USART
串口通信是一种设备间非常常用的串行通行方式,其简单便捷,大部分电子设备都支持。
一、物理层
常用RS-232标准,主要规定了信号的用途、通信接口以及信号的电平标准。 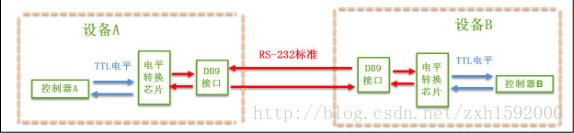
“DB9接口”之间通过串口信号线建立起连接,串口信号线使用”RS-232标准“传输数据信号,这些信号通过记过电平转换芯片转换成控制器能识别的TLL标准的电平信号,才能实现通信。
1.电平标准
可分为TTL标准以及RS-232标准。
常见的电子电路中常见TTL的电平标准,理想状态使用5V表示二进制逻辑1,0V表示逻辑0;而为了增加串口通信的远距离传输以及抗干扰能力,RS-232使用-15V表示逻辑1,+15V表示逻辑0。 
因为控制器一般使用TTL电平标准,所以常常使用MA3232芯片将TTL以及RS-232电平的信号进行互相转换。
2.RS-232信号线
最初RS-232串口标准常用于计算机、路由与调制调节器(“猫”)之间通信,设备被分为数据终端设备DTE(计算机、路由)和数据通信设备DCE(调制调节器)。旧台式计算机,一般都有RS-232标准的COM口,也称DB9接口。
DB9信号线说明
- 1
- 2

公头标准接法,只要使用直通型串口线连接起来即可。
二、协议层
协议层中,规定了数据包的内容,它由起始位、主体数据、校验位以及停止位组成,通信双方的数据包格式要约定一致才能正常收发数据 。
1、波特率
异步通信中由于没有时钟信号,所以2个通信设备需约定好波特率,常见的有4800、9600、115200等。
2、通信的起始和停止信号
串口通信的一个数据包从起始信号开始,知道停止信号结束。数据包的起始信号由一个逻辑0的数据位表示,而数据包的停止信号可由0.5、1、1.5或2个逻辑1的数据位表示,只要双方约定一致即可。
3、有效数据
在数据包的起始位之后紧接着的就是要传输的主体数据内容,也称为有效数据,有效
数据的长度常被约定为 5、6、7或 8位长
4、数据校验
在有效数据之后,有一个可选的数据校验位。由于数据通信相对容易受到外部干扰导致传输数据出现偏差,可以在传输过程加上校验位来解决这个问题。校验方法有奇校验(odd)、偶校验(even)、0校验(space)、1校验(mark)以及无校验(noparity)。
奇校验要求有效数据和校验位中“1”的个数为奇数,比如一个 8 位长的有效数据为:01101001,此时总共有 4 个“1”,为达到奇校验效果,校验位为“1”,最后传输的数据将是 8 位的有效数据加上 1 位的校验位总共 9 位。
偶校验与奇校验要求刚好相反,要求帧数据和校验位中“1”的个数为偶数,比如数据帧:11001010,此时数据帧“1”的个数为 4 个,所以偶校验位为“0”。
0 校验是不管有效数据中的内容是什么,校验位总为“0”,1 校验是校验位总为“1”。
三、STM32的USART简介
通用同步异步收发器是一个串行通信设备,可以灵活的与外部设备进行全双工数据交换。有别与USART,还有一个UART,它在USART基础上裁剪掉了同步通信功能,只有异步通信。简单区分同步和异步就是看通信时需不需要对外提供时钟输出,我们平时用的串口通信基本都是 UART。
串口通信一般是以帧格式传输数据,即一帧一帧传输,每帧包含有起始信号、数据信息、停止信息,可能还有校验信息。
USART 满足外部设备对工业标准 NRZ 异步串行数据格式的要求,并且使用了小数波特率发生器,可以提供多种波特率,使得它的应用更加广泛。USART 支持同步单向通信和半双工单线通信;还支持局域互连网络 LIN、智能卡(SmartCard)协议与 lrDA(红外线数据协会) SIR ENDEC规范。
USART支持使用 DMA,可实现高速数据通信。
四、USART功能框图剖析 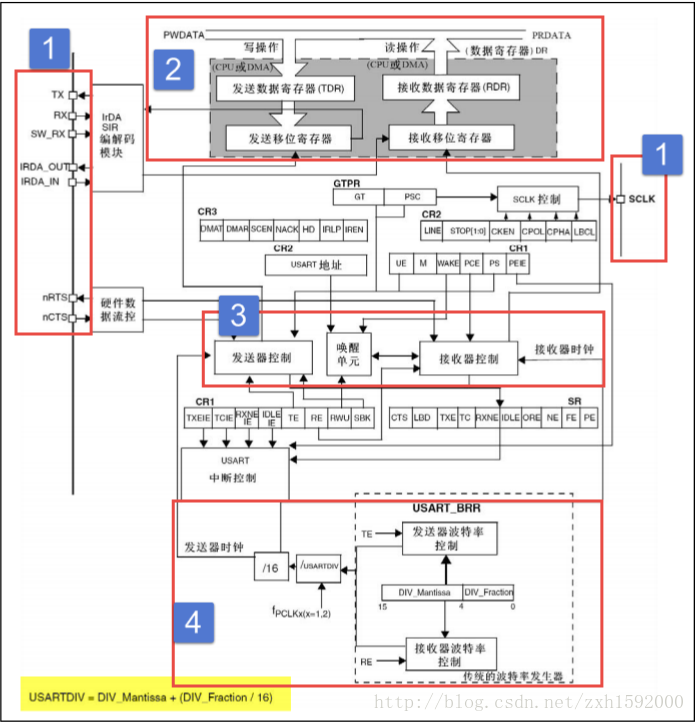
下文结合图片看加深理解。
1、功能引脚
TX:发送数据输出引脚。
RX:接收。
SW_RX:数据接收引脚,属于内部引脚。
nRTS:请求以发送,n表示低电平有效。如果使能 RTS 流控制,当USART接收器准备好接收新数据时就会将nRTS变成低电平;当接收寄存器已满时,nRTS将被设置为高电平。该引脚只适用于硬件流控制。
nCTS:清除以发送(Clear To Send),n表示低电平有效。如果使能 CTS流控制,发送器在发送下一帧数据之前会检测 nCTS 引脚,如果为低电平,表示可以发送数据,如果为高电平则在发送完当前数据帧之后停止发送。该引脚只适用于硬件流控制。
SCLK:发送器时钟输出引脚。这个引脚仅适用于同步模式。
USART:下图是STM32F103VET6芯片的USART引脚 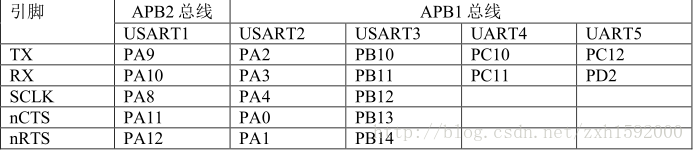
USART1的时钟来源于APB2总线时钟,最大频率为72MHZ,其他4个时钟来源于APB1总线时钟,最大频率36MHZ。UART只有异步传输功能,没有SCLK、nCTS和nRTS功能引脚。
