
机器人与SMART组件的配置
---恢复内容开始---
机器人与SMART组件的配置
打开RobotStudior软件,创建一个新工作站
打开相应的机器人系统并且导入做好的SMART组件
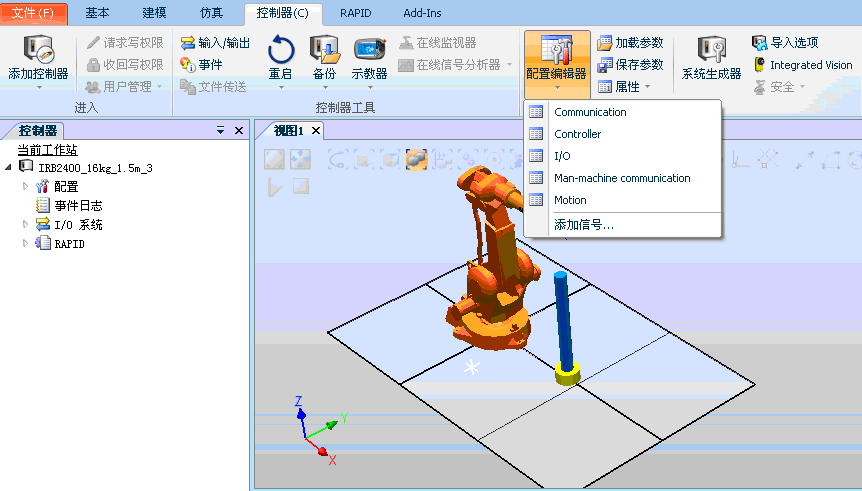
配置机器人的I/O信号
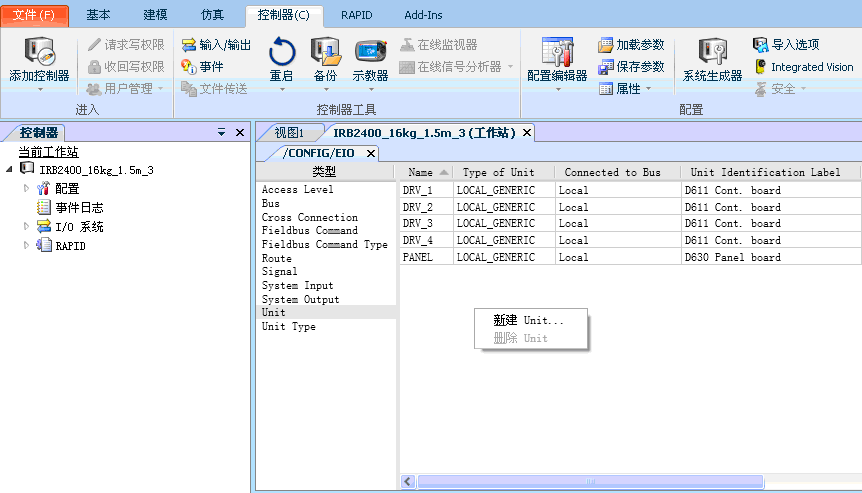
注:导入的SMART组件中有几个DI信号就新建几个DO信号,创建完成之后重启控制器。
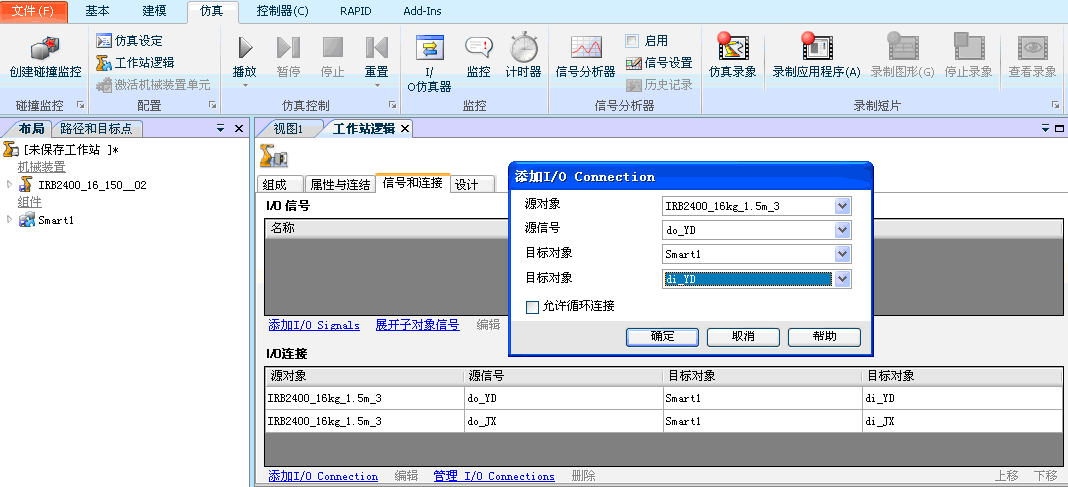
机器人信号与SMART组件信号间的关联
创建机器人路径及程序
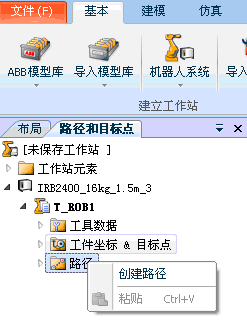
