15*:图的应用(拓扑排序和关键路径问题)(1:拓扑排序 2:关键路径 )
问题
目录
1:拓扑排序
2:关键路径
预备
正文
1:拓扑排序介绍
我们会把施工过程、生产流程、软件开发、教学安排等都当成一个项目工程来对待,所有的工程都可分为若干个“活动”的子工程。例如下图一张简陋的电影制作流程图,现实中可能并不完全相同,但基本表达了一个工程和若干个活动的概念。在这些活动之间,通常会受到一定的条件约束,如其中某些活动必须在另一些活动完成之后才能开始。就像电影制作不可能在人员到位进驻场地时,导演还没有找到,也不可能在拍摄过程中,场地都没有。这都会导致荒谬的结果。因此这样的工程图,一定是无环的有向图。
在一个表示工程的有向图中,用顶点表示活动,用弧表示活动之间的优先关系,这样的有向图为顶点表示活动的网,我们称为AOV网(ActivityOn Vertex Network)。AOV网中的弧表示活动之间存在的某种制约关系。比如演职人员确定了,场地也联系好了,才可以开始进场拍摄。另外就是AOV网中不能存在回路。刚才已经举了例子,让某个活动的开始要以自己完成作为先决条件,显然是不可以的。
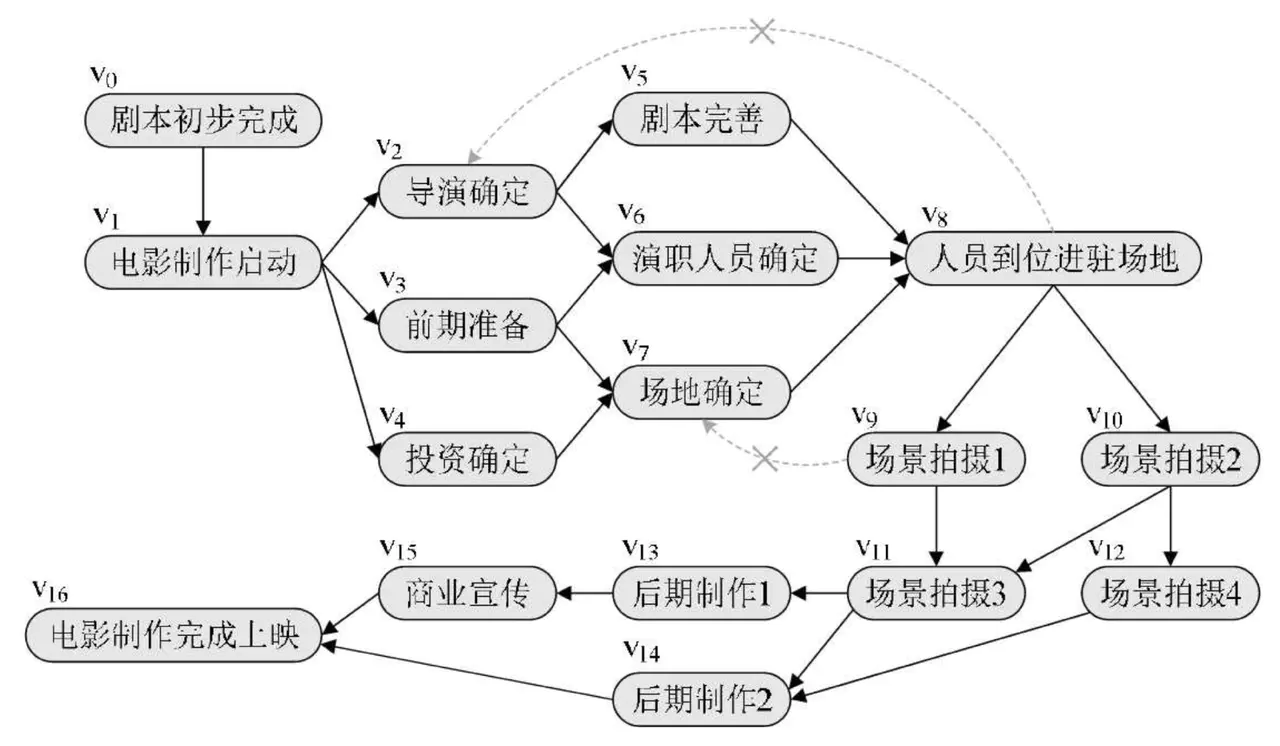
设G=(V,E)是一个具有n个顶点的有向图,V中的顶点序列v1,v2,……,vn,满足若从顶点vi到vj有一条路径,则在顶点序列中顶点vi必在顶点vj之前。则我们称这样的顶点序列为一个拓扑序列。
上图这样的AOV网的拓扑序列不止一条。序列v0 v1 v2 v3 v4 v5 v6 v7 v8 v9 v10 v11 v12 v13 v14 v15 v16 是一条拓扑序列,而v0 v1 v4 v3 v2 v7 v6 v5 v8 v10 v9 v12 v11 v14 v13 v15 v16也是一条拓扑序列。
所谓拓扑排序,其实就是对一个有向图构造拓扑序列的过程。构造时会有两个结果,如果此网的全部顶点都被输出,则说明它是不存在环(回路)的AOV网;如果输出顶点数少了,哪怕是少了一个,也说明这个网存在环(回路),不是AOV网。

4:代码实现逻辑
算法基本思路:
从AOV⽹网中选择⼀个入度为0的顶点输出,然后从删去此顶点,并删除以 此顶点为尾的弧. 继续重复此步骤,直到输出全部顶点或AOV⽹网中不不存在入度为0的顶点 为⽌.