2.数据寄存器
USART说数据寄存器(USART_DR)只有低 9 位有效,并且第 9 位数据是否有效要取决于USART 控制寄存器 1(USART_CR1)的 M 位设置,当 M 位为 0 时表示 8 位数据字长,当 M位为 1 表示 9 位数据字长,我们一般使用 8位数据字长。
USART_DR包含了已发送的数据或者接收到的数据。USART_DR实际是包含了两个寄存器,一个专门用于发送的可写 TDR,一个专门用于接收的可读 RDR。当进行发送操作时,往 USART_DR写入数据会自动存储在 TDR内;当进行读取操作时,向 USART_DR读取数据会自动提取 RDR 数据。
TDR和RDR都是介于系统总线和移位寄存器之间。串行通信是一个位一个位传输的,发送时把 TDR 内容转移到发送移位寄存器,然后把移位寄存器数据每一位发送出去,接时把接收到的每一位顺序保存在接收移位寄存器内然后才转移到 RDR。
USART 支持 DMA 传输,可以实现高速数据传输。
3.控制器
USART有专门控制发送的发送器、控制接收的接收器,还有唤醒单元、中断控制等。
使用USART之前需要向USART_CR1寄存器的UE位置1使能USART,UE位用于开启供给串口的时钟。发送或者接收数据字长可选8或9位,由USARTT_CR1的M位控制。
1)发送器
当USART_CR1寄存器的发送使能位TE置1时,启动数据发送,发送移位寄存器的数据会在TX引脚输出,低位在前,高位在后。如果是同步模式SCLK也输出时钟信号。
一个字符帧发送需要3部分:起始位、数据帧、停止位。起始位是一个位周期的低电平,位周期就是每一位占用的时间 ;数据帧就是我们要发送的8或9位数据,数据是最低位开始传输的;停止位是一定时间周期的高电平。
停止位的时间长短可以通过USART控制寄存器2(USART_CR2)的STOP[1:0]位控制,可选0.5个、1个、1.5个、2个停止位。默认使用1个停止位。2个停止位适用于正常USART模式、单线模式和调制解调器模式。0.5和1.5个停止位用于智能卡模式。
当发使能位TE置1之后,发送器开始会发送一个空闲帧(一个数据帧长度的高电平),接下来就可以往USART_DR寄存器写入要发送的数据。在写入最后一个数据后,需等待USART状态寄存器(USART_SR)的TC位为1,表示数据传输完成。USART_CR1寄存器的TCIE位置1,则产生中断。
发送数据时,几个重要的标志位如下:
TE:发送使能。
TXE:发送寄存器为空,发送单个字节时使用。
TC:发送完成,发送多个字节数据时候使用。
TXIE:发送完成中断使能。
2)接收器
将CR1寄存器的RE位置1,使能USART接收,使得接收器在RX线开始搜索起始位。在确定起始位后,就根据RX线电平状态把数据存放在接收移位寄存器内。接收完成后就把接收移位寄存器的数据移到PDR内,并把USART_SR寄存器的RXNE位置。如果USART_CR2寄存器的RXNEIE置1可以产生中断。
接收数据时,几个重要的标志位如下:
RE: 接收使能。
RXNE:读数据寄存器非空。
RXNEIE:发送完成中断使能。
4.小数波特率生成
USART 的发送器和接收器使用相同的波特率。计算公式如下: 
其中,f PLCK 为 USART 时钟, USARTDIV 是一个存放在波特率寄存器(USART_BRR)的一个无符号定点数。其中 DIV_Mantissa[11:0]位定义 USARTDIV 的整数部分,DIV_Fraction[3:0]位定义 USARTDIV 的小数部分。
例如:DIV_Mantissa=24(0x18),DIV_Fraction=10(0x0A),此时 USART_BRR 值为0x18A;那么USARTDIV的小数位10/16=0.625;整数位24,最终USARTDIV的值为24.625。
如果知道 USARTDIV 值为 27.68,那么 DIV_Fraction=16*0.68=10.88,最接近的正整数为 11,所以 DIV_Fraction[3:0]为 0xB;DIV_Mantissa=整数(27.68)=27,即为 0x1B。
波特率的常用值有 2400、9600、19200、115200。下面以实例讲解如何设定寄存器值得到波特率的值。
我们知道 USART1 使用 APB2 总线时钟,最高可达 72MHz,其他 USART 的最高频率为 36MHz。我们选取 USART1 作为实例讲解,即 f PLCK =72MHz。为得到 115200bps 的波特率,此时:
115200 =72000000/(16 ∗ USARTDIV)
解 得 USARTDIV=39.0625 , 可 算 得 DIV_Fraction=0.0625*16=1=0x01 ,DIV_Mantissa=39=0x17,即应该设置 USART_BRR 的值为 0x171。
5.校验控制
