

0-1write MC/OS __Basics3
| 2021-07-23 09:40:45 星期五 |
七、就绪列表
在μC/OS-III中,任务被创建后,任务的TCB会被放入就绪列表中,表示任务在就绪,随时可能被运行。 就绪列表包含一个表示任务优先级的优先级表,一个存储任务TCB的TCB双向链表。
1、优先级表
优先级表在代码层面上来看,就是一个数组
/* 定义优先级表 */
CPU_DATA OSPrioTbl[OS_PRIO_TBL_SIZE];
#define OS_PRIO_TBL_SIZE((OS_CFG_PRIO_MAX - 1u) / (DEF_INT_CPU_NBR_BITS) + 1u);//OS_CFG_PRIO_MAX表示支持多少个优先级,DEF_INT_CPU_NBR_BITS定义CPU整型数据有多少位
OS_PRIO_TBL_SIZE的值为1, 即优先级表只需要一个成员即可表示32个优先级。如果要支持64个优先级,即需要两个成员
优先级表时如何跟任务的优先级联系起来的?
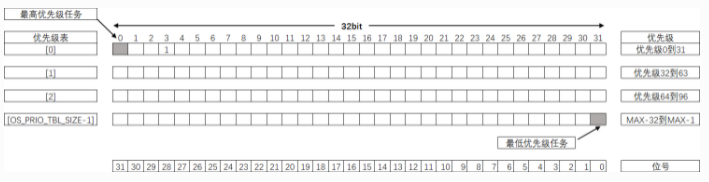
优先级表中每个成员类型为32位,可以表示32个优先级。
假如创建一个优先级为3的任务,就将位【31-3】置1,位31表示的是优先级最高的任务,以此递减,位0表示的是最低的优先级。
1.1、优先级表函数讲解

-
OS_PrioInit()
/* 初始化优先级表 */
void OS_PrioInit( void )
{
CPU_DATA i;
/* 默认全部初始化为0 */
for ( i=0u; i<OS_PRIO_TBL_SIZE; i++ )
{
OSPrioTbl[i] = (CPU_DATA)0;
}
}
-
OS_PrioInsert()
/* 置位优先级表中相应的位 */
void OS_PrioInsert (OS_PRIO prio)
{
CPU_DATA bit;
CPU_DATA bit_nbr;
OS_PRIO ix;
/* 求模操作,获取优先级表数组的下标索引 */
ix = prio / DEF_INT_CPU_NBR_BITS;//定位prio这个优先级对应优先级表数组的哪个成员,假设prio=3,则ix=0;
/* 求余操作,将优先级限制在DEF_INT_CPU_NBR_BITS之内 */
bit_nbr = (CPU_DATA)prio & (DEF_INT_CPU_NBR_BITS - 1u);
/* 获取优先级在优先级表中对应的位的位置 */
bit = 1u;
bit <<= (DEF_INT_CPU_NBR_BITS - 1u) - bit_nbr;//假设prio等于3,那么bit就等于28.