代码算法分析:
在这个算法实现过程,我们需要借助一个数据结构栈.来帮助我们解决避免每次查找时, 都要去遍历AOV图中的顶点表查找有没有入度为0的顶点.
- 创建一个栈(stack),⽤用来存储⼊度in为0 的顶点序号;
- 遍历AOV图中顶点表,判断⼊入度为0的顶点全部入栈;
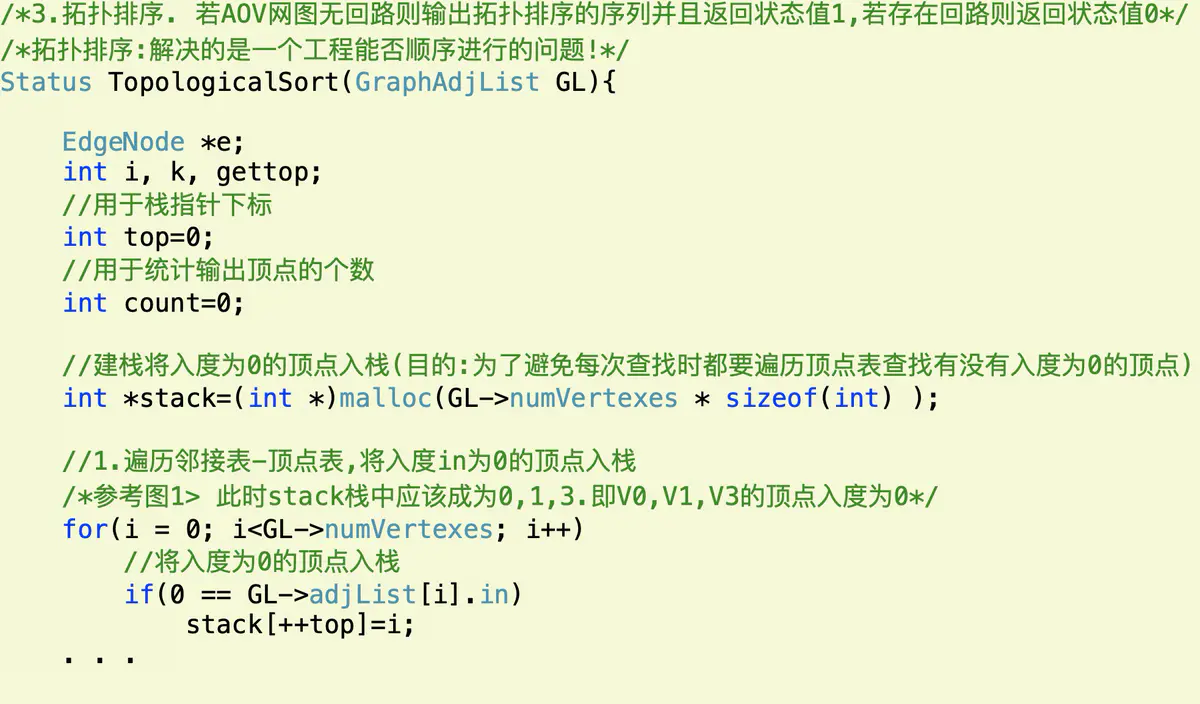
#include "stdio.h" #include "stdlib.h" #include "math.h" #include "time.h" #define OK 1 #define ERROR 0 #define TRUE 1 #define FALSE 0 #define MAXEDGE 20 #define MAXVEX 14 #define INFINITYC 65535 /* Status是函数的类型,其值是函数结果状态代码,如OK等 */ typedef int Status; /*邻接矩阵结构 */ typedef struct { int vexs[MAXVEX]; int arc[MAXVEX][MAXVEX]; int numVertexes, numEdges; }MGraph; /* 邻接表结构****************** */ //边表结点 typedef struct EdgeNode { //邻接点域,存储该顶点对应的下标 int adjvex; //用于存储权值,对于非网图可以不需要 int weight; //链域,指向下一个邻接点 struct EdgeNode *next; }EdgeNode; //顶点表结点 typedef struct VertexNode { //顶点入度 int in; //顶点域,存储顶点信息 int data; //边表头指针 EdgeNode *firstedge; }VertexNode, AdjList[MAXVEX]; //图结构 typedef struct { AdjList adjList; //图中当前顶点数和边数 int numVertexes,numEdges; }graphAdjList,*GraphAdjList; /*1.构成AOV网图*/ void CreateMGraph(MGraph *G)/* 构件图 */ { int i, j; /* printf("请输入边数和顶点数:"); */ G->numEdges=MAXEDGE; G->numVertexes=MAXVEX; /* 初始化图 */ for (i = 0; i < G->numVertexes; i++) { G->vexs[i]=i; } /* 初始化图 */ for (i = 0; i < G->numVertexes; i++) { for ( j = 0; j < G->numVertexes; j++) { G->arc[i][j]=0; } } G->arc[0][4]=1; G->arc[0][5]=1; G->arc[0][11]=1; G->arc[1][2]=1; G->arc[1][4]=1; G->arc[1][8]=1; G->arc[2][5]=1; G->arc[2][6]=1; G->arc[2][9]=1; G->arc[3][2]=1; G->arc[3][13]=1; G->arc[4][7]=1; G->arc[5][8]=1; G->arc[5][12]=1; G->arc[6][5]=1; G->arc[8][7]=1; G->arc[9][10]=1; G->arc[9][11]=1; G->arc[10][13]=1; G->arc[12][9]=1; } /*2.将AOV网图借助邻近矩阵转换成邻接表结构*/ void CreateALGraph(MGraph G,GraphAdjList *GL) { int i,j; EdgeNode *e; //创建图 *GL = (GraphAdjList)malloc(sizeof(graphAdjList)); //对图中的顶点数.弧数赋值 (*GL)->numVertexes=G.numVertexes; (*GL)->numEdges=G.numEdges; //读入顶点信息,建立顶点表 for(i= 0;i <G.numVertexes;i++) { (*GL)->adjList[i].in=0; (*GL)->adjList[i].data=G.vexs[i]; //将边表置为空表 (*GL)->adjList[i].firstedge=NULL; } //建立边表 for(i=0;i<G.numVertexes;i++) { for(j=0;j<G.numVertexes;j++) { if (G.arc[i][j]==1) { //创建空的边表结点 