STM32F103系列控制器USART支持奇偶校验。使用校验位时,串口传输的长度将在8位数据帧上加上1位的校验位,总共9位,此时USART_CR1寄存器的M位需要设置位1,即9数据位。将USART_CR1寄存器的PCE位置1就可以启动奇偶校验控制,奇偶校验由硬件自动完成。启动了奇偶校验控制之后,发送数据帧时会自动添加校验位,接收数据自动验证校验位。接收数据时如果出现奇偶校验位验证失败,会将USART_SR寄存器的PE置1,并可以产生奇偶校验中断。
使用了奇偶校验控制位后,每个字符帧的格式变成了:起始位+数据帧+校验位+停止位。
6.中断控制

五、USART初始化结构体
初始化结构体的定义在stm32f10x_usart.h文件中,初始化库函数定义在stm32f10x_usart.c中。
USART初始化结构体
typedef struct {
uint32_t USART_BaudRate; // 波特率
uint16_t USART_WordLength; // 字长
uint16_t USART_StopBits; // 停止位
uint16_t USART_Parity; // 校验位
uint16_t USART_Mode; // USART 模式
uint16_t USART_HardwareFlowControl; // 硬件流控制
} USART_InitTypeDef;
1)USART_BaudRate:波特率设置。标准库函数会根据设定值计算得到USARTDIV值,从而设置USART_BRR的寄存器值。
2)USART_WordLength:.数据帧字长,它设定USART_CR1寄存器M位的值。如果没有使能奇偶位校验控制,一般使用8数据位。
3)USART_StopBits停止位设置。
4)USART_Parity:奇偶校验控制选择。
5)USART_Mode:USART模式选择有USART_Mode_Rx和USART_Mode_Tx,允许使用逻辑或运算选择两个,它设定 USART_CR1寄存器的 RE 位和 TE位。
6)USART_HardwareFlowControl:硬件流控制选择,只有在硬件流控制模式下才有效,可选有,使能RTS、使能CTS、同时使能RTS和CTS、不使用硬件流。
当使用同步模式,需配置SCLK引脚输出脉冲的属性,标准库使用一个时钟初始化结构体USART_ClockInitTypeDef来设置,该结构体内容只有在同步模式下才设置。
USART时钟初始化结构体
typedef struct {
uint16_t USART_Clock; // 时钟使能控制
uint16_t USART_CPOL; // 时钟极性
uint16_t USART_CPHA; // 时钟相位
uint16_t USART_LastBit; // 最尾位时钟脉冲
} USART_ClockInitTypeDef;
1)USART_Clock:同步模式下SCLK引脚上时钟输出使能控制,可选禁止时钟输出(USART_Clock_Disable)或开启时钟输出(USART_Clock_Enable);如果使用同步模式发送,一般都需要开启时钟。它设定 USART_CR2 寄存器的 CLKEN 位的值。 ݶ
2)USART_CPOL:同步模式下 SCLK 引脚上输出时钟极性设置,可设置在空闲时SCLK引脚为低电平(USART_CPOL_Low)或高电平(USART_CPOL_High)。它设定USART_CR2寄存器的 CPOL位的值。
3)USART_CPHA:同步模式下 SCLK 引脚上输出时钟相位设置,可设置在时钟第一个变化沿捕获数据(USART_CPHA_1Edge)或在时钟第二个变化沿捕获数据。它设定 USART_CR2寄存器的 CPHA位的值。USART_CPHA与 USART_CPOL配合使用可以获得多种模式时钟关系。
4)USART_LastBit:选择在发送最后一个数据位的时候时钟脉冲是否在SCLK引脚输出,可以是不输出脉冲(USART_LastBit_Disable) 、 输出脉冲(USART_LastBit_Enable)。它设定 USART_CR2 寄存器的 LBCL位的值。
六、USART1接发通信实验
USART 只需两根信号线即可完成双向通信,对硬件要求低,使得很多模块都预留USART 接口来实现与其他模块或者控制器进行数据传输,比如 GSM 模块,WIFI 模块、蓝牙模块等等。在硬件设计时,注意还需要一根“共地线”。
来编写一个程序实现开发板与电脑通信,在开发板上电时通过USART发送一串字符串给电脑,然后开发板进入中断接收等待状态,如果电脑有发送数据过来,开发板就会产生中断,我们在中断服务函数接收数据,并马上把数据返回发送给电脑。
1、编程思路
1) 使能 RX和 TX 引脚 GPIO时钟和 USART时钟;
2) 初始化 GPIO,并将 GPIO复用到 USART上;
3) 配置 USART 参数;
4) 配置中断控制器并使能 USART接收中断;
5) 使能 USART;
