PS:转载请标明出处 http://www.cnblogs.com/IClearner/;本文如有错误,欢迎留言更正。
因为学习了其他方面的知识,耽搁了更新。今天我们就聊聊跨时钟域中的数据信号传输的问题。主要内容预览:
·使用握手信号进行跨时钟域的数据传输
·FIFO的介绍
·在进行FIFO的RTL设计前的问题
·FIFO的RTL设计(与仿真测试)
·跨时钟域中的数据信号传输总结
一、使用握手信号进行跨时钟域的数据传输
下面叙述的意义相同:前级时钟=发送时钟; 后级时钟=采样时钟=接收时钟
使用握手信号传输数据不是我们的重点,重点是FIFO的设计。在使用握手信号进行数据传输之前,我们说说为什么双D触发器链不应该用于数据的传输。
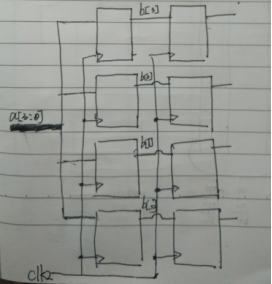
一般情况下,我们要传输的数据都是多位的,也就是以数据总线的形式传播的。如果我们使用简单的多组D触发器链进行同步数据的话,由于每一种D触发器链第一级触发器都有可能出现亚稳态,稳定下来之后的电平可能出错;由于有多组D触发器链,就有可能发送多个电平出错,因而导致数据出错,如下图所示:
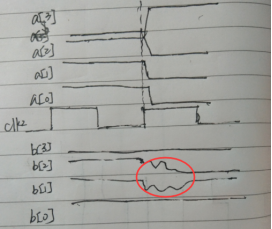
可以看到,原来前面的时钟域发送的0111数据变成1000的时候,捕获时钟的时钟采样本来要才到0111的,由于保持时间不足,导致了b[2]、b[1]出现亚稳态,而且b[2]稳定后的电平是错误的电平,由此就传输了错误的数据。因此直接使用触发器链进行同步数据是不建议的。
于是乎,我们就看看使用握手信号是怎么进行传输数据的。
·数据变化速率比采样时钟域低
当数据的速率比采样时钟域慢时,也就是说,数据速率相对于采样时钟域(接收数据的时钟域)来说是慢时钟,可以使用控制信号进行同步,在采样到慢时钟域的控制信号后,接收采样数据,时序图如下所示:

这里只给出了时序图,电路可以按照时序图进行设计。需要注意的是,这个额外的控制信号(wr_en_s)是由前面的逻辑产生的。这与下面的电路不一样:
在下面的这个电路中,控制信号是由上升沿检测电路产生的,而且是接收时钟驱动的上升沿检测电路(也就是说这个控制信号是由后级的逻辑产生的),电路如下所示:
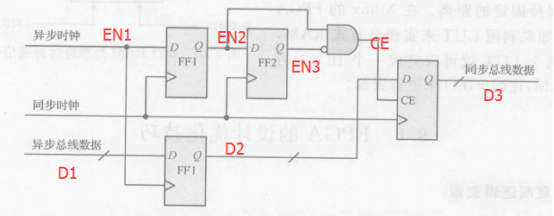
下面我们来分析一下这个电路吧,时序图如下所示:

从时序图中可以看到,可以用上升沿检测电路,检测发送时钟的上升沿,然后这个沿相当于使能信号。上面中,检测到了第二个发送时钟的上升沿,之后就有了使能信号,采样的数据也是第二时钟发送的数据DB,因此对应起来是没有问题。这里由于没有检测到EN1第一个上升沿,所以没有采样到DA也是正常的,这是因为前面的波形没有画出的缘故。
·当数据的速率(或者说发送时钟的频率)略高于接收时钟端
由于发送时钟比接收时钟快,于是对于接收时钟,发送时钟就相当于窄脉冲信号,这样我们就有思路了。我们还是上面一样,采用上升沿检测信号当做使能信号;但是问题来了,发送时钟是快的,可能会错过上升沿。于是乎,我们就把窄脉冲捕获电路和上升沿检测电路结合起来。先是窄脉冲捕捉电路,把时钟的沿捕捉到,然后进行边沿检测,检测得到的结果作为使能信号,电路图如下所示:

具体就不分析了,需要强调的是,这个是发送时钟也不能太快。
·数据变化速率比采样时钟快很多
当数据的速率比采样的时钟的速率快很多时,对应到时钟的关系就是——发送时钟和比接收时钟快很多时,这个时候采样时钟就采样不到数据,或者说会采漏部分数据,因此这时候就不能用握手信号了。也许有人说我可以增加使能信号,把数据拉长啊,等后面的采样时钟采样到使能信号、接收到数据之后,我再改变时钟。这种方法的实质就是硬生生地把数据变化率盖满,也就是把发送时钟域的时钟改慢,跟前面的数据变化速率比采样时钟域低的实质是一样的。因此当数据变化率比采样时钟快很多时,就要采样下面介绍的FIFO了。
二、FIFO的介绍
终于写到FIFO了,FIFO 是first in first out的缩写,也就是“先进先出”;从字面理解,就是说,数据先进来的,就先出去。前面说了当快时钟域传输数据到慢时钟域时,就推荐用FIFO了。FIFO无论是快到慢,还是慢到快,都可以使用它进行数据的缓冲,可谓是“快慢皆宜”啊。
FIFO的工作流程如下:
FIFO在写时钟和状态信号的控制下,根据写使能信号往FIFO里面写数据,当写到一定程度后,FIFO存不下新数据的了(或者要以牺牲丢弃旧数据为贷款),这时候就不能往FIFO里面写数据了;在读时钟和状态信号的控制下,根据读使能信号从FIFO里面读出数据,当读到一定程度后,FIFO里面没有数据了,就不能继续读了,不然就会读出错误的数据。根据读写时钟是否一致(同步),FIFO的种类又可以分成同步FIFO和异步FIFO。FIFO能够读写数据,肯定需要数据的存储单元,这里存储数据的单元往往是双口RAM。
