
1.ORB特征
是目前看来非常具有代表性的实时图像特征。[ORB特征:改进的FAST(oriented FAST)关键点+BRIEF描述子]
这个博客讲的很详细可做参考:http://blog.csdn.net/qq_18661939/article/details/52900524
2.汉明距离:
汉明距离是以理查德•卫斯里•汉明的名字命名的。在信息论中,两个等长字符串之间的汉明距离是两个字符串对应位置的不同字符的个数。换句话说,它就是将一个字符串变换成另外一个字符串所需要替换的字符个数。例如:
1011101 与 1001001 之间的汉明距离是 2。
2143896 与 2233796 之间的汉明距离是 3。
"toned" 与 "roses" 之间的汉明距离是 3。
给予两个任何的字码,10001001和10110001,即可决定有多少个相对位是不一样的。在此例中,有三个位不同。要决定有多少个位不同,只需将xor运算加诸于两个字码就可以,并在结果中计算有多个为1的位。例如:
10001001
Xor 10110001
00111000
两个字码中不同位值的数目称为汉明距离(Hamming distance) 。
3.直接法
3.1直接法介绍
直接法是视觉里程计另一主要分支,它与特征点法有很大不同。随着SVO、LSD-SLAM等直接法SLAM方案的流行,直接法本身也得到越来越多的关注。尽管特征点法在视觉里程计中占据主流地位,研究者们认识它至少有以下几个缺点:
- 关键点的提取与描述子的计算非常耗时。实践当中,SIFT目前在CPU上是无法实时计算的,而ORB也需要近20毫秒的计算。如果整个SLAM以30毫秒/帧的速度运行,那么一大半时间都花在计算特征点上。
- 使用特征点时,忽略了除特征点以外的所有信息。一张图像有几十万个像素,而特征点只有几百个。只使用特征点丢弃了大部分可能有用的图像信息。
- 相机有时会运动到特征缺失的地方,往往这些地方都没有什么明显的纹理信息。例如,有时我们会面对一堵白墙,或者一个空荡荡的走廓。这些场景下特征点数量会明显减少,我们可能找不到足够的匹配点来计算相机运动。
我们看到使用特征点确实存在一些问题。针对这些缺点,也存在若干种可行的方法:
- 只计算关键点,不计算描述子。同时,使用光流法(Optical Flow)来跟踪特征点的运动。这样可以回避计算和匹配描述子带来的时间,但光流本身的计算需要一定时间;
