
大叔学ML第四:线性回归正则化
正则:正则是一个汉语词汇,拼音为zhèng zé,基本意思是正其礼仪法则;正规;常规;正宗等。出自《楚辞·离骚》、《插图本中国文学史》、《东京赋》等文献。 —— 百度百科
基本形式
线性回归模型常常会出现过拟合的情况,由于训练集噪音的干扰,训练出来的模型抖动很大,不够平滑,导致泛化能力差,如下所示:
import numpy as np
import matplotlib.pyplot as plt
from sklearn.preprocessing import PolynomialFeatures
def poly4(X, *theta):
return theta[0] + theta[1] * X + theta[2] * X**2 + theta[3] * X**3 + theta[4] * X**4
''' 创建样本数据 '''
X = np.arange(0, 9, 1)
Y = [-10, 1, 10, 19, 10, 10, 46, 49, 50]
''' 用4次多项式拟合 '''
pf = PolynomialFeatures(degree=4)
featrues_matrix = pf.fit_transform(X.reshape(9, 1))
theta = tuple(np.dot(np.dot(np.linalg.pinv(np.dot(featrues_matrix.T, featrues_matrix)), featrues_matrix.T), np.array(Y).T))
Ycalculated = poly4(X, *theta)
plt.scatter(X, Y, marker='x', color='k')
plt.plot(X, Ycalculated, color='r')
plt.show()
运行结果:
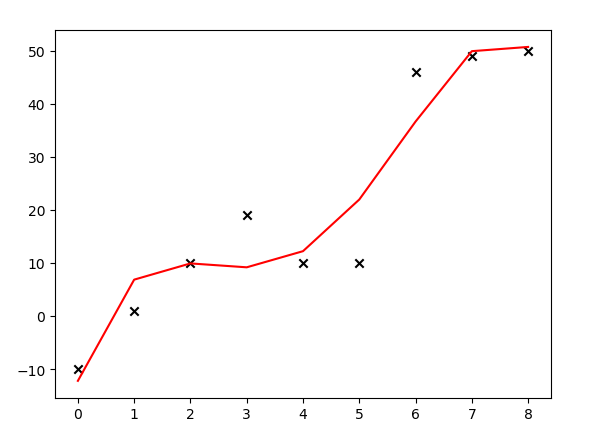
上面的代码中,大叔试图用多项式\(\theta_0 + \theta_1x + \theta_2x^2 + \theta_3x^3 + \theta_4x^4\)拟合给出的9个样本(如对以上代码有疑问,可参见大叔学ML第三:多项式回归),用正规方程计算出\(\vec\theta\),并绘图发现:模型产生了过拟合的情况。解决线性回归过拟合的一个方案是给代价函数添加正则化项。代价函数(参见大叔学ML第二:线性回归)形如:
添加正则化后的代价函数形如:
观察(2)式,添加了正则化项的向量表示形式如下:
变形:
对\(\vec\theta\)求导:
令其等于0,得:$$\vec\theta=(X^TX + \lambda I){-1}XT\vec{y}\tag{5}$$
小试牛刀
对本文开头所给出的代码进行修改,加入正则化项看看效果:
import numpy as np
import matplotlib.pyplot as plt
from sklearn.preprocessing import PolynomialFeatures
def poly4(X, *theta):
return theta[0] + theta[1] * X + theta[2] * X**2 + theta[3] * X**3 + theta[4] * X**4
''' 创建样本数据 '''
X = np.arange(0, 9, 1)
Y = [-10, 1, 10, 19, 10, 10, 46, 49, 50]
''' 用4次多项式拟合 '''
pf = PolynomialFeatures(degree=4)
featrues_matrix = pf.fit_transform(X.reshape(9, 1))
ReM = np.eye(5) #正则化矩阵
ReM[0, 0] = 0
theta1 = tuple(np.dot(np.dot(np.linalg.pinv(np.dot(featrues_matrix.T, featrues_matrix) + 0 * ReM), featrues_matrix.T), np.array(Y).T))
Y1 = poly4(X, *theta1)
theta2 = tuple(np.dot(np.dot(np.linalg.pinv(np.dot(featrues_matrix.T, featrues_matrix) + 1 * ReM), featrues_matrix.T), np.array(Y).T))
