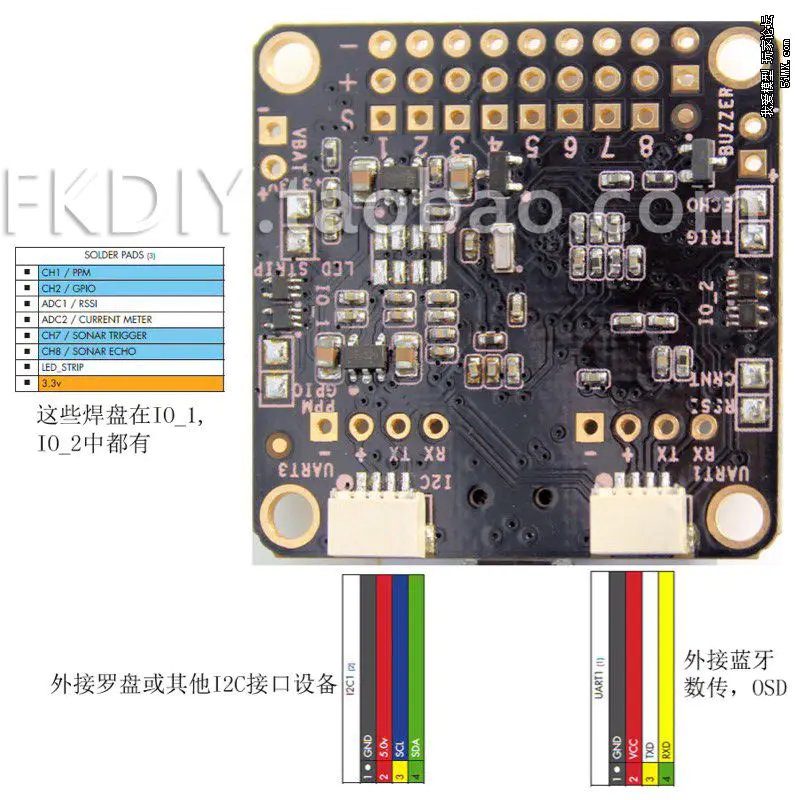
2.2 背面接线
2.3 CLI命令


# mixer mixer QUADX mmix reset smix reset # feature feature -RX_PPM feature -VBAT feature -INFLIGHT_ACC_CAL feature -RX_SERIAL feature -MOTOR_STOP feature -SERVO_TILT feature -SOFTSERIAL feature -GPS feature -FAILSAFE feature -SONAR feature -TELEMETRY feature -CURRENT_METER feature -3D feature -RX_PARALLEL_PWM feature -RX_MSP feature -RSSI_ADC feature -LED_STRIP feature -DISPLAY feature -ONESHOT125 feature -BLACKBOX feature -CHANNEL_FORWARDING feature VBAT feature INFLIGHT_ACC_CAL feature RX_SERIAL feature MOTOR_STOP feature FAILSAFE feature BLACKBOX # map map AETR1234 # serial serial 0 1 115200 57600 0 115200 serial 1 0 115200 57600 0 115200 serial 2 64 115200 57600 0 115200 # led led 0 15,15:ES:IA:0 led 1 15,8:E:WF:0 led 2 15,7:E:WF:0 led 3 15,0:NE:IA:0 led 4 8,0:N:F:0 led 5 7,0:N:F:0 led 6 0,0:NW:IA:0 led 7 0,7:W:WF:0 led 8 0,8:W:WF:0 led 9 0,15:SW:IA:0 led 10 7,15:S:WF:0 led 11 8,15:S:WF:0 led 12 7,7:U:WF:0 led 13 8,7:U:WF:0 led 14 7,8:D:WF:0 led 15 8,8:D:WF:0 led 16 8,9::R:3 led 17 9,10::R:3 led 18 10,11::R:3 led 19 10,12::R:3 led 20 9,13::R:3 led 21 8,14::R:3 led 22 7,14::R:3 led 23 6,13::R:3 led 24 5,12::R:3 led 25 5,11::R:3 led 26 6,10::R:3 led 27 7,9::R:3 led 28 0,0:::0 led 29 0,0:::0 led 30 0,0:::0 led 31 0,0:::0 # color color 0 0,0,0 color 1 0,255,255 color 2 0,0,255 color 3 30,0,255 color 4 60,0,255 color 5 90,0,255 color 6 120,0,255 color 7 150,0,255 color 8 180,0,255 color 9 210,0,255 