Zookeeper--安装部署
- 本地模式安装部署
- 安装前准备
- 安装jdk
- 拷贝Zookeeper安装到lnux系统下
- 解压到指定的目录
- tar -zxvf 安装包 -C 指定的安装目录
- 配置修改
-
将/opt/module/zookeeper-3.4.10/conf这个路径下的z00 sample.cfg修改为zo0.cfg;
mv zoo_sample.cfg zoo.cfg -
打开zoo.cfg文件,修改dataDir路径:。
vim zoo.cfg
修改如下内容: dataDir=/opt/zookeeper-3.4.10/zkDatav -
(3)在/opt/zookeeper-3.4.10/这 个目录上创建zkData文件夹。
mkdir zkData 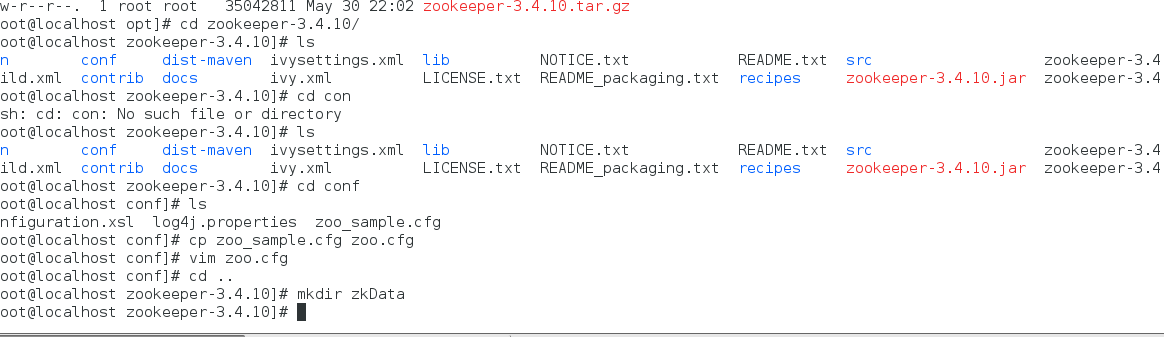
-
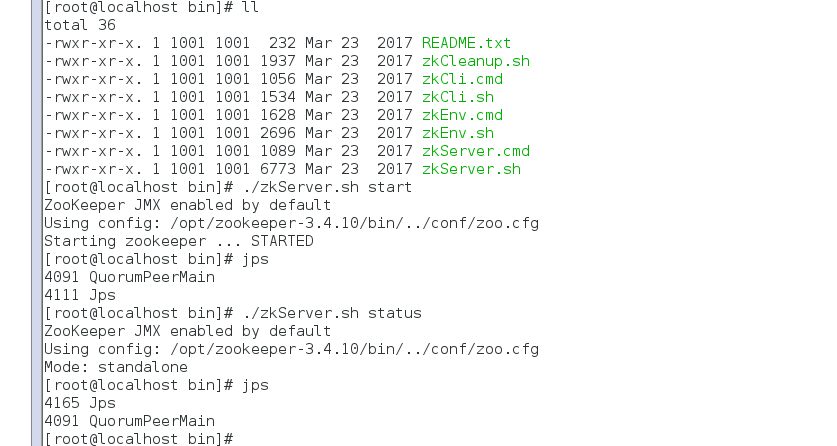
- 操作Zookeeper
- 打开bin目录,启动 zkServer.sh
- 打开服务器:./zkServer.sh start 查看服务器的状态: ./zkServer.sh status
- 启动服务端 :./zkCli.sh
- 使用 ls / 查看根目录,
- 推出客服端 : quit
- 推出服务端:./zkServer stop
- 安装前准备
-
配置参数的解读
-
Zookeeper中的配置文件zoo.cfg中参数含义解读如下:
-
tickTime =2000:通信心跳数,Zookeeper服务器与客户端心跳时间,单位毫秒。
Zookeeper使用的基本时间,服务器之间或客户端与服务器之间维持心跳的时间间隔,
也就是每个tickTime时间就会发送一一个心跳, 时间单位为毫秒。。
它用于心跳机制,并且设置最小的session超时时间为两倍心跳时间。(session的最 小超
时时间是2*tickTime) -
initLimit =10: LF初始通信时限。
集群中的Follower跟随者服务器与Leader领导者服务器之间初始连接时能容忍的最多心
跳数(tickTime的数量) ,用它来限定集群中的Zookeeper服务器连接到L eader的时限。 -
syncLimit =5: LF同步通信时限。
集群中Leader与Follower之间的最大响应时间单位,假如响应超过syncLimit *
-