FIFO的写过程:在复位的时候,FIFO(双口RAM)里面的数据被清零(也就是不存在数据)。复位之后,只能进行写操作,因为什么都没有,读数据会读出错误的值。这个时候,当外部给FIFO写使能信号了,在时钟的驱动下,数据就会被写入FIFO里面的RAM存储单元(存储单元的地址由写指针寄存器的内容确定,写指针寄存器中的内容称为写地址,复位的时候为0),写完数据之后(或者在允许写数据之后),这个写指针寄存器就会自动加一,指向下一个存储单元。当写到一定程度的时候(写指针寄存器到达一定的数值),旧数据还没有被读出的时候,再写入新数据就会把旧数据给覆盖,这个时候称为写满,需要产生写满的状态信号(full,简称满)。在写满的时候,需要禁止继续写数据。
FIFO的读过程:在复位的时候,FIFO里面没有数据,因此这个时候是禁止读数据的。当里面有数据之后,外部读信号到来后,在时钟信号到来的时候,FIFO就会根据读地址(由读指针寄存器的内容确定,读指针寄存器里面的内容称为读地址,复位的时候为0)读出相应的数据,读出数据之后(或者说允许RAM读之后),读指针寄存器自动加一。指向下一个存储单元。当读到一定的程度的时候,也就是FIFO里面没有数据了,这个时候称为读空,需要产生读空的状态信号(empty,简称空)。在读空的时候,需要禁止继续读数据。
根据前面的描述,我们就可以知道,在复位的时候,FIFO空有效、满无效,禁止读数据,只能往里面写数据。当把FIFO里面的内容都写满的时候,FIFO满有效,空无效,这时候只能读数据,而不能继续往里面写数据。
三、在进行FIFO的RTL设计前的问题
根据FIFO的介绍内容,我们试着来推导一下FIFO大致由哪些部分构成。
首先,FIFO需要存储数据,因此就需要存储器;由于需要读,也需要写,于是乎就需要一个DPRAM(double port RAM,双端口RAM)。
然后,RAM需要读/写地址,它才知道在哪里读/写数据,因此需要读/写地址产生模块,也就是需要读/写地址寄存器。什么时候进行写,什么时候进行读,因此需要读/写控制逻辑和空满状态的信号产生逻辑。
最后,空满信号的产生需要通过对读地址和写地址的比较,由于读写地址在不同的时钟域,因此需要同步电路进行同步。
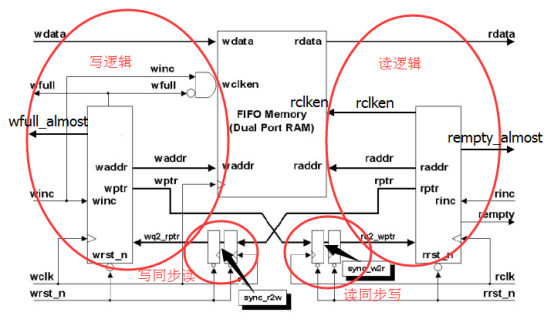
通过上面的简单介绍,我们就得到了FIFO的大致框图如下(主要是告诉大家为什么会有这么一个框图):
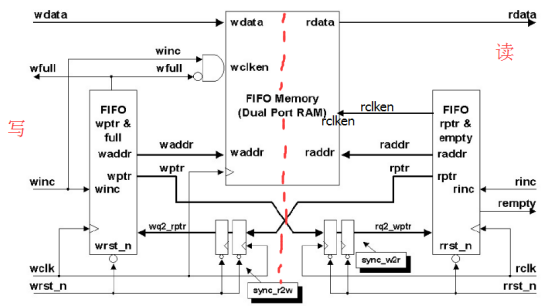
现在来看看这些信号是什么意思吧:
w:写时钟域一方的信号;r:读时钟域一方的信号
wclk:写时钟
wrst_n:写复位,低有效
rclk:读时钟
rrst_n:读复位,低有效
winc:外部输入的写使能信号
rinc:外部输入的读使能信号
wdata :要写进数据,要写进FIFO里面存储的数据。
rdata:读数据,从FIFO里面读取出来的数据。
wdata:要读出的数据,要读出FIFO里面存储的数据
wfull:写满的状态信号
rempty:读空的状态信号
wclken:RAM的允许写信号,在这个信号有效的情况下,RAM才能写得进数据。
rclken:RAM的允许读信号,在这个信号有效的情况下,RAM才能读得出数据。
waddr:RAM的写地址。
raddr:RAM的读地址
wptr:要同步到写时钟域的读指针(读地址)。
rptr:要同步到读时钟域的写指针(写时钟)
wq2_rptr:读地址rptr同步到写时钟域的读地址(格雷码,后面会说为什么用格雷码)
rq2_wptr:写地址rptr同步到读时钟域的读地址(格雷码,后面会说为什么用格雷码)
syn_r2w:读同步到写触发器链中间信号。
syn_w2r:写同步到读触发器链中间信号。
介绍完这些信号之后,我开始聊聊FIFO设计前的一些问题。
·FIFO的空满信号产生
空状态信号:
一开始复位的时候,空信号是有效的,当写了数据之后,空信号就无效了。然后当数据被读取完之后,空信号就有效了。那么什么时候数据被读取完了呢,也就是数据被读取完的时候有什么特征呢?特征就是读地址和写地址相等,如下所示:

由于读地址要追赶写地址,在赶上的时候,地址全等就证明了读空了。
也许有人会问:写地址由于要同步到读时钟域去,会存在同步延时的,比如 说t=0s的时候同步过去,此时写地址为A;在t=2s的时候A同步过来了,但是这个 时候写地址已经变为A+2,而你同步过来的这个写地址为A。如果在t=2s这个时候读地址=A,即读地址=写地址,读赶上了写,按照上面的设计想法就会产生读空信号,但是实际上是不相等的,也就是实际上读并没有赶上写,即没有读空的,这不就是产生错误的读空信号了吗?