6) 在 USART接收中断服务函数实现数据接收和发送。
2、代码分析
1)GPIO和USART宏定义
/**
* 串口宏定义,不同的串口挂载的总线和 IO 不一样,移植时需要修改这几个宏
*/
// 串口 1-USART1
#define DEBUG_USARTx USART1
#define DEBUG_USART_CLK RCC_APB2Periph_USART1
#define DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200
// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOA)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_TX_GPIO_PORT GPIOA
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_9
#define DEBUG_USART_RX_GPIO_PORT GPIOA
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_10
#define DEBUG_USART_IRQ USART1_IRQn
#define DEBUG_USART_IRQHandler USART1_IRQHandler使用宏定义方便程序移植和升级 。开发板中的 CH340G 的收发引脚默认通过跳帽连接到 USART1,如果想使用其他串口,可以把 CH340G 跟 USART1 直接的连接跳帽拔掉,然后再把其他串口的 IO用杜邦线接到 CH340G的收发引脚即可。
这里我们使用USART1,设定波特率为115200,选定USART的GPIO为PA9和PA10。
2)嵌套向量中断控制器NVIC配置
static void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 嵌套向量中断控制器组选择 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* 配置 USART 为中断源 */
NVIC_InitStructure.NVIC_IRQChannel = DEBUG_USART_IRQ;
/* 抢断优先级为 1 */
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
/* 子优先级为 1 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
/* 使能中断 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
/* 初始化配置 NVIC */
NVIC_Init(&NVIC_InitStructure);
}3)USART初始化配置
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// 打开串口 GPIO 的时钟
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
// 打开串口外设的时钟
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
// 将 USART Tx 的 GPIO 配置为推挽复用模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将 USART Rx 的 GPIO 配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
// 配置串口的工作参数
// 配置波特率
USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;
// 配置 针数据字长
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// 配置停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// 配置校验位
USART_InitStructure.USART_Parity = USART_Parity_No ;
// 配置硬件流控制
USART_InitStructure.USART_HardwareFlowControl =
USART_HardwareFlowControl_None;
// 配置工作模式,收发一起
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// 完成串口的初始化配置
USART_Init(DEBUG_USARTx, &USART_InitStructure);
// 串口中断优先级配置