e=(EdgeNode *)malloc(sizeof(EdgeNode)); //邻接序号为j e->adjvex=j; // 将当前顶点上的指向的结点指针赋值给e e->next=(*GL)->adjList[i].firstedge; //将当前顶点的指针指向e (*GL)->adjList[i].firstedge=e; (*GL)->adjList[j].in++; } } } } /*3.拓扑排序. 若AOV网图无回路则输出拓扑排序的序列并且返回状态值1,若存在回路则返回状态值0*/ /*拓扑排序:解决的是一个工程能否顺序进行的问题!*/ Status TopologicalSort(GraphAdjList GL){ EdgeNode *e; int i,k,gettop; //用于栈指针下标 int top=0; //用于统计输出顶点的个数 int count=0; //建栈将入度为0的顶点入栈(目的:为了避免每次查找时都要遍历顶点表查找有没有入度为0的顶点) int *stack=(int *)malloc(GL->numVertexes * sizeof(int) ); //1.遍历邻接表-顶点表,将入度in为0的顶点入栈 /*参考图1> 此时stack栈中应该成为0,1,3.即V0,V1,V3的顶点入度为0*/ for(i = 0; i<GL->numVertexes; i++) //将入度为0的顶点入栈 if(0 == GL->adjList[i].in) stack[++top]=i; printf("top = %d\n",top); //2.