首先,是存在这样的情况,但是这种情况不是设计错误。一方面由于我们要产生读空信号,目的是也就是防止继续读从而读出错误的数据;实际上没有读空,即使产生了读空信号,也是没有影响,相当于提前判断产生读空信号而已。另一方面由于是读时钟域采样的读的地址,这个读地址是实时的;写地址是延时的,当这个两者相等时,我们这个实时的地址在比实际的写地址小的时候就产生读空信号,防止了读空。因此即使产生读空信号,也不会因为读空而产生错误的数据。因此是没有设计错误的。
写满状态:
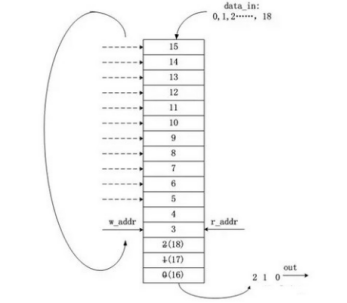
一开始复位之后,进行写数据;由于地址(假设地址是4位,也就是深度是4位)是可以回卷的,也就是说,写指针从3写到15后,继续写又会返回到3那里;假如复位后读操作只读到地址3那里就不读了,那么这个时候就写满了。也就是说,写满的时候,写地址和读地址是相等的,如下所示:
于是乎,我们该怎么区分在读地址和写地址相同的时候是读空还是写满呢?下面来介绍一种常用的方法:
将地址深度拓宽1位当做标志位,回卷一次标志位取反。比如上面的例子中,4bit地址拓宽为5bit,那么读地址就是3(由于读地址没有回卷,所以是(0)0011)那里,当写地址回卷之后与读地址相同(由于写地址回卷了,最高位取反,所以是(1)0011),因此这就是写满了。当读地址回卷之后,变成10011,这个时候,就读空了。也就说,虽然DPRAM的深度还是4bit,但是我们在进行设计地址寄存器的时候,增多一位当做状态。然后读写地址全相等的时候,表示是读空;除了标志位外,剩余的地址为全部相等,那么就表示是写满。
这里还是会产生与前面的空信号一样的问题,也就是同步过来的读信号是延时的值,与前面一样,是不会影响写满信号的,不属于设计错误。
除了上面这种方法之外,在同步FIFO中,还可以使用计数器的方法。设置一个状态计数器,复位的时候为0。写的时候,计数器加1;读的时候,计数器减1。那么很容易得出,计数器为0的时候,就是读空就有效了;当计数器等于FIFO的深度(2^n - 1)时,就说明写满了。这种方法如果FIFO深度很大的话,就需要很大的计数器了,所以有局限性。
从上面的分析中,由此也可以知道,空信号的产生需要把写地址同步到读时钟域,然后进行比较(比较之后产生);满的信号需要把读地址同步到写时钟域,然后进行比较(比较之后产生)。
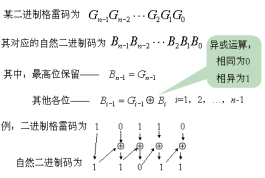
·为什么要选择格雷码作为同步地址的编码
首先,我们知道,读地址需要跟写地址比较来产生空和满信号,然后对于异步FIFO,读写为不同时钟,如果直接采样,就会有:类似前面数据产生多位亚稳态的问题,(时序图就不画了)比如写地址从00111改变从01000的时候,读时钟恰好采样,那么除了最高位外,其它的4位都有可能产生亚稳态,有可能同步得错误的地址。这是引入格雷码的一个原因。另外一个原因就是:无论是读地址还是写地址,在(允许)进行读和写之后,地址都是加1,而不是加2或者加3等其他的值。为什么会这样呢?我们来看看格雷码的编码:

从上图中我们可以知道,从地址0变成地址1,格雷码和二进制码都是0000变成0001;地址从1变成地址2,格雷码是0001变成0011,而二进制是0010......我们很容易得到,在相邻地址变化中,格雷码只有一位发生变化,如地址从7变为8时,格雷码是0100变成1100,也就是只有最高位发送变化;我们再来看看二进制编码,二进制编码则有可能全部都改变,地址从7变为8时,二进制码是0111变成1000,4位都发生了变化。假如采样的时候地址恰好从7变为8时,那么二进制编码就有多位发生亚稳态,稳定后的值什么都有可能;而格雷码由于只有最高位跳变,第三位由于没有跳变,不会产生亚稳态可以稳定正确采样,稳定后的值只有0100和1100,地址只差数值1,是不会影响判断的结果的(因为是同步过来的,是个延时的值,不打紧)。
知道了格雷码的优点之后,我们就要使用各格雷码了。由于RAM的读写地址都是(传统)二进制编码,这里使用格雷码有两种使用方法,第一种使用方式是,将二进制编码转换成格雷码,然后把格雷码同步过去,再把同步过来的格雷码反转换成二进制码,进行二进制地址和二进制地址的比较;另外一种使用方式是,将二进制编码转换成格雷码,然后把格雷码同步过去,然后使用格雷码进行比较。这里使用第一种方式,虽然这种方式比较需要多两块格雷码转二进制的电路,但是我们可以实时比较,能将寻址的二进制马上与同步过来的“延时”二进制进行比较;使用格雷码比较的话,实际值会慢一拍(因为实时方的格雷码需要寄存输出,会慢一拍,如果不寄存输出,就有可能产生毛刺)。
然后格雷码的与二进制的互相转换如上图,下面是转换讲解(左边为格雷转二进制,右边为二进制转格雷):
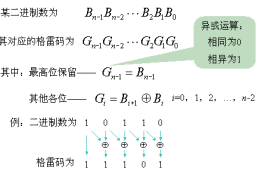
在布尔代数里面有A^B=C →A=B^C
·FIFO的深度选择
首先,FIFO是有宽度和深度的。FIFO的宽度就是RAM的位宽,也是要存入/取出数据的位宽;然后深度就RAM的地址深度,也就是最多可以存多少个数据。例如FIFO的宽度是8bit,那么FIFO每个时钟存入的数据的宽度也是8bit;FIFO的深度是10bit,那么FIFO就最多可以存2^10=1024个8bit的数据。
我们要存储数据,FIFO的深度选小了,在写的时候就很有可能写溢出;深度选大了,就会浪费存储面积。选择一个合适的深度,最主要的就是防止写溢出;由于FIFO要读也要写,那么FIFO的(地址)深度该选多少合适呢?
