一文打尽PWM协议、PPM协议、PCM协议、SBUS协议、XBUS协议、DSM协议 | STM32的通用定时器TIM3实现PPM信号输出
1. PWM协议
电机(电调)上用到PWM信号种类很多,我们这里对常见的PWM信号特征进行一个描述:
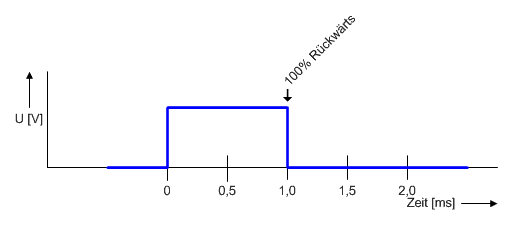
1、 PWM信号是一个周期性的方波信号,周期为20ms,也就是50Hz的刷新频率。
2、 PWM每一周期中的高电平持续时间为1~2ms(1000us~2000us),代表了油门控制量。一般四旋翼中1100us对应0油门,1900us对应满油门
2. PPM(CPPM)协议、PCM协议
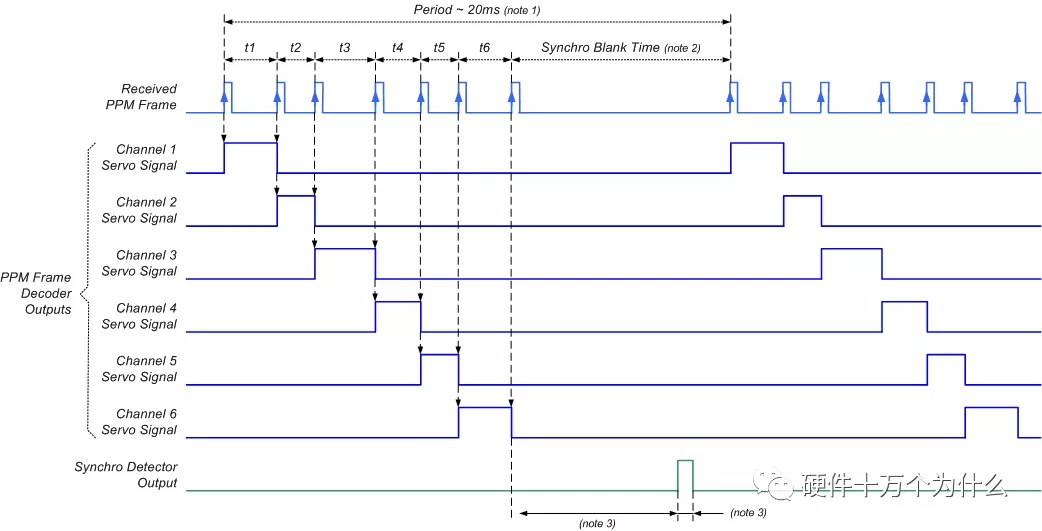
比如将两个遥控器之间连接起来的教练模式,比如遥控器接电脑玩模拟器,当然还有我们玩多轴,要将接收机的信号传输给飞控时,每个通道一组物理连线的方式就显得非常的繁琐和没有必要。这时候PPM就是救星了。
PCM(pulse-code modulation,脉冲编码调制,又称脉码调制)。这里顺便提一句,有些航模爱好者误将PPM编码说成是FM,其实这是两个不同的概念。前者指的是信号脉冲的编码方式,后者指的是高频电路的调制方式。
航模遥控器发射电路的工作原理是:通过操纵发射机上的手柄,将电位器阻值的 变化信息送入编码电路。编码电路将其转换成一组脉冲编码信号(PPM或PCM)。这组脉冲编码信号经过高频调制电路(AM或FM)调制后,再经功放电路发送出去。PPM的编解码方式一般是使用积分电路来实现的,而PCM编解码则是用模/数(A/D)和数/模(D/A)转换技术实现的。
航模遥控器中最常用的两种脉冲编码方式就是PPM和PCM;
最常用的两种高频调制方式是FM调频和AM调幅;
最常见的组合为PPM/AM脉位调制编码/调幅、PPM/FM脉位调制编码/调频、PPM/FM脉冲调制编码/调频三种形式。
通常的PPM接收解码电路都由通用的数字集成电路组成,如 CD4013,CD4015等。对于这类电路来说,只要输入脉冲的上升沿达到一定的高度,都可以使其翻转。这样,一旦输入脉冲中含有干扰脉冲,就会造成输出混乱。由于干扰脉冲的数量和位置是随机的,因此在接收机输出端产生的效果就是“抖舵”。除此之外,因电位器接触不好而造成编码波形的畸变等原因,也会影响接收效果,造成“抖舵”。对于窄小的干扰脉冲,一般的PPM电路可以采用滤波的方式消除;而对于较宽的干扰脉冲,滤波电路就无能为力了。这就是为什么普通的PPM比例遥控设备,在强干扰的环境下或超出控制范围时会产生误动作的原因。尤其是在有同频干扰的情况下,模型往往会完全失控。
3. SBUS(S-BUS/S.BUS)
SBUS:每11个位(bit)表示一个通道数值的协议,串口通信,但是sbus的接收机通常是反向电平,连接到无人机时需要接电平反向器,大部分支持sbus的飞行控制板已经集成了反向器,直接将接收机连接到飞行控制器即可。
SBUS是一个串行通信协议,最早由日本厂商FUTABA(扶他爸~)引入,随后FrSky的很多接收机也开始支持,S.BUS是全数字化接口总线,数字化指的是该协议使用现有数字通信接口作为通信的硬件协议,使用专用的软件协议,这使得该设备非常适合在单片机系统中使用,也就是说适合与飞控连接。这也就是我为什么要将这个协议详细叙述的原因。总线是指他可以连接多个设备,这些设备通过一个Hub与这个总线相连,得到各自的控制信息。
SBUS使用RS232C串口的硬件协议作为自己的硬件运行基础。 使用TTL电平,即3.3V。 使用负逻辑,即低电平为“1”,高电平为“0”。 采用100K的波特率(注意:不兼容波特率115200),8位数据位,两位停止位,偶效验,即8E2的串口通信。
SBUS是一个接收机串行总线的输出,通过这根总线,可以获得遥控器上所有通道的数据。目前很多模型及无人机电子设备都支持SBUS总线的接入。使用SBUS总线获取通道数据,效率高,而且节省硬件资源,只需要一根线即可获取所有通道的数据。
XBUS:常规通信协议,支持18个通道,数据包较大,串口通信有两种模式,可以在遥控器的配置选项中配置。接收机无需做特殊配置。
IBUS:不需要取反,波特率115200;
SBUS一帧数据的长度为25个字节:
字节[0]:SBUS头,0x0F
字节[1-22]:16个伺服通道,每个伺服通道采用11位编码
字节[23]:
位7:数字通道17(0x80)
位6:数字通道18(0x40)