color 10 240,0,255 color 11 270,0,255 color 12 300,0,255 color 13 330,0,255 color 14 0,0,0 color 15 0,0,0 set emf_avoidance = OFF set mid_rc = 1500 set min_check = 1100 set max_check = 1900 set rssi_channel = 0 set rssi_scale = 30 set rssi_ppm_invert = OFF set input_filtering_mode = OFF set rc_smoothing = OFF set rc_fpv_cam_correct_degrees = 0 set min_throttle = 1190 set max_throttle = 2000 set min_command = 1000 set servo_center_pulse = 1500 set 3d_deadband_low = 1406 set 3d_deadband_high = 1514 set 3d_neutral = 1460 set 3d_deadband_throttle = 50 set enable_fast_pwm = OFF set motor_pwm_rate = 400 set servo_pwm_rate = 50 set disarm_kill_switch = ON set auto_disarm_delay = 30 set small_angle = 25 set fixedwing_althold_dir = 1 set reboot_character = 82 set gps_provider = NMEA set gps_sbas_mode = AUTO set gps_auto_config = ON set gps_auto_baud = OFF set serialrx_provider = SBUS set spektrum_sat_bind = 0 set telemetry_switch = OFF set telemetry_inversion = ON set frsky_default_lattitude = 0.000 set frsky_default_longitude = 0.000 set frsky_coordinates_format = 0 set frsky_unit = IMPERIAL set frsky_vfas_precision = 0 set hott_alarm_sound_interval = 5 set battery_capacity = 0 set vbat_scale = 110 set vbat_max_cell_voltage = 43 set vbat_min_cell_voltage = 33 set vbat_warning_cell_voltage = 35 set current_meter_scale = 400 set current_meter_offset = 0 set multiwii_current_meter_output = OFF set current_meter_type = ADC set align_gyro = DEFAULT set align_acc = DEFAULT set align_mag = DEFAULT set align_board_roll = 0 set align_board_pitch = 0 set align_board_yaw = 0 set max_angle_inclination = 700 set gyro_lpf = 188HZ set moron_threshold = 32 set imu_dcm_kp = 2500 set imu_dcm_ki = 0 set yaw_control_direction = 1 set yaw_motor_direction = 1 set yaw_jump_prevention_limit = 200 set tri_unarmed_servo = ON set servo_lowpass_freq = 400 set servo_lowpass_enable = OFF set failsafe_delay = 10 set failsafe_off_delay = 10 set failsafe_throttle = 1000 set failsafe_kill_switch = OFF set failsafe_throttle_low_delay = 100 set rx_min_usec = 885 set rx_max_usec = 2115 set acc_hardware = 0 set baro_hardware = 0 set mag_hardware = 0 set blackbox_rate_num = 1 set blackbox_rate_denom = 1 set blackbox_device = SPIFLASH set beeper_off_flags = 0 set magzero_x = 0 set magzero_y = 0 set magzero_z = 0 # rxfail rxfail 0 a rxfail 1 a rxfail 2 a rxfail 3 a rxfail 4 h rxfail 5 h rxfail 6 h rxfail 7 h rxfail 8 h rxfail 9 h rxfail 10 h rxfail 11 h rxfail 12 h rxfail 13 h rxfail 14 h rxfail 15 h rxfail 16 h rxfail 17 h # dump profile # profile profile 0 # aux aux 0 0 0 1675 2100 aux 1 1 1 1725 2100 aux 2 0 0 900 900 aux 3 0 0 900 900 aux 4 0 0 900 900 aux 5 0 0 900 900 aux 6 0 0 900 900 aux 7 0 0 900 900 aux 8 0 0 900 900 aux 9 0 0 900 900 aux 10 0 0 900 900 aux 11 0 0 900 900 aux 12 0 0 900 900 aux 13 0 0 900 900 aux 14 0 0 900 900 aux 15 0 0 900 900 aux 16 0 0 900 900 aux 17 0 0 900 900 aux 18 0 0 900 900 aux 19 0 0 900 900 # adjrange adjrange 