

Vital Sign Detection and Radar Self-Motion Cancellation Through Clutter Identification
这篇论文主要介绍了一种去除雷达自己的移动(radar self-motion effects, RSMs)造成的影响。
方法的步骤:
- 从range信息中选取所有可能的目标
- 从杂波中区别出人体
- 移除解调出杂波的相位,得到关于有效信息的相位
一些笔记:
自相关(autocorrelation) : 自己跟自己比
互相关(cross correlation) : 两个不同信号比
自相关是指一个信号与其自身在不同时间点的互相关,可以反映信号的周期性或稳定性。
互相关是指两个不同信号在不同时间点的取值之间的相关性,可以反映信号的相位差或延迟。
displacement : 位移
首先雷达检测物体时,检测人的位移包括雷达的抖动 and 人体的抖动(心脏跳动之类),但静态物体的抖动只包括雷达的抖动。
所以提取出人和静态物体的相位,是不同的。
从图5和图7就可以分辨出人和物体,两张图的雷达移动速度都为2.2mm/s,很慢
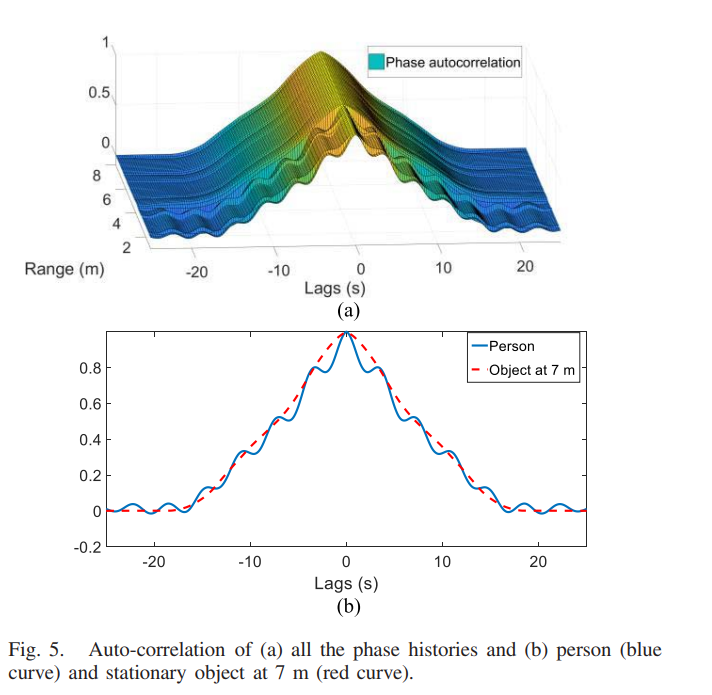
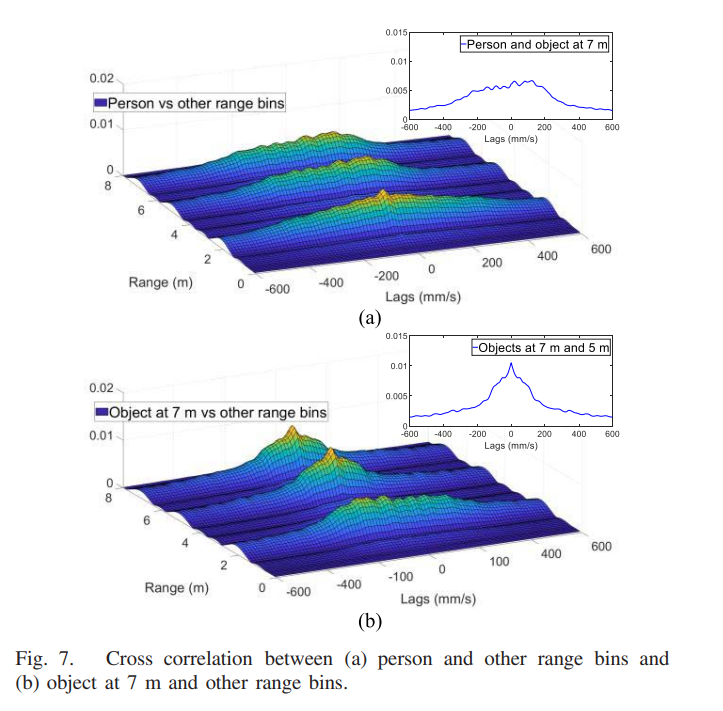
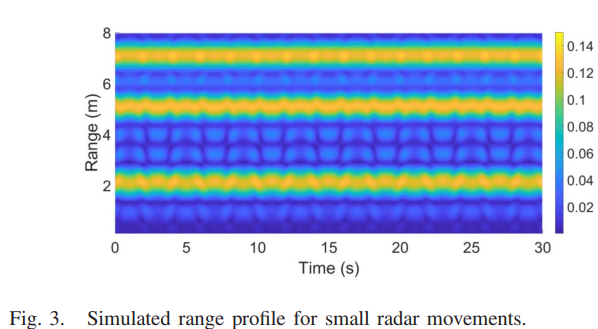
由图5和图7就可以推断出图3中,最下面的那条线是人,上面两条是杂物(clutter)
目前还不清楚怎么把杂波的相位去除?
- 测试了雷达抖不抖动,人走不走动,排列组合4种情况 (测试数据200帧,40ms一帧,所以一共测了8秒,其他都是默认)
这周准备复现一下论文里的环境,测一下静态物体和人,然后画一下自相关和互相关函数图。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号