- 只计算关键点,不计算描述子。同时,使用直接法来计算特征点在下一时刻图像的位置。这同样可以跳过描述子的计算过程,而且直接法的计算更加简单。
- 既不计算关键点、也不计算描述子——根据像素来直接计算相机运动。
第一种方法仍然使用特征点,只是把匹配描述子替换成了光流跟踪,估计相机运动时仍使用PnP或ICP算法。而在,后两个方法中,我们会根据图像的像素信息来计算相机运动,它们称为直接法。
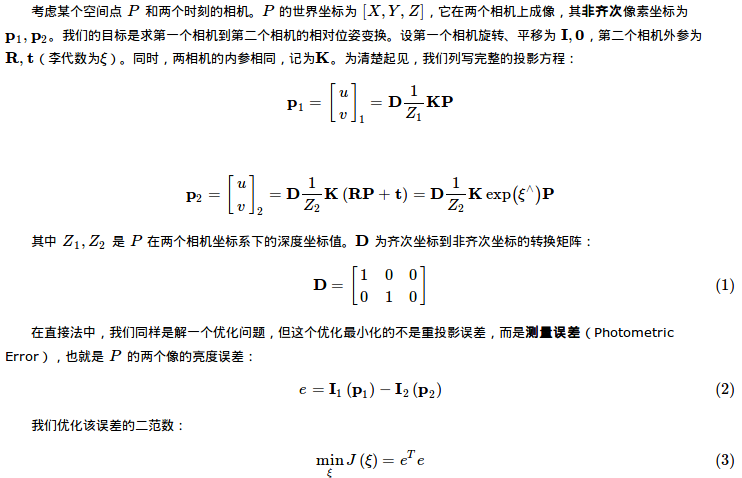
使用特征点法估计相机运动时,我们把特征点看作固定在三维空间的不动点。根据它们在相机中的投影位置,通过最小化重投影误差(Reprojection error)来优化相机运动。在这个过程中,我们需要精确地知道空间点在两个相机中投影后的像素位置——这也就是我们为何要对特征进行匹配或跟踪的理由。//而在直接法中,我们最小化的不再是重投影误差,而是测量误差(Phometric error)。
直接法是本讲介绍的重点。它的存在就是为了克服特征点法的上述缺点(虽然它会引入另一些问题)。直接法直接根据像素亮度信息,估计相机的运动,可以完全不用计算关键点和描述子。于是,直接法既避免了特征的计算时间,也避免了特征缺失的情况。只要场景中存在明暗变化(可以是渐变,不形成局部的图像特征),直接法就能工作。根据使用像素的数量,直接法分为稀疏、稠密和半稠密三种,具有恢复稠密结构的能力。相比于特征点法通常只能重构稀疏特征点,直接法和稠密重建有更紧密的联系。
历史上,虽然早期也有一些对直接法的使用,但直到RGB-D相机出现后,人们才发现直接法对RGB-D相机,进而对单目相机,都是行之有效的方法。随着一些使用直接法的开源项目的出现(如SVO、LSD-SLAM等),它们逐渐地走上主流舞台,成为视觉里程计算法中重要的一部分。
3.2直接法数学推导
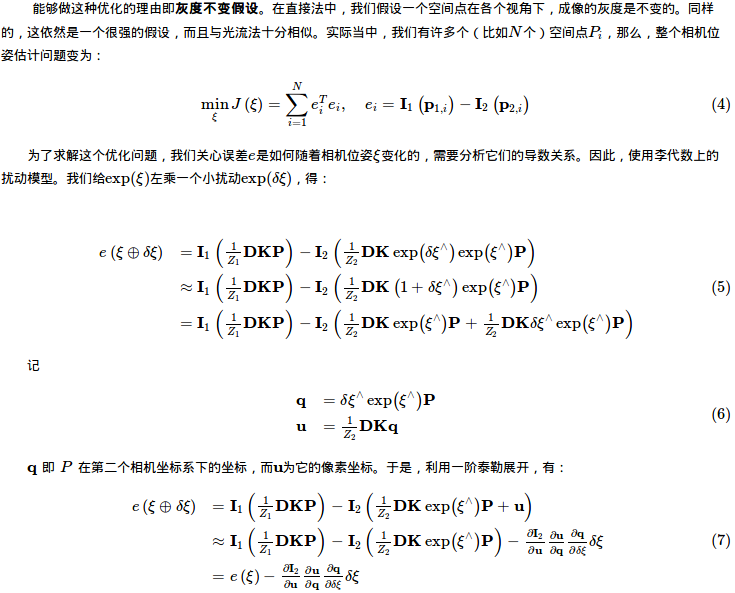
直接法和光流非常相似,它们都是基于灰度不变假设的:
灰度不变假设:同一个空间点的像素灰度,在各个图像中是固定不变的。
灰度不变假设是一个很强的假设,实际当中很可能不成立。事实上,由于物体的材质不同,像素会出现高光和阴影部分;有时,相机会自动调整曝光参数,使得图像整体变亮或变暗。这些时候灰度不变假设都是不成立的,因此直接法/光流的结果也不一定可靠。不过,暂且让我们认为该假设成立,从而看看如何计算相机的运动。


3.2直接法的使用