循环栈结构(当栈中有元素则循环继续) while(top!=0) { //出栈 gettop=stack[top--]; printf("%d -> ",GL->adjList[gettop].data); //输出顶点,并计数 count++; //遍历与栈顶相连接的弧 for(e = GL->adjList[gettop].firstedge; e; e = e->next) { //获取与gettop连接的顶点 k=e->adjvex; //1.将与gettop连接的顶点入度减1; //2.判断如果当前减1后为0,则入栈 if( !(--GL->adjList[k].in) ) //将k入栈到stack中,并且top加1; stack[++top]=k; } } /*思考:3 -> 1 -> 2 -> 6 -> 0 -> 4 -> 5 -> 8 -> 7 -> 12 -> 9 -> 10 ->13 -> 11 这并不是唯一的拓扑排序结果. 分析算法:将入度为0的顶点入栈的时间复杂度为O(n), 而之后的while 循环,每个顶点进一次栈,并且出一次栈. 入度减1, 则共执行了e次. 那么整个算法的时间复杂度为O(n+e)*/ printf("\n"); //判断是否把所有的顶点都输出. 则表示找到了拓扑排序; if(count < GL->numVertexes) return ERROR; else return OK; } int main(int argc, const char * argv[]) { // insert code here... printf("Hello, 拓扑排序!