位5:丢帧(0x20)
位4:用来激活故障安全(0x10)
位0-3:n/a
字节[24]:SBUS结束字节,0x00
具体协议的格式如下:
[数据头] [第一个字节] [第二个字节] ......[第二十二的字节] [标志位] [数据尾]
数据头、标志位、数据尾 不携带信息,而且数据头和数据尾是固定的,数据头=0x0f; 数据尾=0x00;
数据头(1字节)+数据(22字节)+标志位(1字节)+数据尾(1字节)
SBUS的每个RC通道值映射为:
-100%= 173(相当于PWM伺服信号中的1000)
0%= 992(相当于PWM伺服信号中的1500)
100%= 1811(相当于PWM伺服信号中的2000)
值得注意的有三点:
(1)SBUS采用负逻辑,所以无论接收还是发送都要进行硬件取反(注意,一定要硬件取反),电路如下:
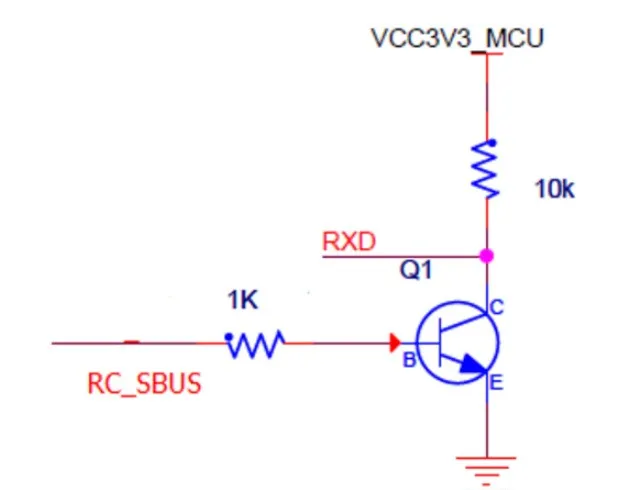
STM32F0芯片内置了反相电路,所以芯片外围不用加。
(2)SBUS有两种模式,
a.高速模式:每4ms发送一次
b.低速模式:每14ms发送一次
就是说每间隔4ms或者14ms这个串口就发送25个字节的数据,这25个字节的数据最多可以包含16个信息。
(3)100K的波特率不是标准波特率,一般串口工具都不能直接读取(所以不要直接用电脑调试,除非你的电脑写好了非标准串口),可以用单片机读取。
编码原理
一个信息是二进制的11bit,比如1111 1111 111就可以表示一个信息,一共16个这样的信息,按照顺序将这16个信息依次排成一串,得到一个176bit(11 *16)的数据,也就是22字节(176 / 8 = 22)的数据,再加上数据头数据尾校验位就组成了一个要通过串口传送的信息。每隔4或者14ms就传送一个这样的信息。
所以这16个信息每一个所能表示的最大值是2^11 = 2048,也就是他的精度。
标志位的高四位有特殊含义,第四位并没有使用,依照我的理解,第七位和第六位表示两个数字通道(通道17和18)信息(就是只有高低电平的通道,一般用来控制通断或者某个电机简单的启动或者停止,比如1表示启动电机0表示停止电机)。第五位表示帧丢失,接收机红色LED亮起,如果这一位为1,表示这一帧信号出问题了,接收机红色LED亮起。第四位表示故障保护激活,意思应该是说如果这一位为1,激活接受方故障保护。
bit7 = ch17 = digital channel (0x80)
bit6 = ch18 = digital channel (0x40)
bit5 = Frame lost, equivalent red LED on receiver (0x20)
bit4 = failsafe activated (0x10)
bit3 = n/a
bit2 = n/a
bit1 = n/a
bit0 = n/a
代码实现可以查看笔者这篇文章:https://www.bilibili.com/read/cv5824207
4. DSM2(DSMX)
5. STM32实现PPM信号输出
纸上得来终觉浅,绝知此事要躬行。
道理讲了这么多,让我们上手实现一下PPM输出,这是我们J20航模遥控器要用到的一个功能模块,迟早要加进去。
tim.c文件
#include "tim.h" #include "main.h" #define PPM_NUM 18 //PPM数组中的个数,这里是8通道1+8*2+1 u16 PPM_Array[PPM_NUM] = {500,1000,500,1000,500,500,500,1000, 500,1000,500,1000,500,1000,500,1000,500,8000}; u16 PPM_Index = 0;//PPM数组索引号 /*TIM3的中断初始化*/ static void NVIC_Configuration(void) { NVIC_InitTypeDef NVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3的中断号 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级0 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //子优先级1 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 } /*PPM引脚初始化*/ static void PPM_GPIO_Configuration(void) { GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE); //使能GPIO外设时钟 //设置PPM引脚为推挽输出功能,输出脉冲波形 GPIO_InitStructure.GPIO_Pin = PPM_Pin; //PPM引脚号 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出 GPIO_Init(PPM_GPIO_Port, &GPIO_InitStructure);//初始化PPM端口 } /*TIM3初始化*/ void PPM_Init(void) { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟 TIM_TimeBaseStructure.TIM_Period = 500; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler = 71; //设置用来作为TIMx时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);//允许 更新 产生中断 PPM_GPIO_Configuration(); //GPIO初始化 NVIC_Configuration(); //中断初始化 TIM_Cmd(TIM3, ENABLE); //使能TIM3 PPM = 0;//前500us输出低电平 } /*TIM3中断服务子程序*/ void TIM3_IRQHandler(void) { if(TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) { TIM_ClearITPendingBit(TIM3, TIM_IT_Update); // 清除标志位 TIM3->ARR = PPM_Array[PPM_Index]-1;//更新TIM3的自动重装载值,减1是给后几行程序留时间 PPM = !PPM;//更改电平 PPM_Index++; if(PPM_Index>=PPM_NUM) { PPM_Index = 0; } } }
tim.h文件
#ifndef __TIM_H #define __TIM_H #include "main.h" void PPM_Init(void); #endif
main.c文件
/*
* 定时器TIM3实现PPM输出
* 具体说明见Doc/ReadMe.txt文档
*/
#include "main.h"
/*变量定义*/
/*程序开始时运行一次的代码*/
void setup(void)
{
delay_init();//初始化延时函数
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2,2位抢占优先级和2位子优先级
usart_init(115200);//初始化串口1(波特率为115200,8个数据位,无校验,1个停止位)
PPM_Init();
}
/*不断循环执行的代码*/
void loop(void)
{
}
int main()
{
setup();
while(1){loop();}
}
main.h文件
#ifndef __MAIN_H #define __MAIN_H #ifdef __cplusplus extern "C" { #endif /*main.h统一定义引脚,便于移植*/ #include "stm32f10x.h" #include "sys.h" #include "delay.h" #include "usart.h" #include "tim.h" /*引脚定义*/ #define PPM_Pin GPIO_Pin_13 #define PPM_GPIO_Port GPIOC #define PPM PCout(13) #ifdef __cplusplus } #endif #endif
工程文件下载:https://files.cnblogs.com/files/cai-zi/PPM.zip
用逻辑分析仪接在PC13,查看波形输出如下,看起来时间还是很准确的。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号