

CVPR2020_Improved Few-Shot Visual Classification
文章链接:URL: https://arxiv.org/pdf/1912.03432.pdf
核心概述
本文作者从距离度量角度出发,探讨了现行SoTA FSL方法的优缺点,并且提出了一种simple CNAPS方法,特征提取部分采用的是ResNet18+FiLM层(自适应任务);最终分分类采用了马氏( Mahalanobis)距离。 作者重点论证了马氏距离与现下最常用的欧氏距离(L2)、曼哈顿距离(L1)以及负点积(余弦相似度)等距离度量相比,其在类间差异性求解上的优越点。同时作者认为:影响FSC准确性的关键因素是距离度量的选择,而非特征提取器的鲁棒性。
总结:
-
contribution:
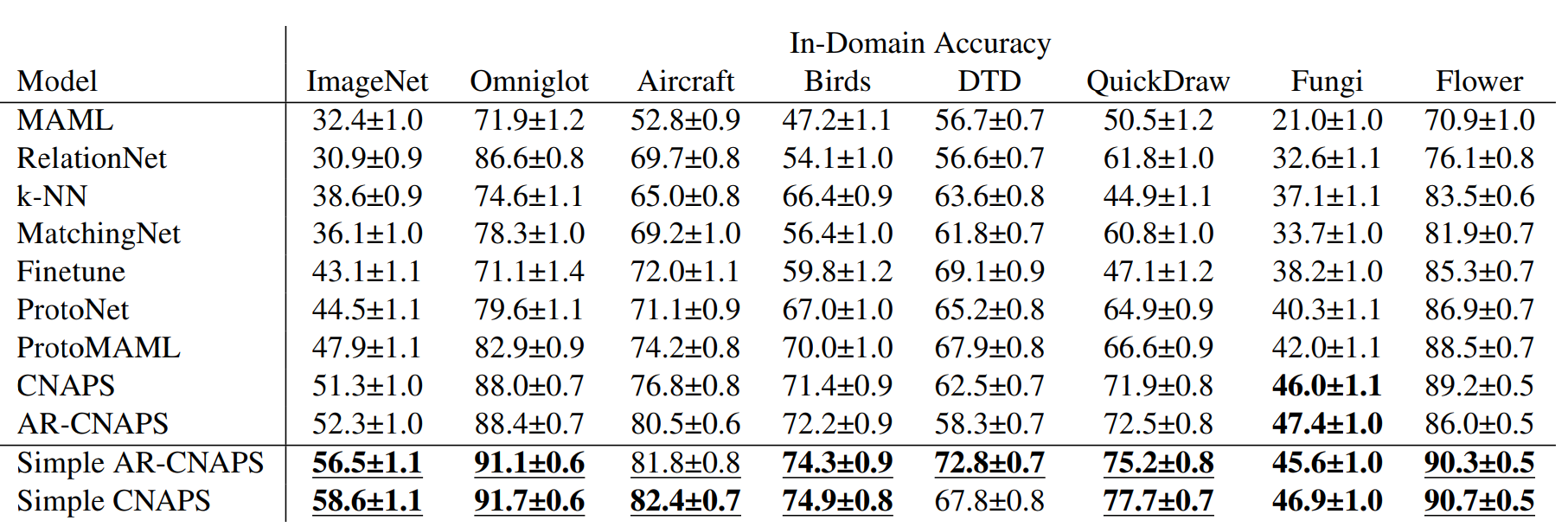
- 分类用了 基于类协方差的距离度量(即马氏距离) ,将CNAPS的性能提升了6.1%。
- 在shot数量极小(4)的情况下,也可以构建class-specific的协方差,使距离求解可行。
- 提出了一种新的“simple-CNAPS”体系结构,极大减少了参数量 (占总数的3.2%-9.2%),分类过程不可学习,参数固定,效果依然很好。
-
why work:
- resnet+FiLM自适应特征提取
- 马氏距离分类(通过求解协方差矩阵,去除各个分量之间的方差,消除了量纲性,并且加入的对数据分布的先验信息更少)。
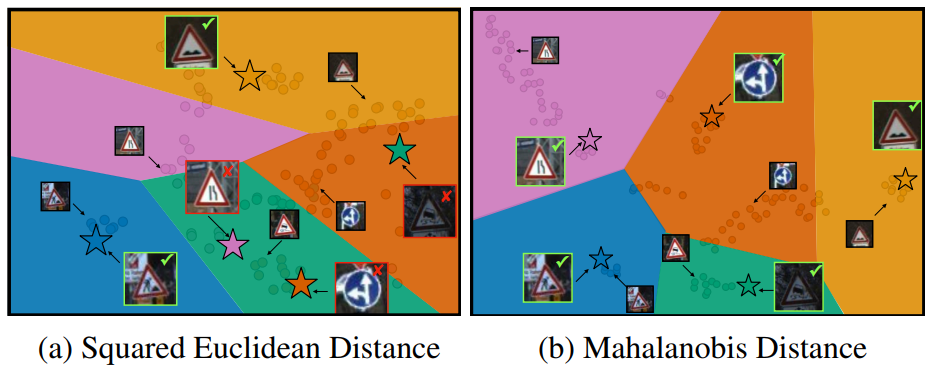
图1:类协方差度量:点代表embedded图像feature, 各个颜色交接处即为类决策边界,五角星代表query image。左图:标准 L2-based距离,即欧式距离, 右图:马氏距离(基于类别协方差的距离度量)。为了方便比较,我们把有图做了空间转换,即搞成了线性分割面。数据集:features: out-of-domain Traffic Signs dataset。该任务共包含五个类共112个support samples, 每个类一个query instance。我们(右)的决策边界与support embedding对齐的更好,并且全都分类正确,基于L2的分类器有三类都分错了。