这就和你的读写速度有关了,根据读写速度来选择FIFO深度,此外需要注意的是,在使用FIFO的时候,写的平均吞吐量要和读的平均吞吐量相等。
现在举例来说明:设你的写时钟频率为100M,读时钟为200M;写速度为:100个时钟写如60个数据,读速度为:100个时钟读出30个数据 。
①首先验证你的数据吞吐量是否相等:
写的平均吞吐量=100M*60/100=60M个数据/S
读的平均吞吐量=200M*30/100=60M个数据/S
因此这两个是相等的,不会发生写溢出;如果写大于读,那么FIFO早晚会很快写满溢出;如果读大于写,那么FIFO迟早会读空。因此需要读写吞吐量相同。
②求最低深度
我们知道读写速度之后,就可以判断FIFO要多少深度才合适了,由于FIFO的深度考虑是出于我们要防止写溢出(写满),因此我们考虑写的情况:
写的时候是100个时钟写60个数据,我们不知道它是怎么样子写的,我们从悲观的角度出发,也就是从写得最密集的角度出发:前100个写时钟的最后60个时钟写60个数据,然后后100个写时钟的最前60个时钟写入60个数据,也就是在120个写时钟内写入了120数据。
这120个写时钟的时间是:

在这段时间内,根据读写的速率要求,肯定是要读数据的,读出的数据为:
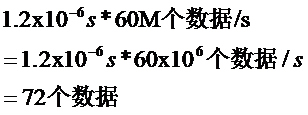
因此我们FIFO需要的深读就等于没有读出的数据的个数就是:
120-72 =48
然而由于上面读的方式是一个平均的方式,此外FIFO的深度一般是2的整数次幂,要符合格雷码的编码转换规则,因此我们深度一般不选择48,而是选择比它大的2的整数次幂的数,比如64或者128。FIFO深度的选择过程就如上面所述,(这里参考《FPGA深度解析》)。
四、FIFO的设计(与仿真测试)
接下来我们就要设计一个异步FIFO了,这里我们设计的FIFO跟上面的有点不同,整体结构如下所示:
这里主要是多出了两个状态信号:
wfull_almost:将满信号。为了预防万一,FIFO要满的时候,使这个信号有效,当面的模块时钟(前级电路)检测到这个信号有效后,就把winc变为无效,用来提供给前面电路的指示信号。这个信号要比full信号提前,因为考虑到在判断出满之后,还需要一些动作(延时),才能不写;于是乎我们就用将满信号来补充这些延时,而不是等到满信号才做出反应。
rempty_almost:将空信号。这个也是为了考虑在空信号判断出来之后,到禁止继续读可能有延时,从而设立这个标识,在将空的时候就禁止继续读数据。
将满信号和将空信号的关键因素就是读写地址之间的举例(间隔),那我们来看看写和读的间隔怎么产生:
对于写时钟域,我们是要产生几乎满信号,这对应的间隔就是看看写地址还有多少就赶上了读地址,求出这两个地址之间的间隔,然后再与预设的间距比较,如果这个间隔小于预设的间距,那么就产生几乎满的信号。那么我们这个间隔怎么求:
·当读写状态位相同的时候,如下图所示:

由于最高位相同,所以写需要回卷才能最上读,那么间隔也就是A+B;假设FIFO的深度是D,写地址为waddr,读地址为raddr,那么间隔就是D-C=D-(waddr-raddr)=D+raddr-waddr.(注意,这里的读/写地址不包括状态位)
·当读写状态不同位时,如下图所示:
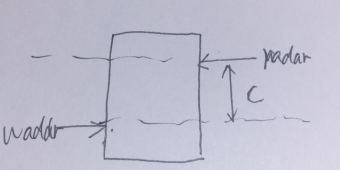
这时候waddr再有C就追上raddr了,因此间隔就是raddr-waddr。
上面是对于写区域间隔的生成,下面就来说说读区域的间隔怎么产生吧:
·状态位一样的时候,也就是没有回卷的时候,如下图所示:

很显然,无论是加不加状态位,都是间隔都是waddr-raddr,也就是说,还有waddr-raddr的举例,raddr就追上了waddr。
·当状态位不一样时:

需要回卷才能追上写,因此间隔就是:
FIFO的深度-(raddr-waddr)=FIFO+waddr-raddr(这里的读写地址不包括状态位)。
当加上状态位之后,我们发现,间隔是可以用raddr-waddr来表示的,比如raddr=1011,waddr是0011,间隔是8;加上状态位后,Raddr=01011,Waddr=10011,间隔也可以表示为01011-10011=01000=8(借位是会被省略掉的),因此用加上状态位后,间隔可以表示为waddr-raddr。
因此在读时钟域,间隔的表示就是带状态位的waddr-raddr。
说完了几乎满和几乎空信号,我们再聊聊上面的框图,整个FIFO可以分成写逻辑模块、读逻辑模块、写/读同步读/写模块。其中
·写逻辑的模块的功能是:根据状态信号和外部的写信号产生对RAM的写控制信号、产生RAM的地址信号、产生空和将空的状态的状态信号。因此写逻辑模块可以分成3个部分:①(RAM)写控制逻辑部分;②RAM写地址产生部分;③状态产生部分。
①RAM写控制逻辑部分的功能就是,产生RAM的写使能信号:wclken有效的条件是:外部信号写使能信号winc来了,而且此时满信号没有效,这个时候就允许往RAM里面写数据了。
②RAM写地址产生部分的功能就是产生RAM的地址和产生格雷码地址(产生的格雷码地址传输给同步模块):复位的时候,RAM的地址waddr为0;此后,在写时钟上升沿检测到RAM的写使能wclken有效之后,waddr自动加一,指向下一个单元,wclken无效waddr则不变。我们使用比RAM地址宽1位的地址寄存器进行递增,地址寄存器的最高位充当空满信号时候的状态比较位。