在我们上面的推导中,P是一个已知位置的空间点,它是怎么来的呢?在RGB-D相机下,我们可以把任意像素反投影到三维空间,然后投影到下一个图像中。如果在单目相机中,我们也可以使用已经估计好位置的特征点(虽然是特征点,但直接法里是可以避免计算描述子的)。根据P的来源,我们可以把直接法进行分类:
- P来自于稀疏特征点,我们称之为稀疏直接法。通常我们使用数百个特征点,并且会像L-K光流那样,假设它周围像素也是不变的。这种稀疏直接法速度不必计算描述子,并且只使用数百个像素,因此速度最快,但只能计算稀疏的重构。
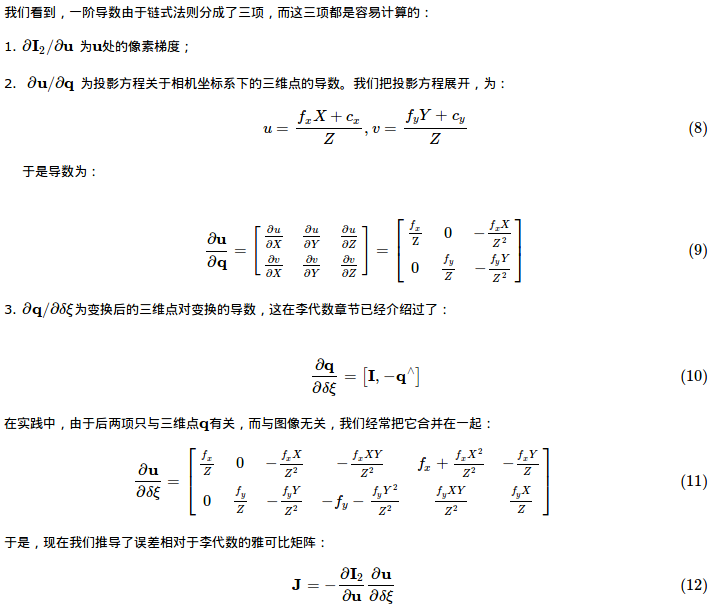
- P来自部分像素。我们看到式(12)中,如果像素梯度为零,整一项雅可比就为零,不会对计算运动增量有任何贡献。因此,可以考虑只使用带有梯度的像素点,舍弃像素梯度不明显的地方。这称之为半稠密(Semi-Dense)的直接法,可以重构一个半稠密结构。
- P为所有像素,称为稠密直接法。稠密重构需要计算所有像素(一般几十万至几百万个),因此多数不能在现有的 CPU上实时计算,需要GPU的加速。可以看到,从稀疏到稠密重构,都可以用直接法来计算。它们的计算量是逐渐增长的。稀疏方法可以快速地求解相机位姿,而稠密方法可以建立完整地图。具体使用哪种方法,需要视机器人的应用环境而定。
3.3直接法的讨论
3.4 直接法的优缺点总结
大体来说,它的优点如下:
- 可以省去计算特征点、描述子的时间。
- 只要求有像素梯度即可,无须特征点。因此,直接法可以在特征缺失的场合下使用。比较极端的例子是只有渐变的一张图像。它可能无法提取角点类特征,但可以用直接法估计它的运动。
- 可以构建半稠密乃至稠密的地图,这是特征点法无法做到的。
另一方面,它的缺点也很明显:
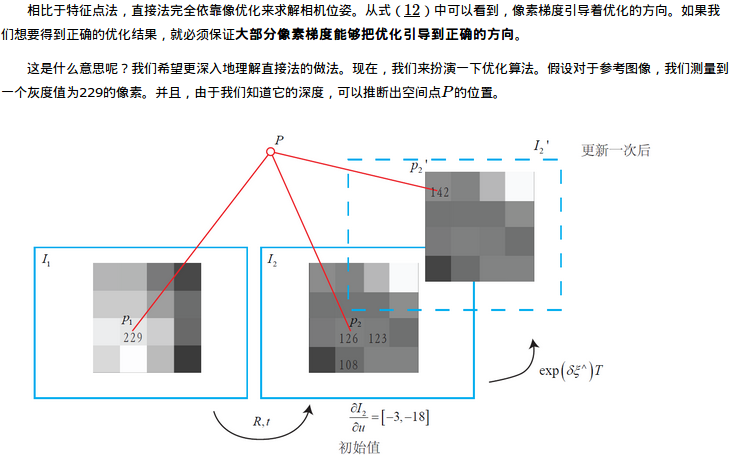
- 非凸性——直接法完全依靠梯度搜索,降低目标函数来计算相机位姿。其目标函数中需要取像素点的灰度值,而图像是强烈非凸的函数。这使得优化算法容易进入极小,只在运动很小时直接法才能成功。
- 单个像素没有区分度。找一个和他像的实在太多了!——于是我们要么计算图像块,要么计算复杂的相关性。由于每个像素对改变相机运动的“意见”不一致。只能少数服从多数,以数量代替质量。
- 灰度值不变是很强的假设。如果相机是自动曝光的,当它调整曝光参数时,会使得图像整体变亮或变暗。光照变化时亦会出现这种情况。特征点法对光照具有一定的容忍性,而直接法由于计算灰度间的差异,整体灰度变化会破坏灰度不变假设,使算法失败。