算法部分
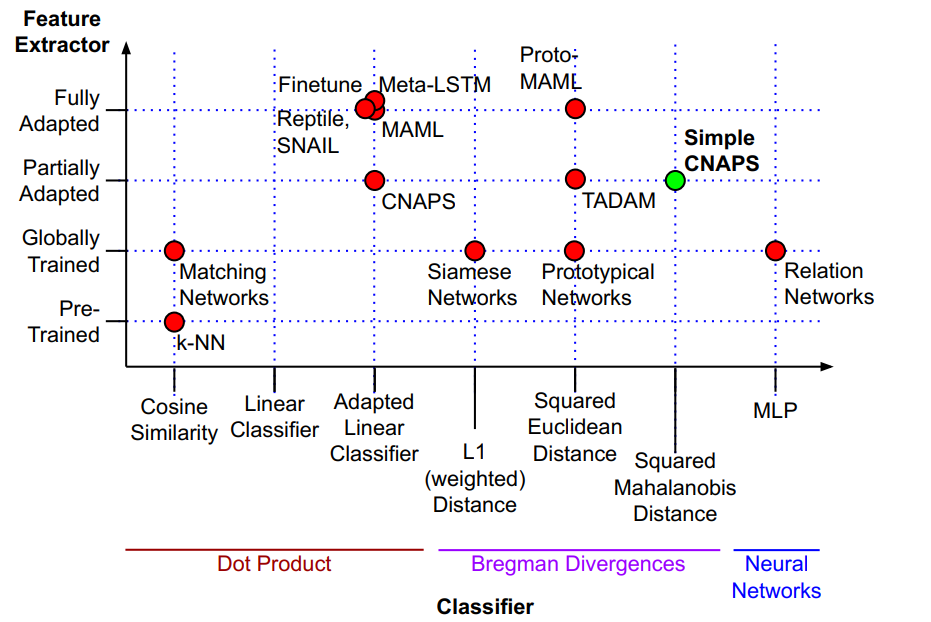
下图是对现行FSL方法的可视化。横轴:特征提取器的自适应性策略;纵轴:分类方法。
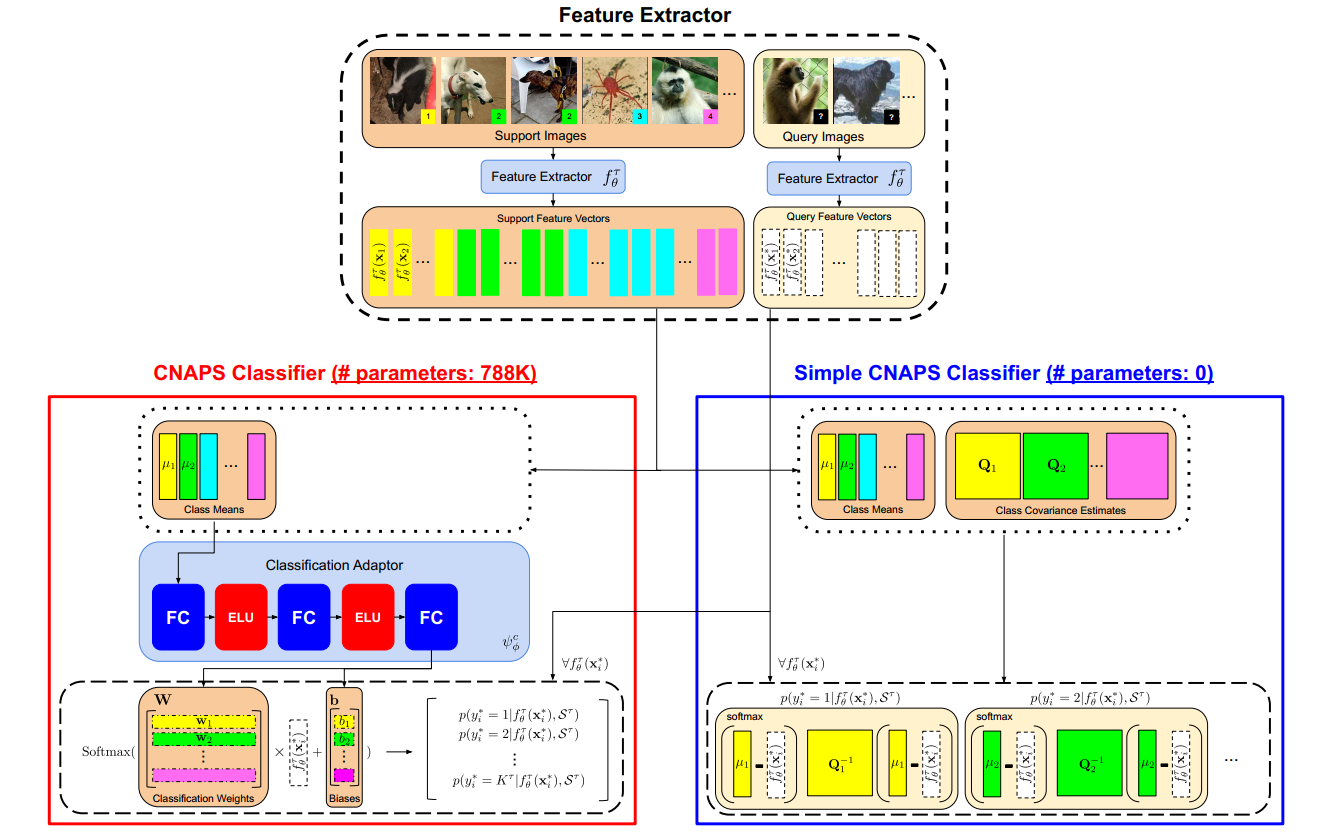
模型结构图如下图所示。作者是在CNAPS模型基础上开发的,特征提取部分的结构相同,都是部分自适应的结构(ResNet18+FiLM层:自适应模块,对每个block的feature做适配当前任务的shift+scale,用support set训得),主要差异在于分类上,原始的CNAPS采用的是一个可学习的线性分类器,最后经过softmax处理得到分类结果,本文的simple-CNAPS直接采用马氏距离进行距离求解,没有参数,只需要计算协方差矩阵即可,
即分类结果=softmax( \(D_M\) (suport mean embedding, query embedding))。
1. feature extractor:
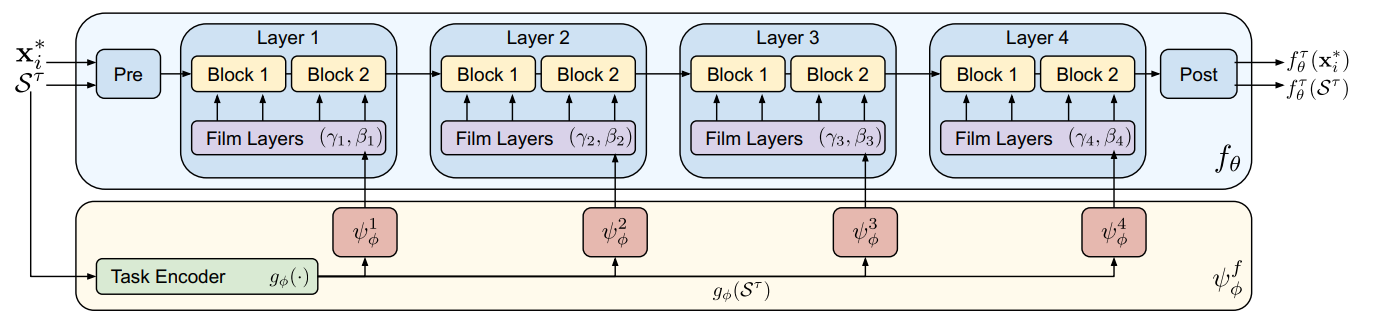
resnet18的feature blocks在imagenet上做了预训练,然后将每个block出的support feature送到一个FiLM层 \(\psi_\phi^i\) 学习自适应参数 \((\gamma_i, \beta_i)\) ,训好的 \(\psi_\phi^i\) 对i层的coarse feature做shift+scale处理,使feature适配当前任务,忽略非相关特征区域(类似于attention)。
2. classification
2.1 老版的CNAPS:
分类通过一个可学习的线性分类adapter完成。分类结果= \(softmax(W f_\theta^\Gamma(x_i^*)+b)\) ,W和b由分类自适应网络 \(\psi_\phi^c\) 产生。
对于类别k,对应行(第k行)的类权重是 \(\psi_\phi^c(\mu_k)\) 的类均值 \(\mu_k\)(平均池化) 。
2.2 simple-CNAPS
分类概率计算公式(k表示第k类):
其中 \(d_k\) 即为马氏距离:
\(Q^\Gamma_k\) 是task and class-specific的协方差矩阵。考虑到support set中shot数量可能远小于特征空间维度,对协方差矩阵做正则化(保证可逆):
其中 \(\Sigma_k^\Gamma\) 是类内( class-within-task)协方差矩阵, \(\Sigma^\Gamma\) 是类间(all-classes-in-task)协方差矩阵(忽略类别信息。 疑问: \(\mu\) 如何解?所有embedding做平均池化?)。 \(\Sigma_k^\Gamma\) 表达式( \(S^\Gamma\) :support set ):
作者将比例 \(\lambda\) 定义为: \(\lambda_\Gamma^k =|S_\Gamma^k|/(|S_\Gamma^k|+1)\) 。
- 当 \(|S_\Gamma|=1,Q_\Gamma^k= 0.5\Sigma^\Gamma +\beta I\) , 此时 \(Q_\Gamma^k\) 依赖于正则化参数β的大小(接近欧氏距离)。
- 当 \(|S_\Gamma^k|=2,\lambda_\Gamma^k =2/3,Q_\Gamma^k=2/3\Sigma_k^\Gamma+1/3\Sigma^\Gamma+\beta I\) ,即 \(Q_\Gamma^k\) 此时受类内协方差的影响更大,受all-classes-in-task协方差矩阵 \(\Sigma^\Gamma\) 的影响更小。