/* 将优先级在优先级表中对应的位置1 */
OSPrioTbl[ix] |= bit;
}
-
OS_PrioRemove()
/* 清除优先级表中相应的位 */
void OS_PrioRemove (OS_PRIO prio)
{
CPU_DATA bit;
CPU_DATA bit_nbr;
OS_PRIO ix;
/* 求模操作,获取优先级表数组的下标索引 */
ix = prio / DEF_INT_CPU_NBR_BITS;
/* 求余操作,将优先级限制在DEF_INT_CPU_NBR_BITS之内 */
bit_nbr = (CPU_DATA)prio & (DEF_INT_CPU_NBR_BITS - 1u);
/* 获取优先级在优先级表中对应的位的位置 */
bit = 1u;
bit <<= (DEF_INT_CPU_NBR_BITS - 1u) - bit_nbr;
/* 将优先级在优先级表中对应的位清零 */
OSPrioTbl[ix] &= ~bit;
}
-
OS_PrioGetHighest()
/* 获取最高的优先级 */
OS_PRIO OS_PrioGetHighest (void)
{
CPU_DATA *p_tbl;
OS_PRIO prio;
prio = (OS_PRIO)0;
/* 获取优先级表首地址 */
p_tbl = &OSPrioTbl[0];//从头开始搜索整个优先级表,直到找到最高的优先级。
/* 找到数值不为0的数组成员 */
while (*p_tbl == (CPU_DATA)0)
{
prio += DEF_INT_CPU_NBR_BITS;
p_tbl++;
}
/* 找到优先级表中置位的最高的优先级 */
prio += (OS_PRIO)CPU_CntLeadZeros(*p_tbl);//
return (prio);
}
按照从高位到低位的顺序查找第一个置1的位的方法是通过计算前导0函数CPU_CntLeadZeros()来实现的。 从高位开始找1叫计算前导0,从低位开始找1叫计算后导0。
调用CPU_CntLeadZeros()可以计算出OSPrioTbl[0]第一个置1的位前面有3个0,那么这个3就是我们要查找的最高优先级, 至于后面还有多少个位置1我们都不用管,只需要找到第一个1即可。
CPU_CntLeadZeros()函数可由汇编或者C来实现,如果使用的处理器支持前导零指令CLZ,可由汇编来实现,加快指令运算,如果不支持则由C来实现。
Cortex-M系列处理器自带CLZ指令,所以CPU_CntLeadZeros()函数默认由汇编编写。
2、就绪列表
准备好运行的任务的TCB都会被放到就绪列表中,系统可随时调度任务运行。就绪列表在代码的层面上看就是一个 OS_RDY_LIST数据类型的数组OSRdyList[],数组的大小由宏OS_CFG_PRIO_MAX决定,支持多少个优先级, OSRdyList[]就有多少个成员。任务的优先级与OSRdyList[]的索引一一对应,比如优先级3的任务的TCB会被放到OSRdyList[3]中。
/* 就绪列表定义 */
OS_EXT OS_RDY_LIST OSRdyList[OS_CFG_PRIO_MAX];
typedefstruct os_rdy_list OS_RDY_LIST;
struct os_rdy_list {
OS_TCB *HeadPtr;
OS_TCB *TailPtr;
OS_OBJ_QTY NbrEntries;//表示OSRdyList[]同一个索引下有多少个任务。
};
//OSRdyList[]的成员与任务的优先级一一对应, 同一个优先级的多个任务会以双向链表的形式存在OSRdyList[]同一个索引下,那么HeadPtr就用于指向链表的头节点, TailPtr用于指向链表的尾节点,//该优先级下的索引成员的地址则称为该优先级下双向链表的根节点, 知道根节点的地址就可以查找到该链表下的每一个节点。
2.1、就绪列表函数讲解

在实现就绪列表相关函数之前,我们需要在结构体os_tcb中添加Prio、NextPtr和PrevPtr这三个成员, 然后在os.h中定义两个全局变量OSPrioCur和OSPrioHighRdy