③状态产生部分的功能就是:将同步模块过来的格雷码转换成二进制,然后跟RAM写地址产生部分传来的地址进行比较,产生将满信号和满信号。(将满信号的产生就是两个地址小于某个间隔时有效,满信号产生则是间隔等于0或者:间隔只有一个地址只差,但是这个时候RAM的写信号还有效)。
·读逻辑也是一样,这里不再详述,具体细节我们在代码后面进行讨论。
·写/读同步读/写模块其实就是双D触发器(链)。
代码如下所示:


1 //Async_FIFO ,4bit字宽,4bit深度
2 module Async_FIFO #(
3 parameter DATA_WIDTH = 4 ,
4 parameter DEEP_WIDTH = 4
5 )(
6 //写时钟域信号
7 output wfull ,
8 output wfull_almost ,
9 input [DATA_WIDTH-1:0] wdata ,
10 input winc ,
11 input wclk ,
12 input wrst_n ,
13 //读时钟域信号
14 output rempty ,
15 output rempty_almost ,
16 output [DATA_WIDTH-1:0] rdata ,
17 input rinc ,
18 input rclk ,
19 input rrst_n
20 );
21 //中间的连线信号
22 wire [DEEP_WIDTH-1:0] raddr ;
23 wire [DEEP_WIDTH:0] rptr ;
24 wire rclken ;
25 wire [DEEP_WIDTH:0] rq2_wptr;
26
27 wire [DEEP_WIDTH-1:0] waddr ;
28 wire [DEEP_WIDTH:0] wptr ;
29 wire wclken ;
30 wire [DEEP_WIDTH:0] wq2_rptr;
31
32 Read_Data inst_Read_Data(
33 .rempty ( rempty ),
34 .rempty_almost ( rempty_almost ),
35 .raddr ( raddr ),
36 .rptr ( rptr ),
37 .rclken ( rclken ),
38 .rinc ( rinc ),
39 .rq2_wptr ( rq2_wptr ), //input,同步过来写格雷码指针
40 .rclk ( rclk ),
41 .rrst_n ( rrst_n )
42 );
43
44 DFF_Sync inst_r2w(
45 .dff_out ( wq2_rptr ),
46 .dff_in ( rptr ),
47 .dff_clk ( wclk ),
48 .dff_rst_n ( wrst_n )
49 );
50
51
52 Write_Data inst_Write_Data(
53 .wfull ( wfull ), //几乎满信号
54 .wfull_almost ( wfull_almost ), //几乎空信号
55 .waddr ( waddr ), //输出给RAM的地址
56 .wptr ( wptr ), //格雷码地址指针
57 .wclken ( wclken ), //写RAM信号
58 .wq2_rptr ( wq2_rptr ), //同步过来的读格雷码指针
59 .winc ( winc ), //外部输入的使能信号
60 .wclk ( wclk ), //写时钟
61 .wrst_n ( wrst_n ) //写复位
62
63 );
64
65 DFF_Sync inst_w2r(
66 .dff_out ( rq2_wptr ),
67 .dff_in ( wptr ),
68 .dff_clk ( rclk ),
69 .dff_rst_n ( rrst_n )
70 );
71
72 ram_16x16 ram_16x16_inst (
73 .data ( wdata ),
74 .rdaddress ( raddr ),
75 .rdclock ( rclk ),
76 .rden ( rclken ),
77 .wraddress ( waddr ),
78 .wrclock ( wclk ),
79 .wren ( wclken ),
80 .q ( rdata )
81 );
82
83
84 endmodule
1 module Write_Data #(
2 parameter DEEP_WIDTH = 4 ,
3 parameter FIFO_DEEP = 5'd16 ,
4 parameter GAP_WIDTH = 3
5 )(
6 output wfull , //几乎满信号
7 output reg wfull_almost , //几乎空信号
8 output [ DEEP_WIDTH-1:0] waddr , //输出给RAM的地址
9 output reg [ DEEP_WIDTH:0] wptr , //格雷码地址指针
10 output wclken , //写RAM信号
11 input [ DEEP_WIDTH:0] wq2_rptr , //同步过来的读格雷码指针
12 input winc , //外部输入的使能信号
13 input wclk , //写时钟
14 input wrst_n //写复位
15
16 );
17 reg [ DEEP_WIDTH:0] waddr_reg ;//地址寄存器,5位
18 reg [ DEEP_WIDTH:0] wq2_rptr_bin ;//读指针同步到写时钟域后,从格雷码转换成二进制