Y2 = poly4(X, *theta2)
theta3 = tuple(np.dot(np.dot(np.linalg.pinv(np.dot(featrues_matrix.T, featrues_matrix) + 10000 * ReM), featrues_matrix.T), np.array(Y).T))
Y3 = poly4(X, *theta3)
plt.scatter(X, Y, marker='x', color='k')
plt.plot(X, Y1, color='r')
plt.plot(X, Y2, color='y')
plt.plot(X, Y3, color='b')
plt.show()
运行结果:
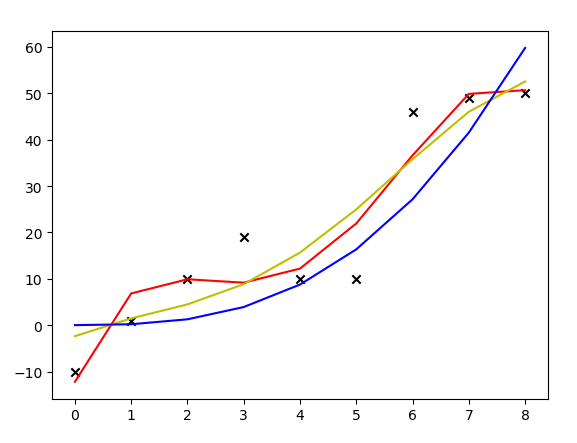
上图中,红线是没有加正则化项拟合出来的多项式曲线,黄线是加了\(\lambda\)取1的正则化项后拟合出来的曲线,蓝线是加了\(\lambda\)取10000的正则化项拟合出来的曲线。可见,加了正则化项后,模型的抖动变小了,曲线变得更加平滑。
调用类库
sklean中已经为我们写好了加正则化项的线性回归方法,修改上面的代码:
import numpy as np
import matplotlib.pyplot as plt
from sklearn.linear_model import Ridge
from sklearn.preprocessing import PolynomialFeatures
def poly4(X, *theta):
return theta[0] + theta[1] * X + theta[2] * X**2 + theta[3] * X**3 + theta[4] * X**4
''' 创建样本数据 '''
X = np.arange(0, 9, 1)
Y = [-10, 1, 10, 19, 10, 10, 46, 49, 50]
''' 用4次多项式拟合 '''
pf = PolynomialFeatures(degree=4)
featrues_matrix = pf.fit_transform(X.reshape(9, 1))
ridge_reg = Ridge(alpha=100)
ridge_reg.fit(featrues_matrix, np.array(Y).reshape((9, 1)))
theta = tuple(ridge_reg.intercept_.tolist() + ridge_reg.coef_[0].tolist())
Y1 = poly4(X, *theta)
plt.scatter(X, Y, marker='x', color='k')
plt.plot(X, Y1, color='r')
plt.show()
运行结果:
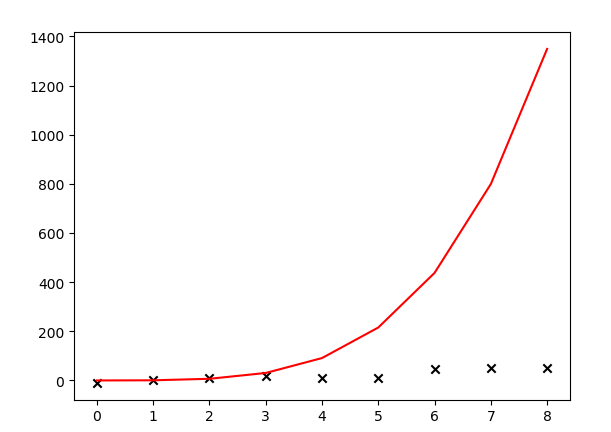
哇,调库和自己写代码搞出的模型差距居然这么大。看来水很深啊,大叔低估了ML的难度,路漫漫其修远兮......将来如果有机会需要阅读一下这些库的源码。大叔猜测是和样本数量可能有关系,大叔的样本太少,自己瞎上的。园子里高人敬请在评论区指教哦。
扩展
正则化项不仅如本文一种添加方式,本文所用的加\(\lambda||\vec\theta||^2\)的方式被称为“岭回归”,据说是因为给矩阵\(X^TX\)加了一个对角矩阵,此对角矩阵的主元看起来就像一道分水岭,所以叫“岭回归”。代码中用的sklean中的模块名字就是Ridge,也是分水岭的意思。
除了岭回归,还有“Lasso回归”,这个回归算法所用的正则化项是\(\lambda||\vec\theta||\),岭回归的特点是缩小样本属性对应的各项\(\theta\),而Lasso回归的特点是使某些不打紧的属性对应的\(\theta\)为0,即:忽略掉了某些属性。还有一种回归方式叫做“弹性网络”,是一种对岭回归和Lasso回归的综合应用。大叔在以后的日子研究好了还会专门再写一篇博文记录。
通过这几天的研究,大叔发现其实ML中最重要的部分就是线性回归,连高大上的深度学习也是对线性回归的扩展,如果对线性回归有了透彻的了解,定能在ML的路上事半功倍,一往无前。祝大家圣诞快乐!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号