struct os_tcb {
CPU_STK *StkPtr;
CPU_STK_SIZE StkSize;
/* 任务延时周期个数 */
OS_TICK TaskDelayTicks;
/* 任务优先级 */
OS_PRIO Prio;
/* 就绪列表双向链表的下一个指针 */
OS_TCB *NextPtr;
/* 就绪列表双向链表的前一个指针 */
OS_TCB *PrevPtr;
};
/* 在os.h中定义 */
OS_EXT OS_PRIO OSPrioCur; /* 当前优先级 */
OS_EXT OS_PRIO OSPrioHighRdy; /* 最高优先级 */
-
OS_RdyListInit()
void OS_RdyListInit(void)//将就绪列表OSRdyList[]初始化为空
{
OS_PRIO i;
OS_RDY_LIST *p_rdy_list;
/* 循环初始化,所有成员都初始化为0 */
for ( i=0u; i<OS_CFG_PRIO_MAX; i++ ) {
p_rdy_list = &OSRdyList[i];
p_rdy_list->NbrEntries = (OS_OBJ_QTY)0;
p_rdy_list->HeadPtr = (OS_TCB *)0;
p_rdy_list->TailPtr = (OS_TCB *)0;
}
}
-
OS_RdyListInsertHead()
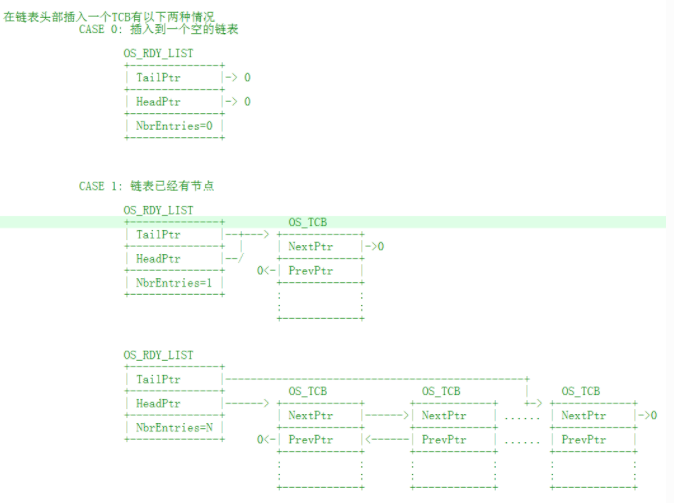
void OS_RdyListInsertHead (OS_TCB *p_tcb)
{
OS_RDY_LIST *p_rdy_list;
OS_TCB *p_tcb2;
/* 获取链表根部 */
p_rdy_list = &OSRdyList[p_tcb->Prio];
/* CASE 0: 链表是空链表 */
if (p_rdy_list->NbrEntries == (OS_OBJ_QTY)0) {
p_rdy_list->NbrEntries = (OS_OBJ_QTY)1;
p_tcb->NextPtr = (OS_TCB *)0;
p_tcb->PrevPtr = (OS_TCB *)0;
p_rdy_list->HeadPtr = p_tcb;
p_rdy_list->TailPtr = p_tcb;
}
/* CASE 1: 链表已有节点 */
else {
p_rdy_list->NbrEntries++;
p_tcb->NextPtr = p_rdy_list->HeadPtr;
p_tcb->PrevPtr = (OS_TCB *)0;
p_tcb2 = p_rdy_list->HeadPtr;
p_tcb2->PrevPtr = p_tcb;
p_rdy_list->HeadPtr = p_tcb;
}
}
-
OS_RdyListInsertTail()
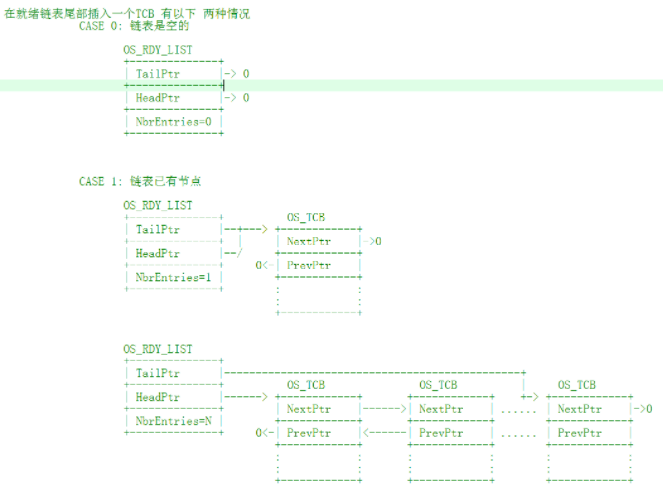
void OS_RdyListInsertTail (OS_TCB *p_tcb)
{
OS_RDY_LIST *p_rdy_list;
OS_TCB *p_tcb2;
/* 获取链表根部 */
p_rdy_list = &OSRdyList[p_tcb->Prio];
/* CASE 0: 链表是空链表 */
if (p_rdy_list->NbrEntries == (OS_OBJ_QTY)0) {
p_rdy_list->NbrEntries = (OS_OBJ_QTY)1;
p_tcb->NextPtr = (OS_TCB *)0;
p_tcb->PrevPtr = (OS_TCB *)0;
p_rdy_list->HeadPtr = p_tcb;
p_rdy_list->TailPtr = p_tcb;
}
/* CASE 1: 链表已有节点 */
else {
p_rdy_list->NbrEntries++;