19 reg [ DEEP_WIDTH:0] wgap_reg ;//寄存间隔的距离
20
21 //第一部分,写RAM使能信号的生成
22 assign wclken = winc &&(~ wfull );
23
24 //--------------------------------------//
25
26 //第二部分,产生RAM的地址和格雷码
27 always @(posedge wclk or negedge wrst_n)
28 if(wrst_n == 1'b0) begin
29 waddr_reg <= 5'd0;
30 end
31 else if( wclken )begin //地址自增一
32 waddr_reg <= waddr_reg + 5'd1 ;
33 end
34
35 //生成RAM地址
36 assign waddr = waddr_reg[ DEEP_WIDTH-1:0];
37
38 //生成格雷码
39 always @(posedge wclk or negedge wrst_n)
40 if(wrst_n == 1'b0) begin
41 wptr <= 5'd0;
42 end
43 else begin
44 wptr <= waddr_reg ^( waddr_reg >> 1'b1); //其实也就是位错之后的异或
45 //移位操作不代表移位寄存器
46 end
47
48 //-----------------------------------//
49
50 //第三部分
51
52 //将格雷码转换成二进制编码
53 always @( * )begin
54 wq2_rptr_bin[4] = wq2_rptr[4] ;
55 wq2_rptr_bin[3] = wq2_rptr[4] ^ wq2_rptr[3] ;
56 wq2_rptr_bin[2] = wq2_rptr[4] ^ wq2_rptr[3] ^ wq2_rptr[2] ;
57 wq2_rptr_bin[1] = wq2_rptr[4] ^ wq2_rptr[3] ^ wq2_rptr[2] ^ wq2_rptr[1] ;
58 wq2_rptr_bin[0] = wq2_rptr[4] ^ wq2_rptr[3] ^ wq2_rptr[2] ^ wq2_rptr[1] ^ wq2_rptr[0] ;
59 end
60
61 //产生满的间隔
62 always @(*)begin
63 if( waddr_reg[4] ^ wq2_rptr_bin[4] ) //最高位不相等的时候,也就是有一个是回卷了
64 wgap_reg = wq2_rptr_bin[3:0] - waddr_reg[3:0] ;
65 else //最高位相等的时候,也就是没有回卷,那么间隔就是FIFO_DEEP-( waddr_reg - wq2_rptr_bin)
66 wgap_reg = FIFO_DEEP + wq2_rptr_bin - waddr_reg ;
67 end
68
69 //根据间隔产生几乎满信号
70 always @(posedge wclk or negedge wrst_n)
71 if(wrst_n == 1'b0) begin
72 wfull_almost <= 1'b0 ;
73 end
74 else if( wgap_reg < GAP_WIDTH)begin
75 wfull_almost <= 1'b1 ;
76 end
77 else
78 wfull_almost <= 1'b0 ;
79
80 //产生满信号
81 assign wfull = (~(|wgap_reg ))||(( wgap_reg == 1)&&( winc ));//间隔为0的时候为满,间隔是1的时候还要写,也为满
82
83 endmodule
1 module Read_Data #( parameter DATA_WIDTH = 4 ,
2 parameter DEEP_WIDTH = 4 ,
3 parameter GAP_WIDTH = 3
4 )(
5 output rempty ,
6 output reg rempty_almost ,
7 output [DEEP_WIDTH-1:0] raddr , //给 DPRAM的地址
8 output reg [DATA_WIDTH:0] rptr , //给写时钟域的读格雷码
9 output rclken , //DPRAM的读使能信号
10 input rinc , //外部输入的读使能信号
11 input [DEEP_WIDTH:0] rq2_wptr ,
12 input rclk ,
13 input rrst_n
14 );
15
16 reg [ DEEP_WIDTH:0] raddr_reg ;//地址寄存器,5位
17 reg [ DEEP_WIDTH:0] rq2_wptr_bin ;//写指针同步到读时钟域后,从格雷码转换成二进制
18 reg [ DEEP_WIDTH:0] rgap_reg ;//寄存间隔的距离
19
20 //第一部分,读RAM使能信号的生成
21 assign rclken = rinc &&(~ rempty );
22
23 //--------------------------------------//
24
25 //第二部分,产生RAM的地址和格雷码