NVIC_Configuration();
// 使能串口接收中断
USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE);
// 使能串口
USART_Cmd(DEBUG_USARTx, ENABLE);
}调用RCC_APB2PeriphClockCmd函数开启GPIO端口时钟,使用GPIO之前必须开启对应的时钟。RCC_APB2PeriphClockCmd函数开启USART时钟。
使用GPIO之前需要初始化配置它,并且还要添加特殊设置,因为我们使用它作为外设引脚,一般都有特殊功能,模式设置为复用功能,把串口的Tx引脚配置为复用推挽输出,Rx引脚为浮空输入,数据完全由外部输入决定。
配置USAT1通信参数为:波特率115200,字长8,1个停止位,没有校验位,不使用硬件流控制,收发一体工作模式,然后调用USART初始化函数完成配置。
USART接收中断,需要配置NVIC,这里调用NVIC_Configuration函数完成配置,然后调用USART_ITConfig函数使能USART接收中断。
最后 调用USART_Cmd函数使能USART,最终配置的是USART_CR1的UE位,具体作用是开启USART工作时钟,没有时钟那USART这个外设就工作不了。
4)字符发送
/***************** 发送一个字符 **********************/
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch)
{
/* 发送一个字节数据到 USART */
USART_SendData(pUSARTx,ch);
/* 等待发送数据寄存器为空 */
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
/***************** 发送字符串 **********************/
void Usart_SendString( USART_TypeDef * pUSARTx, char *str)
{
unsigned int k=0;
do {
Usart_SendByte( pUSARTx, *(str + k) );
k++;
} while (*(str + k)!='\0');
/* 等待发送完成 */
while (USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET) {
}
}Usart_SendByte用来指定USART发送一个ASCLL码字符,它有2个形参:第一个USART第二个待发送的字符,它通过调用库函数USART_SendData来实现等待,并且增加了等待发送完成功能,它接收两个参数:一个是USART,一个是事件标志。这里循环检测发送数据寄存器这个标志,当跳出while循环时,说明发送数据寄存器为空。
Usart_SendString函数用来发送一个字符串,实际调用Usar_SendByte函数发送每个字符,直到遇到空字符才停止发送。最后使用循环检测发送完成的事件标志TC,保证数据完成后才退出函数。
5)USART中断服务函数
void DEBUG_USART_IRQHandler(void)
{
uint8_t ucTemp;
if (USART_GetITStatus(DEBUG_USARTx,USART_IT_RXNE)!=RESET)
{
ucTemp = USART_ReceiveData( DEBUG_USARTx );
USART_SendData(USARTx,ucTemp);
}
}该代码在stm32f10x_it.c文件中的,用来集中存放中断服务函数。当使能了中断并中断发生时,就会执行这里的中断服务函数。
6)main函数
int main(void)
{
/*初始化 USART 配置模式为 115200 8-N-1,中断接收*/
USART_Config();
Usart_SendString( DEBUG_USARTx,"这是一个串口中断接收回显实验\n");
while (1) {
}
}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
USART_Config()函数完成USART初始化配置,包括GPIO USART配置,接收中断使能等。
接下来调用字符发送函数把数据发给串口调试助手。
最后什么也不做,等待接收中断产生,并在中断服务函数中回传数据。
七、USART1指令控制RGB彩灯实验
1、思路要点
1)初始化配置RGB彩色灯GPIO
2)使能RX和TX引脚GPIO时钟和USART时钟
3)初始化GPIO,并将GPIO复用到USART上
4)配置USART参数
5)使能USART
6)获取指令输入,根据控制RGB彩色灯
2、代码分析
1)GPIO和USART宏定义
1 #define DEBUG_USARTx USART1
