
大叔学ML第五:逻辑回归
[TOC]
基本形式
逻辑回归是最常用的分类模型,在线性回归基础之上扩展而来,是一种广义线性回归。下面举例说明什么是逻辑回归:假设我们有样本如下(是我编程生成的数据):
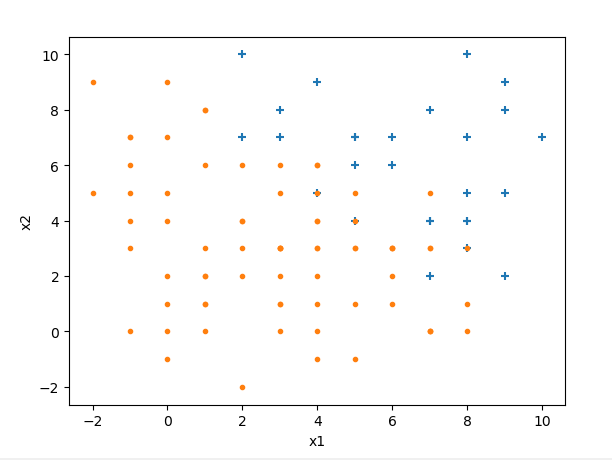
我们要做的是找到一个决策边界,把两类样本给分开,当有新数据进来时,就判断它在决策边界的哪一边。设边界线为线性函数
$$h_\theta(\vec x) = \theta_0 + \theta_1x_1 + \theta_2x_2 \tag {1}$$取0时的直线,如下图:
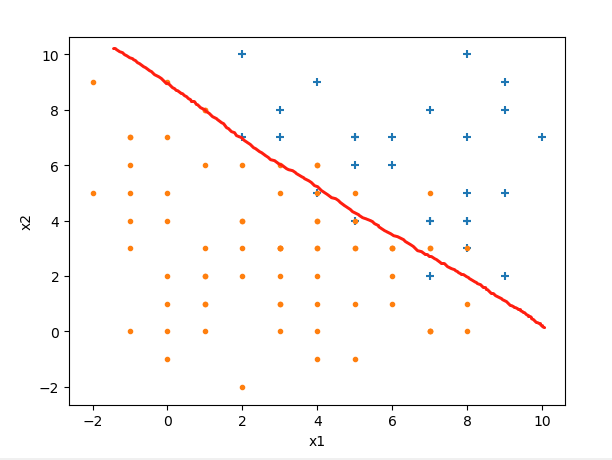
我们的目标就是根据已知的样本来确定$\vec\theta$取值。
上图中,处在边界线左边的为负例(带入(1)式结果小于0),边界线右边的为正例(带入(1)式结果大于0)。从概率的角度考虑:把一个点代入(1)式,如果为正,且越大越离边界线远,它是正例的概率就越大,直到接近1;相反,把一个点代入(1)式,如果为负,且越小离边界线越远,它是正例的概率就越小,直到接近0;此外,把一个点代入(1)式,如果结果正好等于0,那么它在边界线上,为正例和为负例的概率都是0.5。
为了用数学的方式精确表达上面的概率论述,前人找到一个好用的函数:
\(s(z) = \frac{1}{1+e^{-z}} \tag{2}\)
这个函数叫做sigmoid(sigmoid:S形状的)函数(下文用S(z)或s(z)表示sigmoid函数),样子如下:
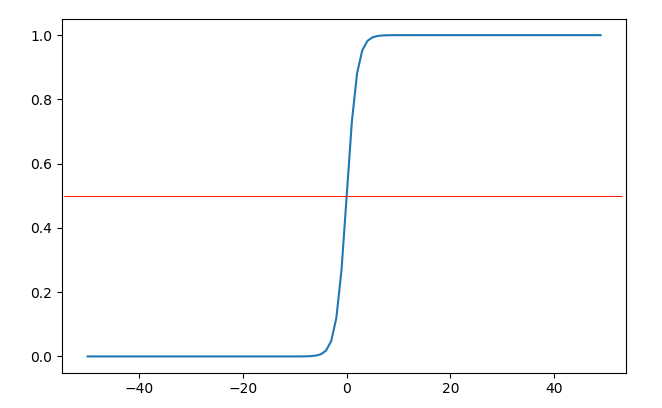
当$z=0$时,函数值为0.5,当$z > 0$时,函数取值$(0.5, 1)$;当$z < 0$时,函数取值$(0, 0.5)$,如果我们把欲判断点代入决策边界(1)式后得到的结果作为sigmoid函数的输入,那么输出就可以表示该点是正例的概率,简直完美。其实S型的函数应该还有别的,为什么前人独爱这个呢?那是因为,这个函求导比较简单,用链式法则可以非常容易算出其导数式为:
\(\frac{d}{z}s(z)=s(z)(1 - s(z)) \tag{3}\)
simgiod函数求导过程:
$$\begin\fracs(z)&=-\frac{1}{(1+e^{-z})2}\cdot e{-z} \cdot -1 \
&=\frac{e^{-z}}{(1+e^{-z})2}\
&=\frac{1+e{-z}-1}{(1+e^{-z})2}\
&=\frac{1+e{-z}}{(1+e^{-z})2} - \frac{1}{(1+e{-z})^2}\
&=s(z) - s(z)^2\
&=s(z)(1-s(z))
\end$$
第一步用了链式法则。
代价函数
逻辑回归的代价函数可由极大似然估计法得出。我们暂且不管极大似然估计法的证明,直观地理解非常容易:如果你是一个班级的新老师,发现有个孩子考了95.5分,你肯定会认为这个孩子很可能是学霸,虽然学霸有时也会考低分,学渣有时也考高分,但是发生概率很小。更一般的叙述是:有若干事件A、B和C,已知其发生概率为分别为$P(A|\theta)$、$P(B|\theta)$和$P(C|\theta)$,如果我们观察到A、B和C已经发生了,那么我们就认为$P(ABC|\theta)\(是个尽可能大的值,如果我们要求\)\theta$,那么$\theta$应该是使得$P(ABC|\theta)$最大的那个值。如果A、B和C互相独立,我们所求的就是使得$P(A|\theta)P(B|\theta)P(C|\theta)\(最大化的\)\theta$。