p_tcb->NextPtr = (OS_TCB *)0;
p_tcb2 = p_rdy_list->TailPtr;
p_tcb->PrevPtr = p_tcb2;
p_tcb2->NextPtr = p_tcb;
p_rdy_list->TailPtr = p_tcb;
}
}
-
OS_RdyListInsert()
OS_RdyListInsert()用于将任务的TCB插入就绪列表,插入的时候分成两步,第一步是根据优先级将优先级表中的相应位置位, 这个调用OS_PrioInsert()函数来实现,第二步是根据优先级将任务的TCB放到OSRdyList[优先级]中, 如果优先级等于当前的优先级则插入链表的尾部,否则插入链表的头部
/* 在就绪链表中插入一个TCB */
void OS_RdyListInsert (OS_TCB *p_tcb)
{
/* 将优先级插入优先级表 */
OS_PrioInsert(p_tcb->Prio);
if (p_tcb->Prio == OSPrioCur)
{
/* 如果是当前优先级则插入链表尾部 */
OS_RdyListInsertTail(p_tcb);
}
else
{
/* 否则插入链表头部 */
OS_RdyListInsertHead(p_tcb);
}
}
-
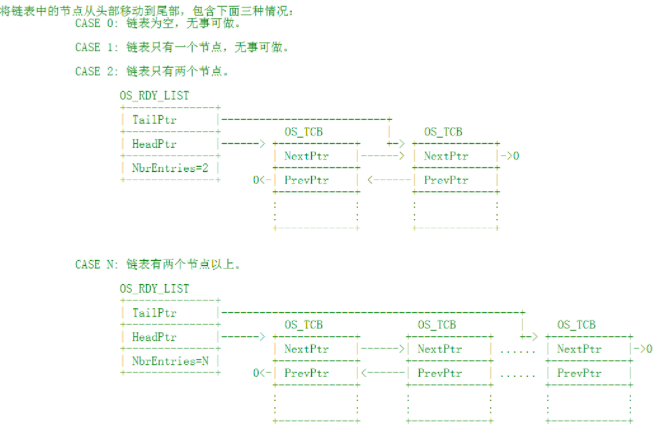
OS_RdyListMoveHeadToTail()
用于将节点从链表头部移动到尾部,移动的时候分四种情况,第一种是链表为空,无事可做; 第二种是链表只有一个节点,也是无事可做;第三种是链表只有两个节点;第四种是链表有两个以上节点
void OS_RdyListMoveHeadToTail (OS_RDY_LIST *p_rdy_list)
{
OS_TCB *p_tcb1;
OS_TCB *p_tcb2;
OS_TCB *p_tcb3;
switch (p_rdy_list->NbrEntries) {
case 0:
case 1:
break;
case 2:
p_tcb1 = p_rdy_list->HeadPtr;
p_tcb2 = p_rdy_list->TailPtr;
p_tcb1->PrevPtr = p_tcb2;
p_tcb1->NextPtr = (OS_TCB *)0;
p_tcb2->PrevPtr = (OS_TCB *)0;
p_tcb2->NextPtr = p_tcb1;
p_rdy_list->HeadPtr = p_tcb2;
p_rdy_list->TailPtr = p_tcb1;
break;
default:
p_tcb1 = p_rdy_list->HeadPtr;
p_tcb2 = p_rdy_list->TailPtr;
p_tcb3 = p_tcb1->NextPtr;
p_tcb3->PrevPtr = (OS_TCB *)0;
p_tcb1->NextPtr = (OS_TCB *)0;
p_tcb1->PrevPtr = p_tcb2;
p_tcb2->NextPtr = p_tcb1;
p_rdy_list->HeadPtr = p_tcb3;
p_rdy_list->TailPtr = p_tcb1;
break;
}
}
-
OS_RdyListRemove()
用于从链表中移除一个节点,移除的时候分为三种情况,第一种是链表为空,无事可做; 第二种是链表只有一个节点;第三种是链表有两个以上节点

void OS_RdyListRemove (OS_TCB *p_tcb)
{
OS_RDY_LIST *p_rdy_list;
OS_TCB *p_tcb1;
OS_TCB *p_tcb2;
p_rdy_list = &OSRdyList[p_tcb->Prio];
/* 保存要删除的TCB节点的前一个和后一个节点 */
p_tcb1 = p_tcb->PrevPtr;
p_tcb2 = p_tcb->NextPtr;
/* 要移除的TCB节点是链表中的第一个节点 */
if (p_tcb1 == (OS_TCB *)0)
{
/* 且该链表中只有一个节点 */