0 0 0 900 900 0 0 adjrange 1 0 0 900 900 0 0 adjrange 2 0 0 900 900 0 0 adjrange 3 0 0 900 900 0 0 adjrange 4 0 0 900 900 0 0 adjrange 5 0 0 900 900 0 0 adjrange 6 0 0 900 900 0 0 adjrange 7 0 0 900 900 0 0 adjrange 8 0 0 900 900 0 0 adjrange 9 0 0 900 900 0 0 adjrange 10 0 0 900 900 0 0 adjrange 11 0 0 900 900 0 0 # rxrange rxrange 0 1000 2000 rxrange 1 1000 2000 rxrange 2 1000 2000 rxrange 3 1000 2000 # servo servo 0 1000 2000 1500 90 90 100 -1 servo 1 1000 2000 1500 90 90 100 -1 servo 2 1000 2000 1500 90 90 100 -1 servo 3 1000 2000 1500 90 90 100 -1 servo 4 1000 2000 1500 90 90 100 -1 servo 5 1000 2000 1500 90 90 100 -1 servo 6 1000 2000 1500 90 90 100 -1 servo 7 1000 2000 1500 90 90 100 -1 set gps_pos_p = 15 set gps_pos_i = 0 set gps_pos_d = 0 set gps_posr_p = 34 set gps_posr_i = 14 set gps_posr_d = 53 set gps_nav_p = 25 set gps_nav_i = 33 set gps_nav_d = 83 set gps_wp_radius = 200 set nav_controls_heading = ON set nav_speed_min = 100 set nav_speed_max = 300 set nav_slew_rate = 30 set gtune_loP_rll = 10 set gtune_loP_ptch = 10 set gtune_loP_yw = 10 set gtune_hiP_rll = 100 set gtune_hiP_ptch = 100 set gtune_hiP_yw = 100 set gtune_pwr = 0 set gtune_settle_time = 450 set gtune_average_cycles = 16 set alt_hold_deadband = 40 set alt_hold_fast_change = ON set deadband = 0 set yaw_deadband = 0 set throttle_correction_value = 0 set throttle_correction_angle = 800 set default_rate_profile = 0 set gimbal_mode = NORMAL set acc_cut_hz = 15 set accxy_deadband = 40 