设$t_\theta(\vec x)=s(h_\theta(\vec x))$已知:$$P(Y=y) = \begin
t_\theta(\vec x), &\text{如果 y = 1} \
1 - t_\theta(\vec x), &\text{如果 y = 0}
\end$$,写到一起:
\(P(Y=y)=t_\theta(\vec x)^y(1-t_\theta(\vec x))^{1-y} \tag{4}\),根据(4)式写出极大似然函数:
$$l(\vec\theta)=\prod_mt_\theta(\vec x{(i)}){y{(i)}}(1-t_\theta(\vec x^{(i)})){1-y{(i)}} $$,设代价函数$$j(\vec\theta)=-\frac{1}\ln l(\vec\theta)$$ ,最大化$l(\vec\theta)$即最小化$j(\vec\theta)$。求对数是为了方便计算,把乘法转换为加法,把幂运算转换为乘法,单调性不变;前面的负号是为了把求最大值问题转换为求最小值问题,习惯上,应用梯度下降法时都是求最小值,不然叫“梯度上升了法”了,手动滑稽。当然,使用梯度下降法的前提条件是函数是凸的,大叔懒得证明了,这个函数就是个凸函数,不管你们信不信,我反正是信了。进一步对上式化解得:
\(j(\vec\theta)=-\frac{1}{m}\sum_{i=1}^m\left[y^{(i)}\ln t_\theta(\vec x^{(i)}) + (1-y^{(i)})\ln(1-t_\theta(\vec x^{(i)}))\right] \tag{5}\)
用梯度下降法求$\vec\theta$
将(5)式对$\vec\theta$求偏导:
- \(\frac{\partial}{\partial\theta_0}j(\vec\theta)=\frac{1}{m}\sum_{i=1}^m(t_\theta(\vec x^{(i)})-y^{(i)})x_0^{(i)}\)
- \(\frac{\partial}{\partial\theta_1}j(\vec\theta)=\frac{1}{m}\sum_{i=1}^m(t_\theta(\vec x^{(i)})-y^{(i)})x_1^{(i)}\)
- \(\cdots\)
- \(\frac{\partial}{\partial\theta_n}j(\vec\theta)=\frac{1}{m}\sum_{i=1}^m(t_\theta(\vec x^{(i)})-y^{(i)})x_n^{(i)}\)
如果读者对矩阵计算非常熟悉的话,应该可以看出,上式可以写成矩阵形式,这样计算更方便:
$$\frac{d\vec\theta}=\frac{1}XT(T-Y),其中,T=\begint_\theta(\vec x{(1)})\
t_\theta(\vec x^{(2)})\
\vdots \
t_\theta(\vec x^{(m)})