if (p_tcb2 == (OS_TCB *)0)
{
/* 根节点全部初始化为0 */
p_rdy_list->NbrEntries = (OS_OBJ_QTY)0;
p_rdy_list->HeadPtr = (OS_TCB *)0;
p_rdy_list->TailPtr = (OS_TCB *)0;
/* 清除在优先级表中相应的位 */
OS_PrioRemove(p_tcb->Prio);
}
/* 该链表中不止一个节点 */
else
{
/* 节点减1 */
p_rdy_list->NbrEntries--;
p_tcb2->PrevPtr = (OS_TCB *)0;
p_rdy_list->HeadPtr = p_tcb2;
}
}
/* 要移除的TCB节点不是链表中的第一个节点 */
else
{
p_rdy_list->NbrEntries--;
p_tcb1->NextPtr = p_tcb2;
/* 如果要删除的节点的下一个节点是0,即要删除的节点是最后一个节点 */
if (p_tcb2 == (OS_TCB *)0)
{
p_rdy_list->TailPtr = p_tcb1;
}
else
{
p_tcb2->PrevPtr = p_tcb1;
}
}
/* 复位从就绪列表中删除的TCB的PrevPtr和NextPtr这两个指针 */
p_tcb->PrevPtr = (OS_TCB *)0;
p_tcb->NextPtr = (OS_TCB *)0;
}
八、支持多优先级
在此之前,OS只支持两个任务互相切换,还没有到优先级,
现在开始往任务中加入优先级的功能。数字优先级越小,逻辑优先级越高。
1、定义优先级相关全局变量
/* 当前优先级 */
OS_EXT OS_PRIO OSPrioCur;
/* 最高优先级 */
OS_EXT OS_PRIO OSPrioHighRdy;
2、修改OSInit()函数
void OSInit (OS_ERR *p_err)
{
/* 配置OS初始状态为停止态 */
OSRunning = OS_STATE_OS_STOPPED;
/* 初始化两个全局TCB,这两个TCB用于任务切换 */
OSTCBCurPtr = (OS_TCB *)0;
OSTCBHighRdyPtr = (OS_TCB *)0;
/* 初始化优先级变量 */
OSPrioCur = (OS_PRIO)0; //将1中新添加的优先级相关的全部变量,在OSInit()函数中进行初始化
OSPrioHighRdy = (OS_PRIO)0;
/* 初始化优先级表 */
OS_PrioInit();
/* 初始化就绪列表 */
OS_RdyListInit();
/* 初始化空闲任务 */
OS_IdleTaskInit(p_err);
if (*p_err != OS_ERR_NONE) {
return;
}
}
3、修改任务控制块TCB
struct os_tcb {
CPU_STK *StkPtr;
CPU_STK_SIZE StkSize;
/* 任务延时周期个数 */
OS_TICK TaskDelayTicks;
/* 任务优先级 */
OS_PRIO Prio; //在任务控制块中,加入优先级字段Prio。数据类型为OS_PRIO, 宏展开后是8位的整型,所以只支持255个优先级。
/* 就绪列表双向链表的下一个指针 */
OS_TCB *NextPtr;
/* 就绪列表双向链表的前一个指针 */
OS_TCB *PrevPtr;
};
4、修改OSTaskCreate()函数
void OSTaskCreate (OS_TCB *p_tcb,
OS_TASK_PTR p_task,
void *p_arg,
OS_PRIO prio,//加入优先级字段。
CPU_STK *p_stk_base,
CPU_STK_SIZE stk_size,
OS_ERR *p_err)
{
CPU_STK *p_sp;
CPU_SR_ALLOC();//定义一个局部变量,用来存CPU关中断前的中断状态,因为接下来将任务添加到就绪列表这段代码属于临界短代码,需要关中断。