2 #define DEBUG_USART_CLK RCC_APB2Periph_USART1
3 #define DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd
4 #define DEBUG_USART_BAUDRATE 115200
5
6 // USART GPIO 引脚宏定义
7 #define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOA)
8 #define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
9
10 #define DEBUG_USART_TX_GPIO_PORT GPIOA
11 #define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_9
12 #define DEBUG_USART_RX_GPIO_PORT GPIOA
13 #define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_10
14
15 #define DEBUG_USART_IRQ USART1_IRQn
16 #define DEBUG_USART_IRQHandler USART1_IRQHandler2)USART初始化配置
1 void USART_Config(void)
2 {
3 GPIO_InitTypeDef GPIO_InitStructure;
4 USART_InitTypeDef USART_InitStructure;
5
6 // 打开串口 GPIO 的时钟
7 DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
8
9 // 打开串口外设的时钟
10 DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
11
12 // 将 USART Tx 的 GPIO 配置为推挽复用模式
13 GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
14 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
15 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
16 GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
17
18 // 将 USART Rx 的 GPIO 配置为浮空输入模式
19 GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
20 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
21 GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
22
23 // 配置串口的工作参数
24 // 配置波特率
25 USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;
26 // 配置 针数据字长
27 USART_InitStructure.USART_WordLength = USART_WordLength_8b;
28 // 配置停止位
29 USART_InitStructure.USART_StopBits = USART_StopBits_1;
30 // 配置校验位
31 USART_InitStructure.USART_Parity = USART_Parity_No ;
32 // 配置硬件流控制
33 USART_InitStructure.USART_HardwareFlowControl =
34 USART_HardwareFlowControl_None;
35 // 配置工作模式,收发一起
36 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
37 // 完成串口的初始化配置
38 USART_Init(DEBUG_USARTx, &USART_InitStructure);
39
40 // 使能串口
41 USART_Cmd(DEBUG_USARTx, ENABLE);
42 }与上实验基本一样,唯一不同没使用使能中断
3)重定向printf和scanf函数
1 ///重定向 c 库函数 printf 到串口,重定向后可使用 printf 函数
2 int fputc(int ch, FILE *f)
3 {
4 /* 发送一个字节数据到串口 */