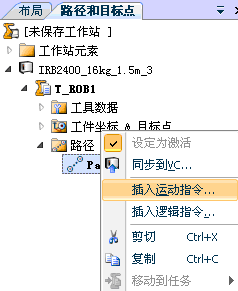
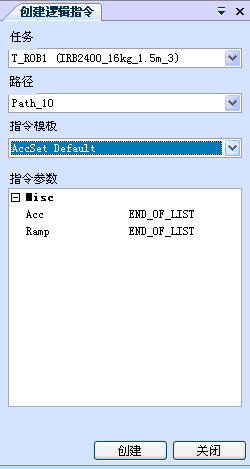
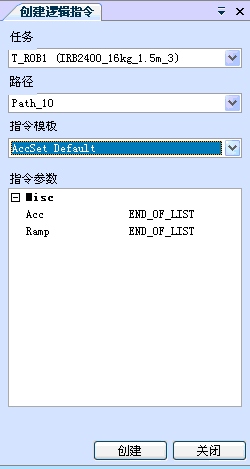
⑴.创建运动指令界面及逻辑指令界面
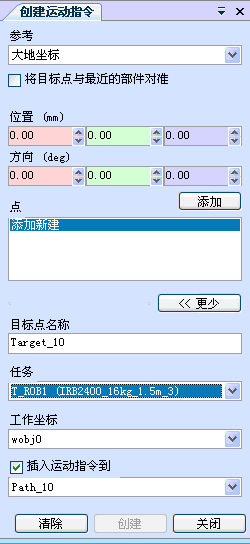
⑵.调整轨迹点上工具的姿态
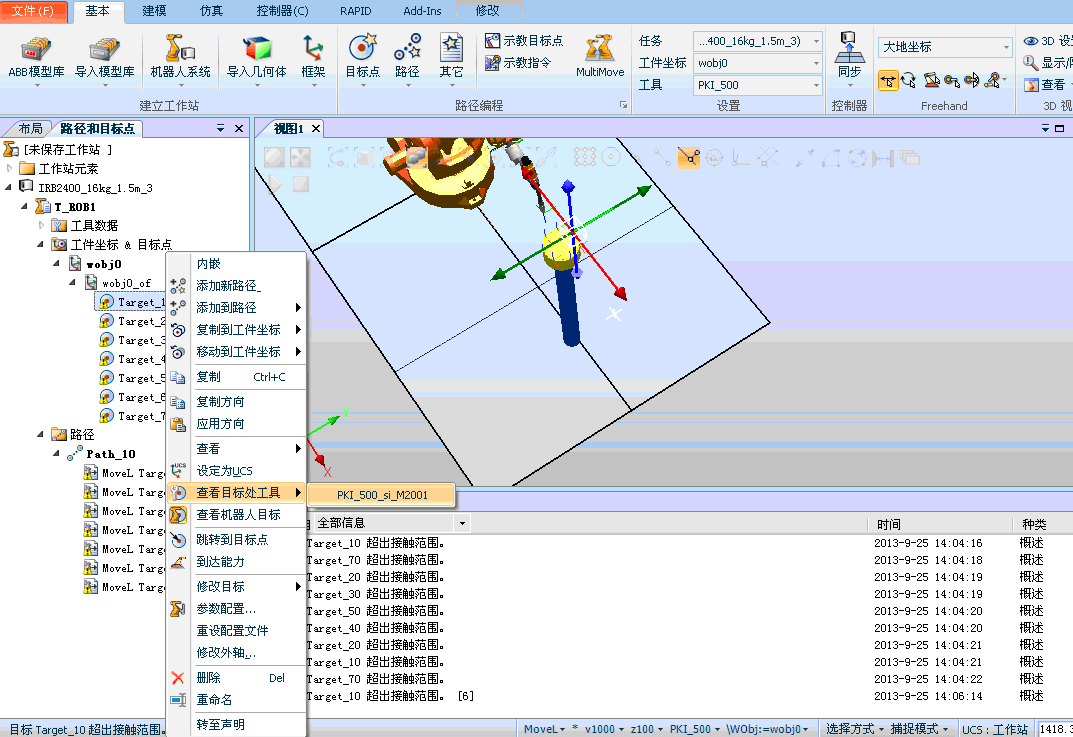
注3:当机器人到达目标点的姿态不好时,可以调整工具的姿态。
注5:参数配置必须每个点单独配置。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号