26 always @(posedge rclk or negedge rrst_n)
27 if(rrst_n == 1'b0) begin
28 raddr_reg <= 5'd0;
29 end
30 else if( rclken )begin //地址自增一
31 raddr_reg <= raddr_reg + 5'd1 ;
32 end
33
34 //生成RAM地址
35 assign raddr = raddr_reg[ DEEP_WIDTH-1:0];
36
37 //生成格雷码
38 always @(posedge rclk or negedge rrst_n)
39 if(rrst_n == 1'b0) begin
40 rptr <= 5'd0;
41 end
42 else begin
43 rptr <= raddr_reg ^( raddr_reg >> 1'b1); //其实也就是位错之后的异或,移位操作不代表移位寄存器
44 end
45
46 //-----------------------------------//
47
48 //第三部分
49
50 //将格雷码转换成二进制编码
51 always @( * )begin
52 rq2_wptr_bin[4] = rq2_wptr[4] ;
53 rq2_wptr_bin[3] = rq2_wptr[4] ^ rq2_wptr[3] ;
54 rq2_wptr_bin[2] = rq2_wptr[4] ^ rq2_wptr[3] ^ rq2_wptr[2] ;
55 rq2_wptr_bin[1] = rq2_wptr[4] ^ rq2_wptr[3] ^ rq2_wptr[2] ^ rq2_wptr[1] ;
56 rq2_wptr_bin[0] = rq2_wptr[4] ^ rq2_wptr[3] ^ rq2_wptr[2] ^ rq2_wptr[1] ^ rq2_wptr[0] ;
57 end
58
59 //产生读空的间隔
60 always @(*)begin
61 //无论状态位是否相同,都可以用带状态位的写地址减读地址
62 rgap_reg = rq2_wptr_bin - raddr_reg ;
63 end
64
65 //根据间隔产生几乎满信号
66 always @(posedge rclk or negedge rrst_n)
67 if(rrst_n == 1'b0) begin
68 rempty_almost <= 1'b0 ;
69 end
70 else if( rgap_reg < GAP_WIDTH)begin
71 rempty_almost <= 1'b1 ;
72 end
73 else
74 rempty_almost <= 1'b0 ;
75
76 //产生满信号
77 assign rempty = (~(|rgap_reg ))||(( rgap_reg == 1)&&( rinc ));//间隔为0的时候为空,间隔是1的时候还要读,也为空
78
79
80
81 endmodule
1 module DFF_Sync #(parameter DEEP_WIDTH = 4
2 )(
3 output reg [DEEP_WIDTH:0] dff_out ,
4 input [DEEP_WIDTH:0] dff_in ,
5 input dff_clk ,
6 input dff_rst_n
7 );
8
9 reg [DEEP_WIDTH:0] sync_reg ; //两级同步D触发器
10 always @(posedge dff_clk or negedge dff_rst_n)begin
11 if( dff_rst_n == 1'b0)begin
12 sync_reg <= 5'd0 ;
13 dff_out <= 5'd0 ;
14 end
15 else begin
16 sync_reg <= dff_in ;
17 dff_out <= sync_reg ;
18 end
19 end
20
21 endmodule
1 //timescale
2 `timescale 1ns/1ns
3 module tb_module #(
4 parameter DATA_WIDTH = 4 )();
5 //the Internal motivation variable(register) and output wire
6 wire wfull ;
7 wire wfull_almost ;
8 reg [DATA_WIDTH-1:0] wdata ;
9 reg winc ;
10 reg wclk ;
11 reg wrst_n ;
12 //读时钟域信号
13 wire rempty ;
14 wire rempty_almost ;
15 wire [DATA_WIDTH-1:0] rdata ;
16 reg rinc ;
17 reg rclk ;
18 reg rrst_n ;
19
20
21 //the External motivation storage variable
22
23
24 //Sub module signal,example: wire [1:0] xxx == xxx_inst.xxx_inst.xxx;
25
26 // Global variable initialization ,such as 'clk'、'rst_n'
27 initial begin
28 #0 rrst_n = 0;