\end$$
对$j(\vec\theta)$求导的过程如下,多次应用链式法则即可:
$$\begin
\frac{\partial}{\partial\theta_n}j(\vec\theta)&=-\frac{1}\sum_m\left[y{(i)}\frac{1}{t_\theta(\vec x^{(i)})}t_\theta(\vec x)\prime+(1-y{(i)})\frac{1}{1-t_\theta(\vec x^{(i)})}t_\theta(\vec x)\prime\right]\
&=-\frac{1}\sum_m\left[y{(i)}\frac{1}{t_\theta(\vec x{(i)})}t_\theta(\vec x^{(i)})(1-t_\theta(\vec x^{(i)}))h_\theta(\vec x)\prime+(1-y{(i)})\frac{1}{1-t_\theta(\vec x^{(i)})}t_\theta(\vec x^{(i)})(t_\theta(\vec x^{(i)}) - 1)h_\theta(\vec x)\prime\right]\
&=-\frac{1}\sum_m\left[y{(i)}(1-t_\theta(\vec x{(i)}))h_\theta(\vec x)\prime + (y{(i)})t_\theta(\vec x^{(i)} - 1)h_\theta(\vec x)\prime\right]\
&=-\frac{1}\sum_m\left[y{(i)}(1-t_\theta(\vec x{(i)}))x_n^{(i)} + (y^{(i)})t_\theta(\vec x^{(i)} - 1)x_n^{(i)}\right]\
&=-\frac{1}\sum_m(y{(i)} - t_\theta(\vec x^{(i)}))x_n^{(i)}\
&=\frac{1}\sum_m(t_\theta(\vec x{(i)}) - y^{(i)})x_n^{(i)}
\end$$
- 步骤1用到到了公式:\(\ln x^\prime = \frac{1}{x}\)
- 步骤2用到式(3)
有了偏导式后就可以编程了:
import matplotlib.pyplot as plt
import numpy as np
def sigmoid(z):
return 1 / (1 + np.e**(-z))
def draw_samples(X, Y, sample_count):
''' 绘制正负例. '''
positiveX1 = []
positiveX2 = []
negativeX1 = []
negativeX2 = []
for i in range(sample_count):
if Y[i, 0] == 1:
positiveX1.append(X[i, 0])
positiveX2.append(X[i, 1])
else:
negativeX1.append(X[i, 0])
negativeX2.append(X[i, 1])
plt.scatter(positiveX1, positiveX2, marker='+')
plt.scatter(negativeX1, negativeX2, marker='.')