set accz_deadband = 40 set accz_lpf_cutoff = 5.000 set acc_unarmedcal = ON set acc_trim_pitch = 0 set acc_trim_roll = 0 set baro_tab_size = 21 set baro_noise_lpf = 0.600 set baro_cf_vel = 0.985 set baro_cf_alt = 0.965 set mag_declination = 0 set pid_controller = LUX set p_pitch = 50 set i_pitch = 30 set d_pitch = 20 set p_roll = 40 set i_roll = 30 set d_roll = 13 set p_yaw = 100 set i_yaw = 50 set d_yaw = 5 set p_pitchf = 0.900 set i_pitchf = 0.180 set d_pitchf = 0.015 set p_rollf = 0.900 set i_rollf = 0.180 set d_rollf = 0.015 set p_yawf = 2.000 set i_yawf = 0.250 set d_yawf = 0.015 set level_horizon = 6.000 set level_angle = 6.000 set sensitivity_horizon = 75 set p_alt = 50 set i_alt = 0 set d_alt = 0 set p_level = 50 set i_level = 50 set d_level = 100 set p_vel = 120 set i_vel = 45 set d_vel = 1 set gyro_lpf_hz = 60 set dterm_lpf_hz = 50 set insane_acro_factor = 0 # dump rates # rateprofile rateprofile 0 set rc_rate = 100 set rc_expo = 70 set rc_yaw_expo = 20 set thr_mid = 50 set thr_expo = 0 set roll_rate = 70 set pitch_rate = 70 set yaw_rate = 70 set tpa_rate = 30 set tpa_breakpoint = 1450 save
NAZE命令
# resource resource BEEPER 1 A12 resource MOTOR 1 A08 resource MOTOR 2 A11 resource PPM 1 A00 resource PWM 1 A00 resource PWM 2 A01 resource PWM 3 A02 resource PWM 4 A03 resource PWM 5 A06 resource PWM 6 A07 resource PWM 7 B00 resource PWM 8 B01 resource LED_STRIP 1 A06 resource SERIAL_TX 1 A09 resource SERIAL_TX 2 A02 resource SERIAL_TX 11 A07 resource