29 wrst_n = 0 ;
30 wclk = 0;
31 rclk = 0;
32 // rinc = 0 ;
33 // winc = 0 ;
34 //wdata = 0 ;
35 #20 rrst_n = 1 ;
36 #25 wrst_n = 1 ;
37 end
38
39 //Internal motivation variable initialization
40 //initial begin
41 //end
42 // winc generate
43 always @(posedge wclk or wrst_n)begin
44 if( wrst_n == 1'b0 )begin
45 winc = 1'b0;
46 end
47 else if( wfull_almost )
48 winc = 1'b0;
49 else
50 winc = 1'b1 ;
51 end
52
53 // rinc generate
54 always @(posedge rclk or rrst_n)begin
55 if( rrst_n == 1'b0 )begin
56 rinc = 1'b0 ;
57 end
58 else if( rempty )
59 rinc = 1'b0;
60 else
61 rinc = 1'b1 ;
62 end
63
64 // wdata
65 always @(posedge wclk or negedge wrst_n)begin
66 if( wrst_n == 1'b0 )begin
67 wdata = 4'd0 ;
68 end
69 else if( winc )begin
70 wdata = wdata + 1'b1;
71 end
72 end
73
74 //cloclk signal generation
75 always #15 rclk = ~rclk ;
76 always #10 wclk = ~wclk ;
77
78 //Cases of sub module xxxx xxxx_inst(.(),.(), ... ,.());
79 Async_FIFO Async_FIFO_inst(
80 //写时钟域信号
81 .wfull ( wfull ),
82 .wfull_almost ( wfull_almost ),
83 .wdata ( wdata ),
84 .winc ( winc ),
85 .wclk ( wclk ),
86 .wrst_n ( wrst_n ),
87 //读时钟域信号
88 .rempty ( rempty ),
89 .rempty_almost ( rempty_almost ),
90 .rdata ( rdata ),
91 .rinc ( rinc ),
92 .rclk ( rclk ),
93 .rrst_n ( rrst_n)
94 );
95
96 // Internal motivation variable assignment using task or random
97 /* example
98 task data_assign(xx); | task rand_bit();
99 integer xx,xx,...; | integer i;
100 begin | begin
101 for( ; ; )begin | for(i=0; i<255; i=i+1)begin
102 @(posedge clock) | @(posedge sclk);
103 Internal motivation variable <= xxxxx; | Internal motivation variable <={$random} %2;
104 end | end
105 end | end
106 endtask | endtask
107 */
108
109
110 endmodule
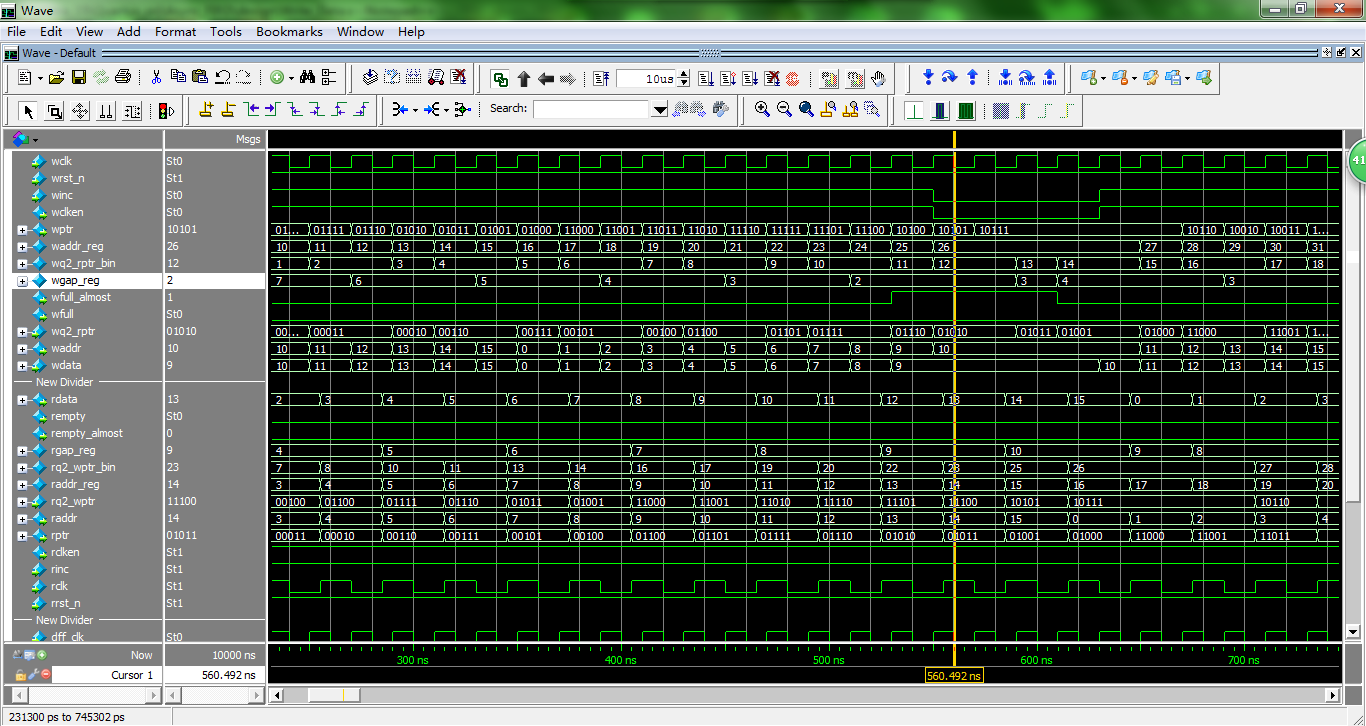
这里的简单仿真代码仿真了写时钟间隔写,读时钟一直读的情况,使用modelsim的仿真波形如下所示:
最后我们来小节一下:
异步FIFO,主要用于跨时钟域的数据信号传输,它的基本架构如下所示(纯手工画):
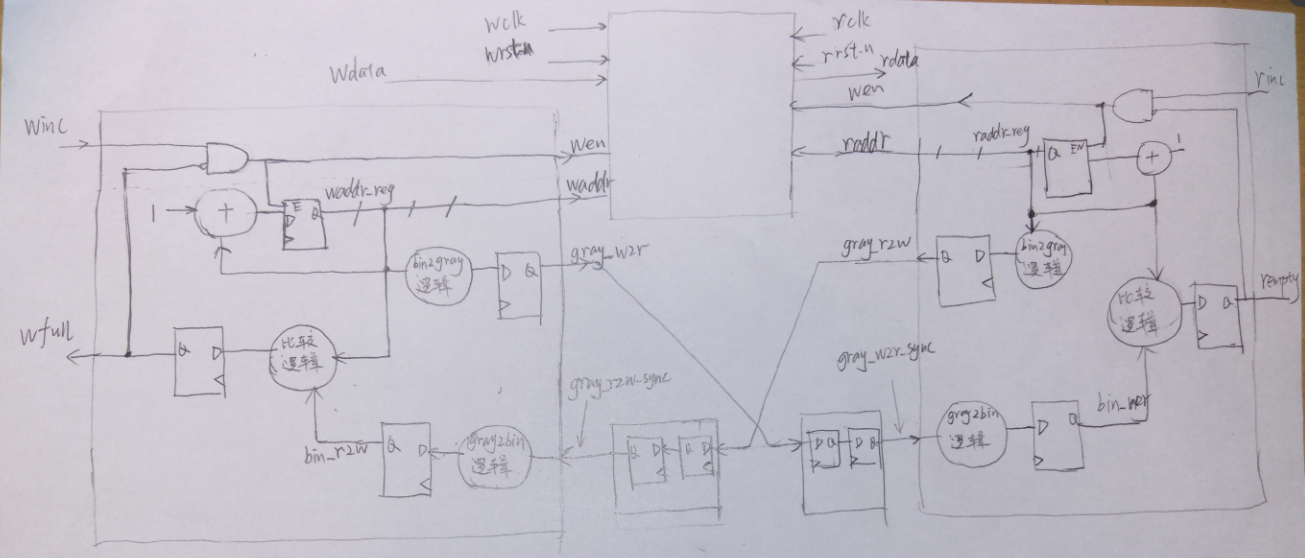
根据从上面电路架构图,就可以写代码实现。
需要注意的是问题有:一个就是地址同步的问题,另外一个是空满信号产生的问题。(深度选择问题这里就不说了)
地址同步主要是用格雷码同步实现;空满信号则通过拓宽地址寄存器来实现。
格雷码与二进制的转换关系上面说了。格雷码的优点就是相邻之间只有一位信号变化,因此常常用来异步设计的编码;缺点就是需要增加相应的组合逻辑。
五、跨时钟域中的数据信号传输总结
跨时钟域的数据信号传输到这里就结束了,在这里进行总结一下:
·数据变化速率比采样速率低、或者比采样速率略快时,可以使用握手信号进行。
·无论是快到慢,还是慢到快,FIFO通吃。
·FIFO的设计需要注意FIFO空满信号产生问题、格雷码的应用问题、深度选择问题等。
·说到格雷码的应用问题,也许会想到能不能先把数据变成格雷码,然后再通过双D触发器同步过去呢?这明显是不能的啊,你的数据不像FIFO的地址产生那样,是具有相邻性的,也就是只差一个1;因此不能把数据变成格雷码,再传输。
PS:本文部分图片来自网络

 浙公网安备 33010602011771号
浙公网安备 33010602011771号