
Radar Installation(贪心)
Time Limit: 1000ms
Problem Description:
Assume the coasting is an infinite straight line. Land is in one side of coasting, sea in the other. Each small island is a point locating in the sea side. And any radar installation, locating on the coasting, can only cover d distance, so an island in the sea can be covered by a radius installation, if the distance between them is at most d. We use Cartesian coordinate system, defining the coasting is the x-axis. The sea side is above x-axis, and the land side below. Given the position of each island in the sea, and given the distance of the coverage of the radar installation, your task is to write a program to find the minimal number of radar installations to cover all the islands. Note that the position of an island is represented by its x-y coordinates.
Input:
The input consists of several test cases. The first line of each case contains two integers n (1<=n<=1000) and d, where n is the number of islands in the sea and d is the distance of coverage of the radar installation. This is followed by n lines each containing two integers representing the coordinate of the position of each island. Then a blank line follows to separate the cases. The input is terminated by a line containing pair of zeros.
Output:
For each test case output one line consisting of the test case number followed by the minimal number of radar installations needed. "-1" installation means no solution for that case.
Sample Input:
3 2 1 2 -3 1 2 1 1 2 0 2 0 0
Sample Output:
Case 1: 2 Case 2: 1
Source:
Beijing 2002
题意:
有一个坐标轴,在x轴的上方时海,下方是陆地,x轴为海岸线,海上有n个小岛,因为种种原因要在海岸线上装雷达,每个雷达的覆盖范围是以d为半径的圆,请用最少的雷达数覆盖所有的小岛,当无法完全覆盖时输出-1;
网上有两种方法:
方法一:将每个区间按照右端点排序,每次在最右段设置雷达,下一个小岛左端点在此雷达左边的点都可以被覆盖,若不满足则设置下一个雷达,向后遍历;
http://blog.csdn.NET/petercsj/article/details/4602946
方法二:按左端点排序,在右端点处设置雷达,若下个点的左端点在此雷达点的右侧,设置新的雷达,向下遍历;若下个点的左端点和右端点均在此雷达点的左边,则不能覆盖,将雷达点位置改变为该点右端点处,此时能够同时覆盖两个点,向下遍历;
http://www.cnblogs.com/zjerly/archive/2011/10/31/2229871.html
思路:我用方法二,
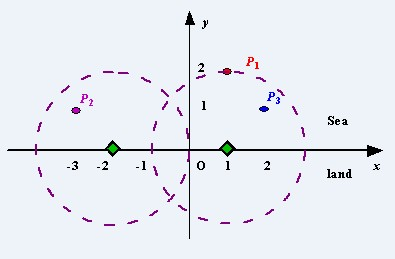
以小岛为圆心以d为半径做圆,计算出圆与x轴的左交点和右交点。左交点为x-sqrt(r*r-y*y),右交点为x+sqrt(r*r+y*y);然后对左交点从小到大排序,令初始雷达为左交点最小岛屿的右交点,如果i点的左交点在雷达的右面,则需要重新装一个雷达,然后令当前点为新雷达的右交点,否则如果i点的右交点在当前雷达的左边,则把当前雷达的位置更新为该点的右交点。
 如图所示
如图所示
AC代码:
1 #include <stdio.h> 2 #include <math.h> 3 #include <string.h> 4 #include <stdlib.h> 5 #include <algorithm> 6 using namespace std; 7 8 struct Radar 9 { 10 double left; 11 double right; 12 }point[1010]; 13 inline bool cmp(Radar a,Radar b) 14 { 15 return a.left<b.left; 16 } 17 int main() 18 { 19 int n,r; 20 double x,y; 21 int count=1; 22 while(~scanf("%d%d",&n,&r)) 23 { 24 if(n==0&&r==0) 25 break; 26 int ans=1;//雷达的个数 27 for(int i=0;i<n;i++) 28 { 29 scanf("%lf%lf",&x,&y); 30 point[i].left=x-sqrt(r*r-y*y);//当前点与x轴的左交点 31 point[i].right=x+sqrt(r*r-y*y);//当前点与x轴的右交点 32 if(y>r||y<0||r<=0)//列举出三种无法覆盖的情况 33 ans=-1; 34 } 35 sort(point,point+n,cmp);//左交点排序 36 if(ans!=-1){ 37 int j=0; 38 for(int i=1;i<n;i++) 39 { 40 if(point[i].left>point[j].right)//point[j]为左交点最小岛屿的右交点 41 { 42 ans++; 43 j=i; 44 } 45 if(point[i].right<point[j].right) 46 { 47 j=i; 48 } 49 } 50 printf("Case %d: %d\n",count++,ans); 51 } 52 else 53 printf("Case %d: -1\n",count++); 54 } 55 return 0; 56 }