/* 初始化TCB为默认值 */
OS_TaskInitTCB(p_tcb);
/* 初始化栈 */
p_sp = OSTaskStkInit( p_task,
p_arg,
p_stk_base,
stk_size );
p_tcb->Prio = prio;//将形参传进来的优先级存到任务控制块TCB的优先级字段。
p_tcb->StkPtr = p_sp;
p_tcb->StkSize = stk_size;
/* 进入临界段 */
OS_CRITICAL_ENTER();
/* 将任务添加到就绪列表,需要分成两步来实现:1、根据优先级置位优先级表中的相应位置; 2、将任务TCB放到OSRdyList[优先级]中,如果同一个优先级有多个任务,那么这些任务的TCB就会被放到OSRdyList[优先级]串成一个双向链表。*/
OS_PrioInsert(p_tcb->Prio);
OS_RdyListInsertTail(p_tcb);
/* 退出临界段 */
OS_CRITICAL_EXIT();(7)
*p_err = OS_ERR_NONE;
}
5、修改OS_IdleTaskInit()函数
修改OS_IdleTaskInit()函数,是因为该函数调用了任务创建函数OSTaskCreate(),OSTaskCreate()我们刚刚加入了优先级, 所以这里我们要跟空闲任务分配一个优先级
/* 空闲任务初始化 */
void OS_IdleTaskInit(OS_ERR *p_err)
{
/* 初始化空闲任务计数器 */
OSIdleTaskCtr = (OS_IDLE_CTR)0;
/* 创建空闲任务 */
OSTaskCreate( (OS_TCB *)&OSIdleTaskTCB,
(OS_TASK_PTR )OS_IdleTask,
(void *)0,
(OS_PRIO)(OS_CFG_PRIO_MAX - 1u),//设置空闲任务的优先级最低
(CPU_STK *)OSCfg_IdleTaskStkBasePtr,
(CPU_STK_SIZE)OSCfg_IdleTaskStkSize,
(OS_ERR *)p_err );
}
6、修改OSStart()函数
加入优先级之后,OSStart()函数需要修改,具体哪一个任务最先运行,由优先级决定
/* 启动RTOS,将不再返回 */
void OSStart (OS_ERR *p_err)
{
if ( OSRunning == OS_STATE_OS_STOPPED ) {
#if 0
/* 手动配置任务1先运行 */
OSTCBHighRdyPtr = OSRdyList[0].HeadPtr;
#endif
/* 寻找最高的优先级 */
OSPrioHighRdy = OS_PrioGetHighest();//(1)
OSPrioCur = OSPrioHighRdy;
/* 找到最高优先级的TCB */
OSTCBHighRdyPtr = OSRdyList[OSPrioHighRdy].HeadPtr;//(2)
OSTCBCurPtr = OSTCBHighRdyPtr;
/* 标记OS开始运行 */
OSRunning = OS_STATE_OS_RUNNING;
/* 启动任务切换,不会返回 */
OSStartHighRdy();
/* 不会运行到这里,运行到这里表示发生了致命的错误 */
*p_err = OS_ERR_FATAL_RETURN;
} else {
*p_err = OS_STATE_OS_RUNNING;
}
}
7、修改PendSV_Handler()函数
PendSV_Handler()函数中添加了优先级相关的代码
;*******************************************************************
; PendSVHandler异常
;*******************************************************************