def draw_border(theta):
'''绘制边界线'''
X = []
Y = []
for x in range(-2, 12):
X.append(x)
Y.append(-theta[0] / theta[2] - theta[1] / theta[2] * x )
plt.plot(X, Y)
def create_samples(samples_count):
''' 生成样本数据'''
X = np.empty((samples_count, 2))
Y = np.empty((samples_count, 1))
for i in range(samples_count):
x1 = np.random.randint(0, 10)
x2 = np.random.randint(0, 10)
y = 0
if x1 + x2 - 10 > 0:
y =1
X[i, 0] = x1
X[i, 1] = x2
Y[i, 0] = y
noise = np.random.normal(0, 0.1, (samples_count, 2))
X += noise
return X, Y
def grad(X, Y, samples_count, theta):
''' 求代价函数在theta处的梯度. '''
T = sigmoid(np.dot(X, theta))
g = np.dot(X.T, (T - Y)) / samples_count
return g
def descend(X, Y, samples_count, theta = np.array([[1],[1],[1]]), step = 0.01, threshold = 0.05):
''' 梯度下降.
Args:
X: 样本
Y:样本标记
theta:初始值
step:步长
threshold:阈值
Returns:
theta:求出来的最优theta
'''
g = grad(X, Y, samples_count, theta)
norm = np.linalg.norm(g)
while norm > threshold:
g = grad(X, Y, samples_count, theta)
norm = np.linalg.norm(g)
theta = theta - g * step
print(norm)
return theta
samples_count = 100
X, Y = create_samples(samples_count)
MatrixOnes = np.ones((100, 1))
X_with_noes = np.hstack((MatrixOnes, X)) # 添加等于1的x0
theta = descend(X_with_noes, Y, samples_count)
plt.xlabel('$x_1$')
plt.ylabel('$x_2$')
draw_samples(X, Y, samples_count)
draw_border(theta.flatten())
plt.show()
运行结果:
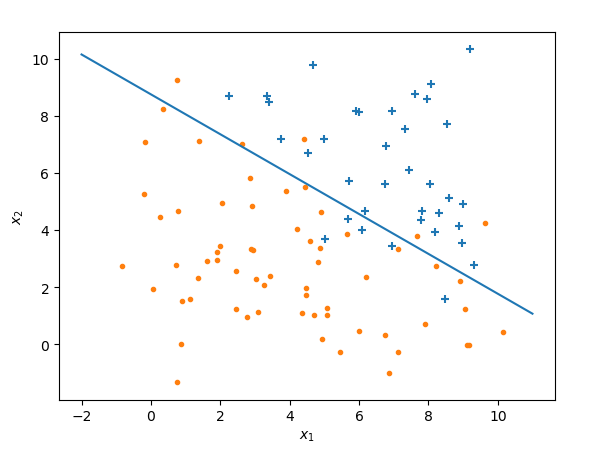
上面的代码中,我在样本矩阵中增加了一列为1的元素,这样做是为了计算方便,使得样本矩阵的列数等于欲求$\vec\theta$的行数,满足矩阵乘法的要求,加上这一列对结果没有影响,请参考大叔学ML第二:线性回归
扩展
- 和线性回归一样,逻辑回归也存在过拟合的情况,可以通过添加一范数、二范数正则化来解决
- 和线性回归一样,逻辑回归的决策边界可以是曲折的多项式,可参考大叔学ML第三:多项式回归,依葫芦画瓢来搞定决曲折的决策边界
- 和线性回归一样,逻辑回归也可以扩展到多余3维的情况,只是不可以做可视化了,代数原理是一致的
- 和线性回归不一样,逻辑回归应该没有“正规方程”,大叔昨天按照线性回归的正规方程的推导思路推导并未得出结果,查资料也未果
- 除了梯度下降法,牛顿法和拟牛顿法也是迭代下降算法,而且下降效率更好,大叔稍后将会写一篇博文介绍之
- 多分类,多分类非常简单,假如样本数据共有3类,记作A、B和C,先把A分为正例,B和C分为负例,会得到一条决策边界,然后再把B分为正例,C分为正例做同样的操作,最后得到3条决策边界,也就是得到3个不同的概率计算函数,如果有新数据进来,分别带入这三个函数,取概率值最大的那个函数所代表的分类即可。
祝元旦快乐!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号