SERIAL_TX 12 B01 resource SERIAL_RX 1 A10 resource SERIAL_RX 2 A03 resource SERIAL_RX 11 A06 resource SERIAL_RX 12 B00 resource INVERTER 2 B02 resource I2C_SCL 1 B08 resource I2C_SCL 2 B10 resource I2C_SDA 1 B09 resource I2C_SDA 2 B11 resource LED 1 B03 resource LED 2 B04 resource SPI_SCK 2 B13 resource SPI_MISO 2 B14 resource SPI_MOSI 2 B15 resource ADC_BATT 1 A04 resource ADC_RSSI 1 A01 resource ADC_CURR 1 B01 resource ADC_EXT 1 A05
三、使用DFU模式刷写BF固件
参考: https://www.bilibili.com/read/cv665032/
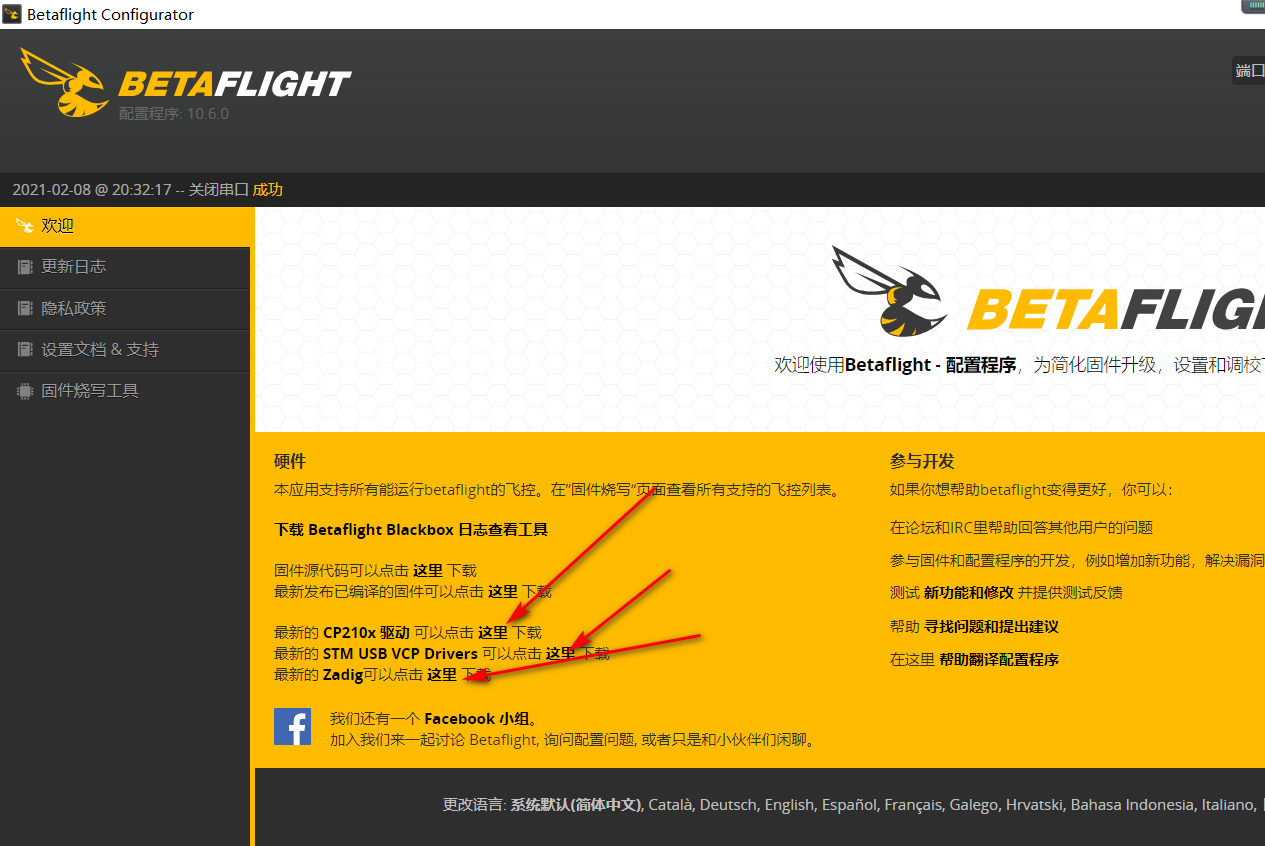
3.1 下载CP2102、VCP、Zadig
第一步 确保你已经下载了地面站首页的这三个东西~
3.2 进入BOOT模式
不同的飞控BOOT进入方法略有不同,有些飞控有按钮进行短接,有些则需要手动短接,不过多数都为在短接BOOT后将飞控连接至计算机即可
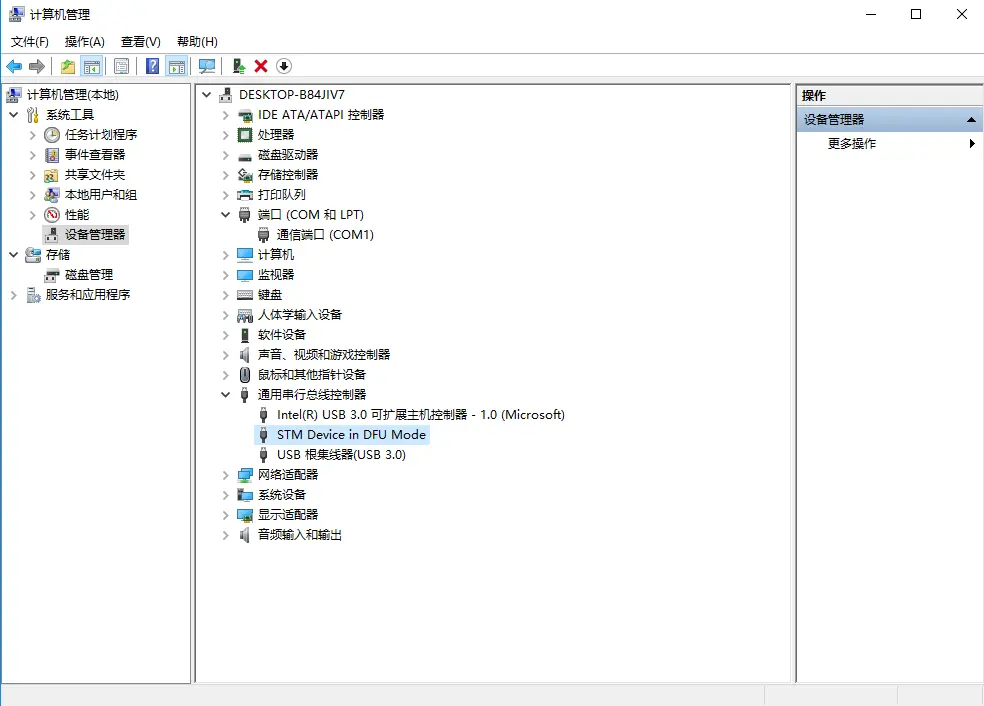
进入BOOT后,电脑识别飞控为STM设备的DFU(Device Firmware Upgrade)模式
3.3 Zadig设置
打开你的一开始在地面站首页下载的 Zading
在Options里打开List All Devices

选择列出所有设备
选择你的飞控设备 一般识别成STM32 BOOTLOADER的就是了
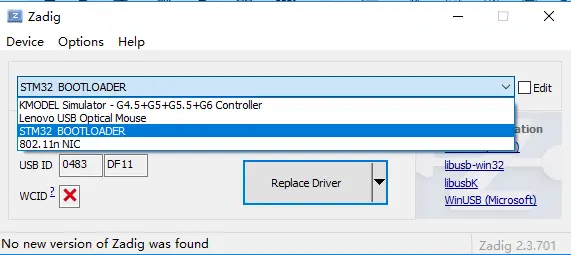
Replace Driver
直到出现窗口提示安装成功
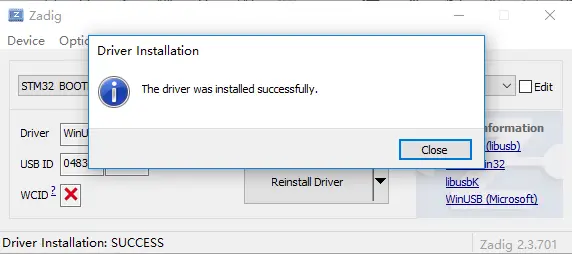
好的 到这里你的飞控连接电脑所需的驱动就已经安装完毕了
接下来关闭Zading 打开BetaFlight地面站
然后将飞控断开与电脑的连接,然后再次短接BOOT口连接电脑
地面站识别为DFU时即可进行刷写
请务必注意打开“无重启序列”
刷写方法在图内已经给出~
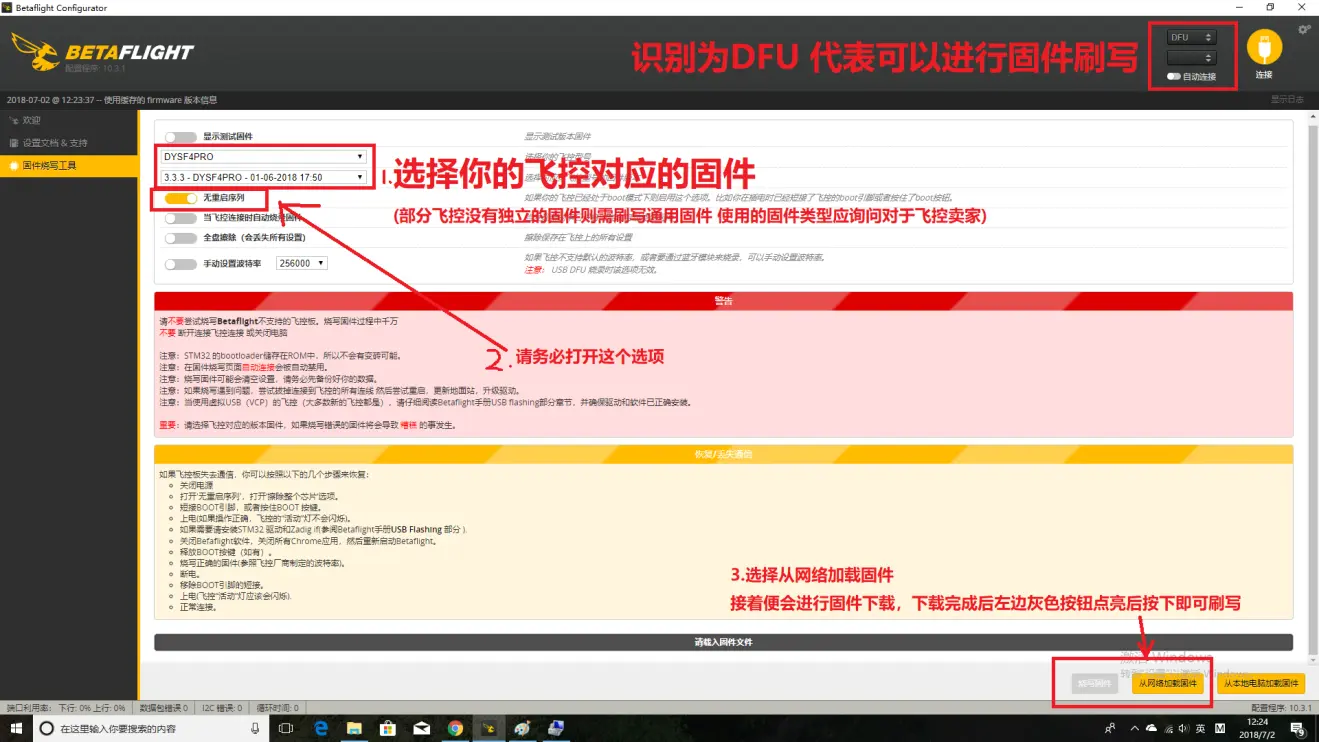
需要注意的是,因为BetaFlight为开源飞控,采用Github(一个开源代码网站)的release功能发布固件,所以当无法选择“从网络加载固件”时,可以询求其他魔友已经下载好的固件,然后使用“从本地电脑加载固件”功能进行固件的刷写。或者自行前往下载:
GitHub上的固件下载地址:https://github.com/betaflight/betaflight/releases
烧录固件过程中 请务必保持飞控与电脑处于连接状态,否则飞控有变砖的可能。
最后烧录完成后 飞控会自动重启 此时就可以直接连接进地面站 看到已经成功烧录新版的固件了。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号