5 USART_SendData(DEBUG_USARTx, (uint8_t) ch);
6
7 /* 等待发送完毕 */
8 while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET);
9
10 return (ch);
11 }
12
13 ///重定向 c 库函数 scanf 到串口,重写向后可使用 scanf、getchar 等函数
14 int fgetc(FILE *f)
15 {
16 /* 等待串口输入数据 */
17 while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET);
18
19 return (int)USART_ReceiveData(DEBUG_USARTx);
20 }fputc函数是printf函数内部的一个函数,功能是将字符ch写入文件指针f所指向文件的当前写指针位置,我们使用USART函数重新修改fputc函数内容,达到类似写入的功能。
fgetc实现字符读取功能。
还有一点需要注意的,使用 fput和 fgetc函数达到重定向 C语言标准库输入输出函数必须在 MDK的工程选项把“Use MicroLIB”勾选上,MicoroLIB 是缺省 C库的备选库,它对标准 C库进行了高度优化使代码更少,占用更少资源。
为使用 printf、scanf 函数需要在文件中包含 stdio.h头文件。
4)输出提示信息
1 static void Show_Message(void)
2 {
3 printf("\r\n 这是一个通过串口通信指令控制 RGB 彩灯实验 \n");
4 printf("使用 USART 参数为:%d 8-N-1 \n",USART_BAUDRATE);
5 printf("开发板接到指令后控制 RGB 彩灯颜色,指令对应如下:\n");
6 printf(" 指令 ------ 彩灯颜色 \n");
7 printf(" 1 ------ 红 \n");
8 printf(" 2 ------ 绿 \n");
9 printf(" 3 ------ 蓝 \n");
10 printf(" 4 ------ 黄 \n");
11 printf(" 5 ------ 紫 \n");
12 printf(" 6 ------ 青 \n");
13 printf(" 7 ------ 白 \n");
14 printf(" 8 ------ 灭 \n");
15 }5)main函数
1 int main(void)
2 {
3 char ch;
4
5 /* 初始化 RGB 彩灯 */
6 LED_GPIO_Config();
7
8 /* 初始化 USART 配置模式为 115200 8-N-1 */
9 USART_Config();
10
11 /* 打印指令输入提示信息 */
12 Show_Message();
13 while (1)
14 {
15 /* 获取字符指令 */
16 ch=getchar();
17 printf("接收到字符:%c\n",ch);
18
19 /* 根据字符指令控制 RGB 彩灯颜色 */
20 switch (ch)
21 {
22 case '1':
23 LED_RED;
24 break;
25 case '2':
26 LED_GREEN;
27 break;
28 case '3':
29 LED_BLUE;
30 break;
31 case '4':
32 LED_YELLOW;
33 break;
34 case '5':
35 LED_PURPLE;
36 break;
37 case '6':
38 LED_CYAN;
39 break;
40 case '7':
41 LED_WHITE;
42 break;
43 case '8':
44 LED_RGBOFF;
45 break;
46 default:
47 /* 如果不是指定指令字符,打印提示信息 */
48 Show_Message();
49 break;
50 }
51 }
52 }首先我们定义一个字符变量来存放接收到的字符。
接下来调用 LED_GPIO_Config 函数完成 RGB 彩色 GPIO 初始化配置,该函数定义在bsp_led.c 文件内。
调用 USART_Config 函完成 USART初始化配置。
Show_Message函数使用 printf 函数打印实验指令说明信息。
getchar函数用于等待获取一个字符,并返回字符。我们使用 ch变量保持返回的字符,接下来判断 ch内容执行对应的程序。
我们使用 switch语句判断 ch 变量内容,并执行对应的功能程序。
来源:https://blog.csdn.net/zxh1592000/article/details/78656609

 浙公网安备 33010602011771号
浙公网安备 33010602011771号