- 在high-shot情况下, \(\lambda_\Gamma^k\) 的值趋近于1,即完全受类内协方差矩阵影响(class-level covariance)。
直观理解: shot数量越多, \(\lambda_\Gamma^k\) 越大,class-within-task协方差 \(\Sigma_k^\Gamma\) 的估计越准确,\(Q_\Gamma^k\) 的值应由 \(\Sigma_k^\Gamma\) 决定。 作者还考虑了把 \(\lambda_\Gamma^k\) 设置为可学习参数的方法,结果表明就这种直接设定的方式效果最好。
经过softmax(马氏距离),等价于多元高斯分布:
高斯混合系数 \(\pi_k=1/k\) (系数相等,每个分量的contribution相同。类比欧氏距离,其约定高斯分量在 \(\mu_k\) 附近服从方差为1 \(Q_k^\Gamma=1\) 的单位正态分布,即提前设定了每个类别的方差是一致的)。

Experiment Detail
数据集: meta-datasets: ILSVRC-2012(ImageNet),Omnilot ,FGVC-Aircraft,CUB-200-2011(Birds),Describable Textures(DTD),QuickDraw ,FGVCx Fungi(Fungi),VGG Flower(Flower),Traffic Signs (Signs)和MSCOCO。前八个训练,后两个测试(域外), 前八个中选了少量做域内测试。

与其他距离度量的对比(L1, squared L2,负点积)

Thoughts
算法结构比较简单,大多在理论论述,创新点主要在于马氏距离应用到特征空间的距离度量上。作者认为特征提取器的构建对最终分类准确性的影响没有“分类指标”的影响大,个人认为feature embedding这一步还是很重要的,可以考虑更end-to-end的结构,比如attention这种,另外作者也没说是在哪一个block出来的feature上求距离,考虑多尺度都做会不会提点?