OS_CPU_PendSVHandler_nosave
; OSPrioCur = OSPrioHighRdy
LDR R0, =OSPrioCur
LDR R1, =OSPrioHighRdy
LDRB R2, [R1]
STRB R2, [R0]
; OSTCBCurPtr = OSTCBHighRdyPtr
LDR R0, = OSTCBCurPtr
LDR R1, = OSTCBHighRdyPtr
LDR R2, [R1]
STR R2, [R0]
LDR R0, [R2]
LDMIA R0!, {R4-R11}
MSR PSP, R0
ORR LR, LR, #0x04
CPSIE I
BX LR
NOP
ENDP
8、修改OSTimeDly()函数
任务调用OSTimeDly()函数之后,任务就处于阻塞态,需要将任务从就绪列表中移除
/* 阻塞延时 */
void OSTimeDly(OS_TICK dly)
{
#if 0
/* 设置延时时间 */
OSTCBCurPtr->TaskDelayTicks = dly;
/* 进行任务调度 */
OSSched();
#endif
CPU_SR_ALLOC();//(1)定义一个局部变量,用来存CPU关中断前的中断状态,因为接下来将任务从就绪列表移除这段代码属于临界短代码,需要关中断。
/* 进入临界区 */
OS_CRITICAL_ENTER();//(2)
/* 设置延时时间 */
OSTCBCurPtr->TaskDelayTicks = dly;
/* 从就绪列表中移除 */
//OS_RdyListRemove(OSTCBCurPtr);
OS_PrioRemove(OSTCBCurPtr->Prio);//(3)
/* 退出临界区 */
OS_CRITICAL_EXIT();//(4)
/* 任务调度 */
OSSched();
}
//将任务从就绪列表移除, 这里只需将任务在优先级表中对应的位清除即可,暂时不需要把任务TCB从OSRdyList[]中移除, 因为接下来OSTimeTick()函数还是通过扫描OSRdyList[]来判断任务的延时时间是否到期。当我们加入了时基列表之后, 当任务调用OSTimeDly()函数进行延时,就可以把任务的TCB从就绪列表删除,然后把任务TCB插入时基列表, OSTimeTick()函数判断任务的延时是否到期只需通过扫描时基列表即可,时基列表在下一个代码实例中实现。
9、修改OSSched()函数
任务调度函数OSSched()不再是之前的两个任务轮流切换,需要根据优先级来调度
void OSSched(void)
{
CPU_SR_ALLOC();//(1)
/* 进入临界区 */
OS_CRITICAL_ENTER();//(2)
/* 查找最高优先级的任务 */
OSPrioHighRdy = OS_PrioGetHighest();
OSTCBHighRdyPtr = OSRdyList[OSPrioHighRdy].HeadPtr;
/* 如果最高优先级的任务是当前任务则直接返回,不进行任务切换 */
if (OSTCBHighRdyPtr == OSTCBCurPtr)
{
/* 退出临界区 */
OS_CRITICAL_EXIT();
return;
}
/* 退出临界区 */
OS_CRITICAL_EXIT();//(5)
/* 任务切换 */
OS_TASK_SW();//(6)
}
10、修改OSTimeTick()函数
OSTimeTick()函数在SysTick中断服务函数中被调用,是一个周期函数,具体用于扫描就绪列表OSRdyList[], 判断任务的延时时间是否到期,如果到期则将任务在优先级表中对应的位置位
void OSTimeTick (void)
{
unsigned int i;
CPU_SR_ALLOC();//(1)
/* 进入临界区 */
OS_CRITICAL_ENTER();//(2)
/* 扫描就绪列表中所有任务的TaskDelayTicks,如果不为0,则减1 */
#if 0
for (i=0; i<OS_CFG_PRIO_MAX; i++)
{
if (OSRdyList[i].HeadPtr->TaskDelayTicks > 0)
{
OSRdyList[i].HeadPtr->TaskDelayTicks --;
}
}
#endif
for (i=0; i<OS_CFG_PRIO_MAX; i++) //(3)
{
if (OSRdyList[i].HeadPtr->TaskDelayTicks > 0)
{
OSRdyList[i].HeadPtr->TaskDelayTicks --;
if (OSRdyList[i].HeadPtr->TaskDelayTicks == 0)
{
/* 为0则表示延时时间到,让任务就绪 */
//OS_RdyListInsert (OSRdyList[i].HeadPtr);
OS_PrioInsert(i);
}
}
}
/* 退出临界区 */
OS_CRITICAL_EXIT();//(4)
/* 任务调度 */
OSSched();
}
11、main()函数
int main(void)
{
OS_ERR err;
/* CPU初始化:1、初始化时间戳 */
CPU_Init();
/* 关闭中断 */
CPU_IntDis();
/* 配置SysTick 10ms 中断一次 */
OS_CPU_SysTickInit (10);
/* 初始化相关的全局变量 */
OSInit(&err);//(1)
/* 创建任务 */
OSTaskCreate( (OS_TCB*)&Task1TCB,
(OS_TASK_PTR )Task1,
(void *)0,
(OS_PRIO)1,//(2)
(CPU_STK*)&Task1Stk[0],
(CPU_STK_SIZE) TASK1_STK_SIZE,
(OS_ERR *)&err );
OSTaskCreate( (OS_TCB*)&Task2TCB,
(OS_TASK_PTR )Task2,
(void *)0,
(OS_PRIO)2,//(3)
(CPU_STK*)&Task2Stk[0],
(CPU_STK_SIZE) TASK2_STK_SIZE,
(OS_ERR *)&err );
OSTaskCreate( (OS_TCB*)&Task3TCB,
(OS_TASK_PTR )Task3,
(void *)0,
(OS_PRIO)3,//(4)
(CPU_STK*)&Task3Stk[0],
(CPU_STK_SIZE) TASK3_STK_SIZE,
(OS_ERR *)&err );
#if 0
/* 将任务加入到就绪列表 将任务插入就绪列表这部分功能由OSTaskCreate()实现,这里通过条件编译屏蔽掉。*/
OSRdyList[0].HeadPtr = &Task1TCB;
OSRdyList[1].HeadPtr = &Task2TCB;
#endif
/* 启动OS,将不再返回 */
OSStart(&err);
}
/*
*******************************************************************
* 函数实现
*******************************************************************
*/
/* 软件延时 */
void delay (uint32_t count)
{
for (; count!=0; count--);
}
void Task1( void *p_arg )
{
for ( ;; ) {
flag1 = 1;
OSTimeDly(2);
flag1 = 0;
OSTimeDly(2);
}
}
void Task2( void *p_arg )
{
for ( ;; ) {
flag2 = 1;
OSTimeDly(2);
flag2 = 0;
OSTimeDly(2);
}
}
void Task3( void *p_arg )
{
for ( ;; ) {
flag3 = 1;
OSTimeDly(2);
flag3 = 0;
OSTimeDly(2);
}
}