\n"); MGraph G; GraphAdjList GL; int result; CreateMGraph(&G); CreateALGraph(G,&GL); result=TopologicalSort(GL); printf("result:%d",result); return 0; }
代码分析
1.程序开始运行,第3~7行都是变量的定义,其中stack是一个栈,用来存储整型的数字。
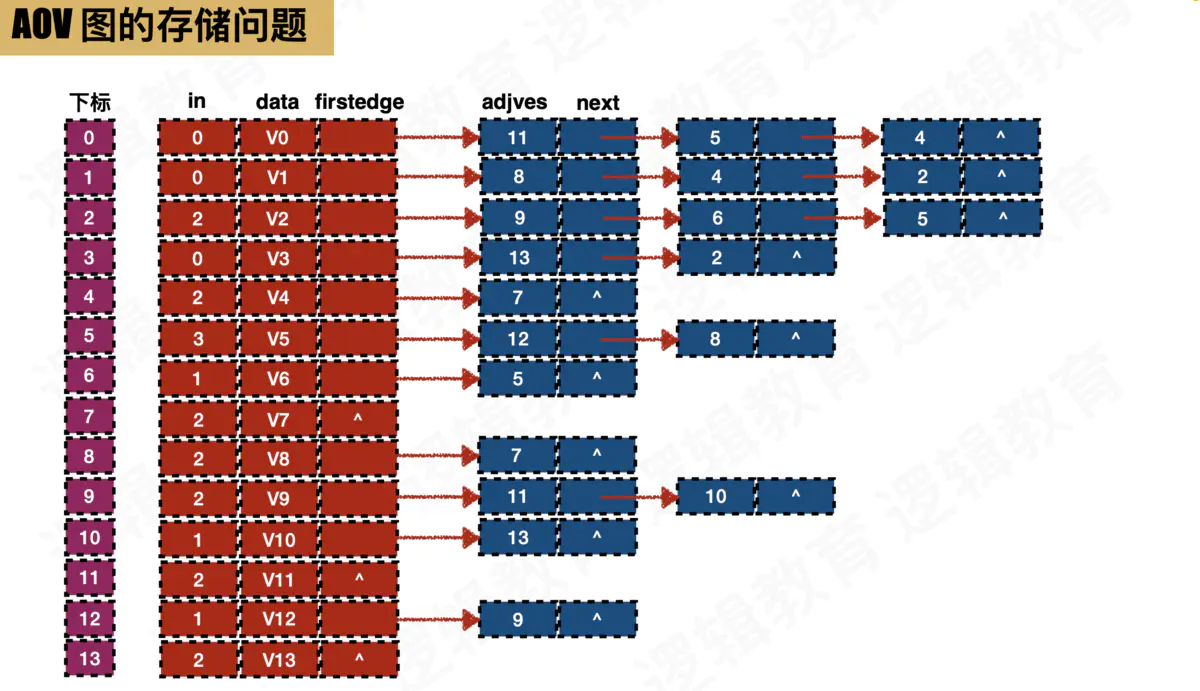
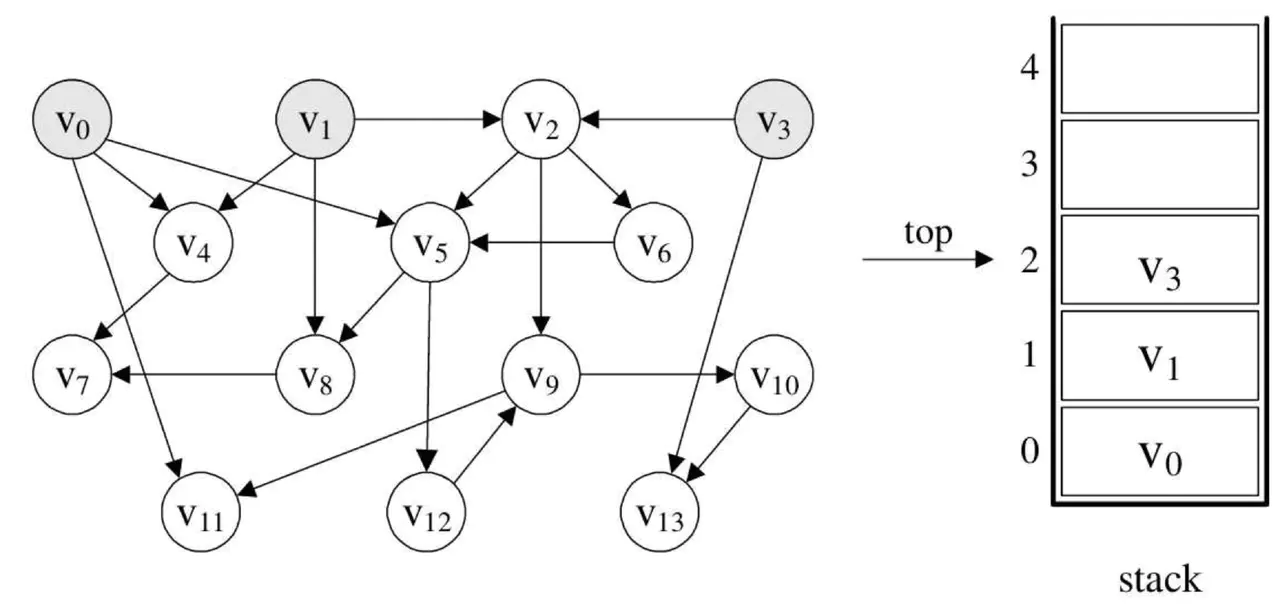
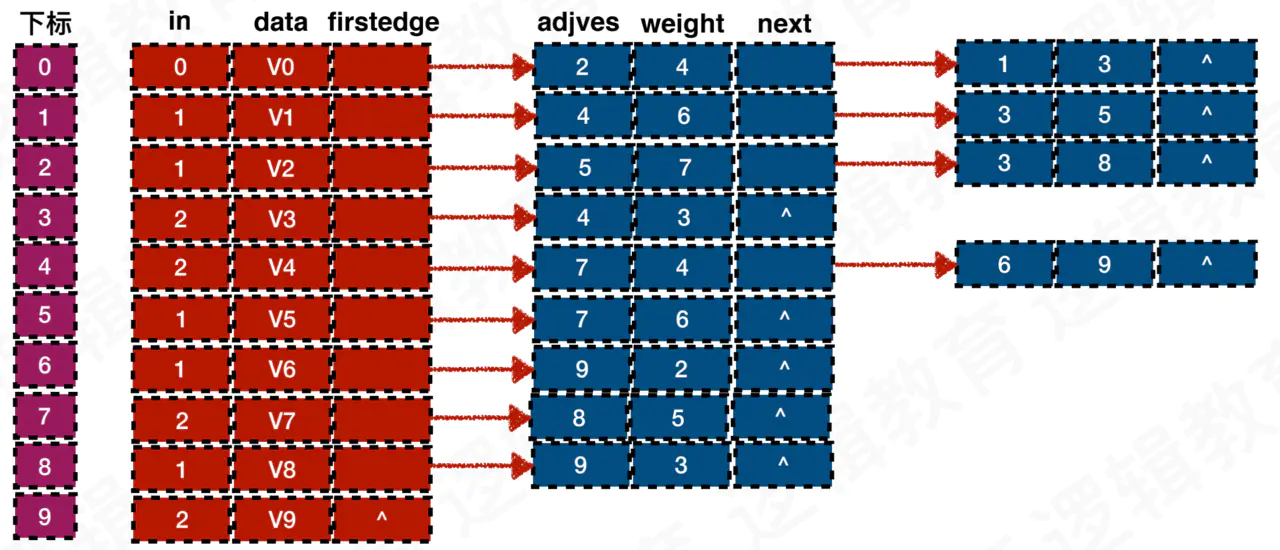
2.第8~10行,作了一个循环判断,把入度为0的顶点下标都入栈,从下图的右图邻接表可知,此时stack应该为:{0,1,3},即v0、v1、v3的顶点入度为0,如下图所示。
3.第12~23行,while循环,当栈中有数据元素时,始终循环。
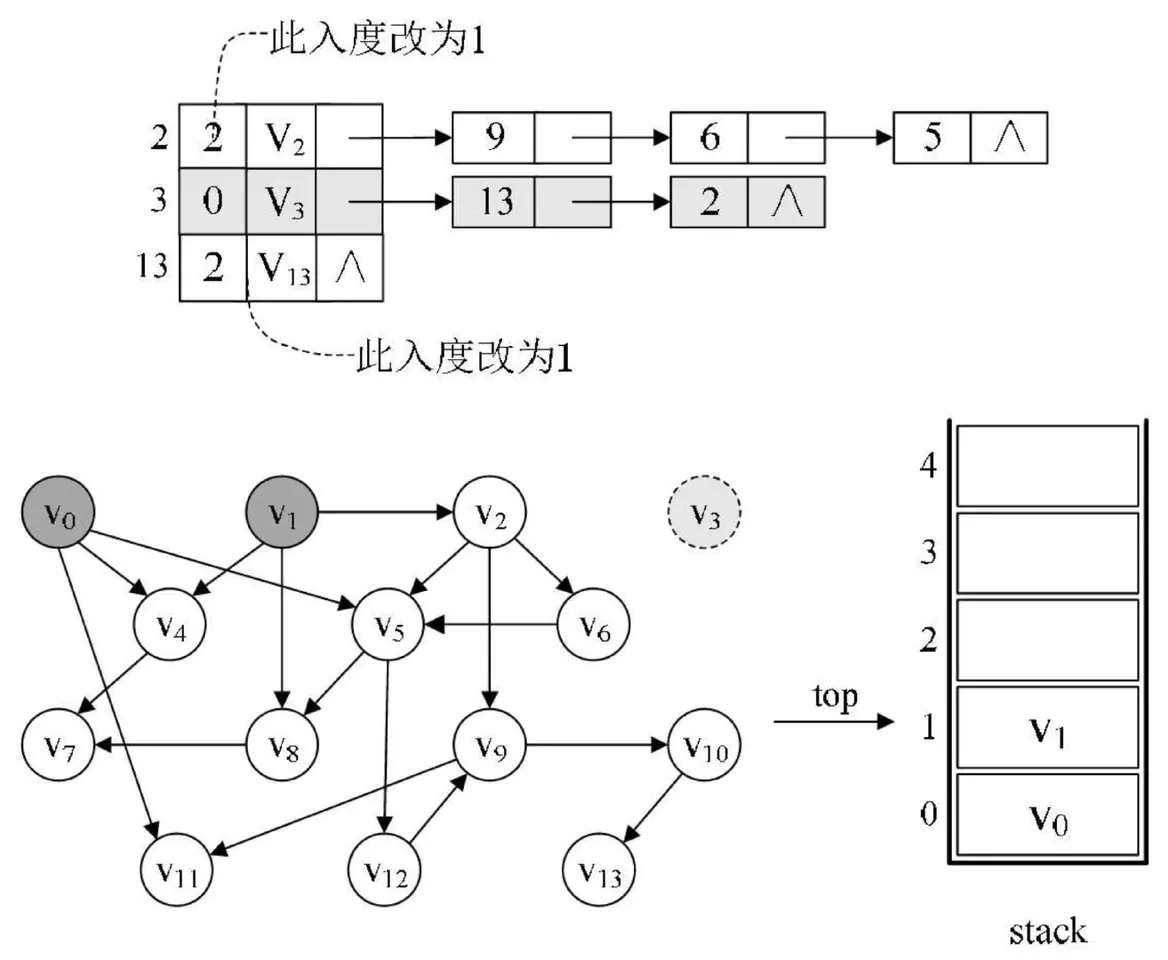
4.第14~16行,v3出栈得到gettop=3。并打印此顶点,然后count加1。
5.第17~22行,循环其实是对v3顶点对应的弧链表进行遍历,即下图中的灰色部分,找到v3连接的两个顶点v2和v13,并将它们的入度减少一位,此时v2和v13的in值都为1。它的目的是为了将v3顶点上的弧删除。
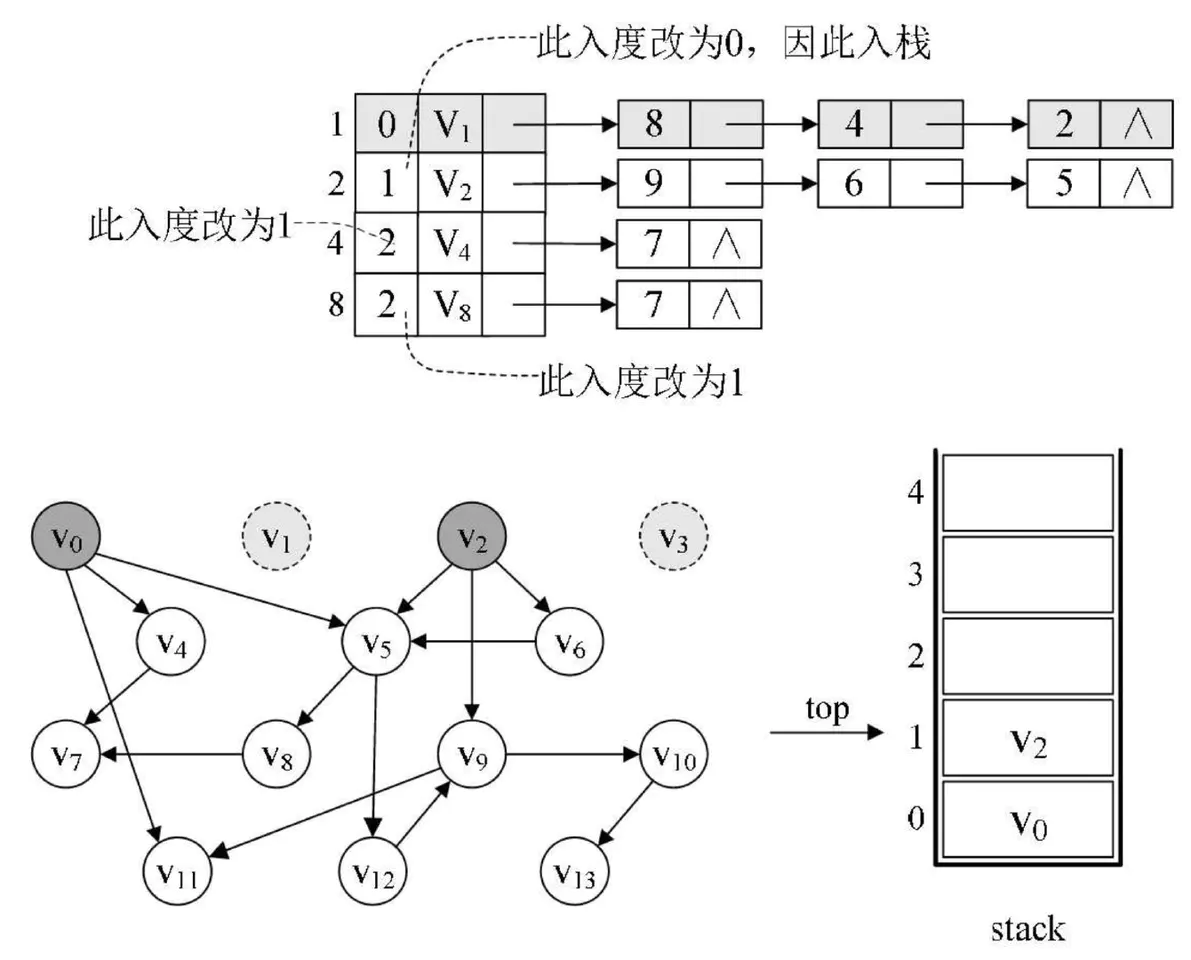
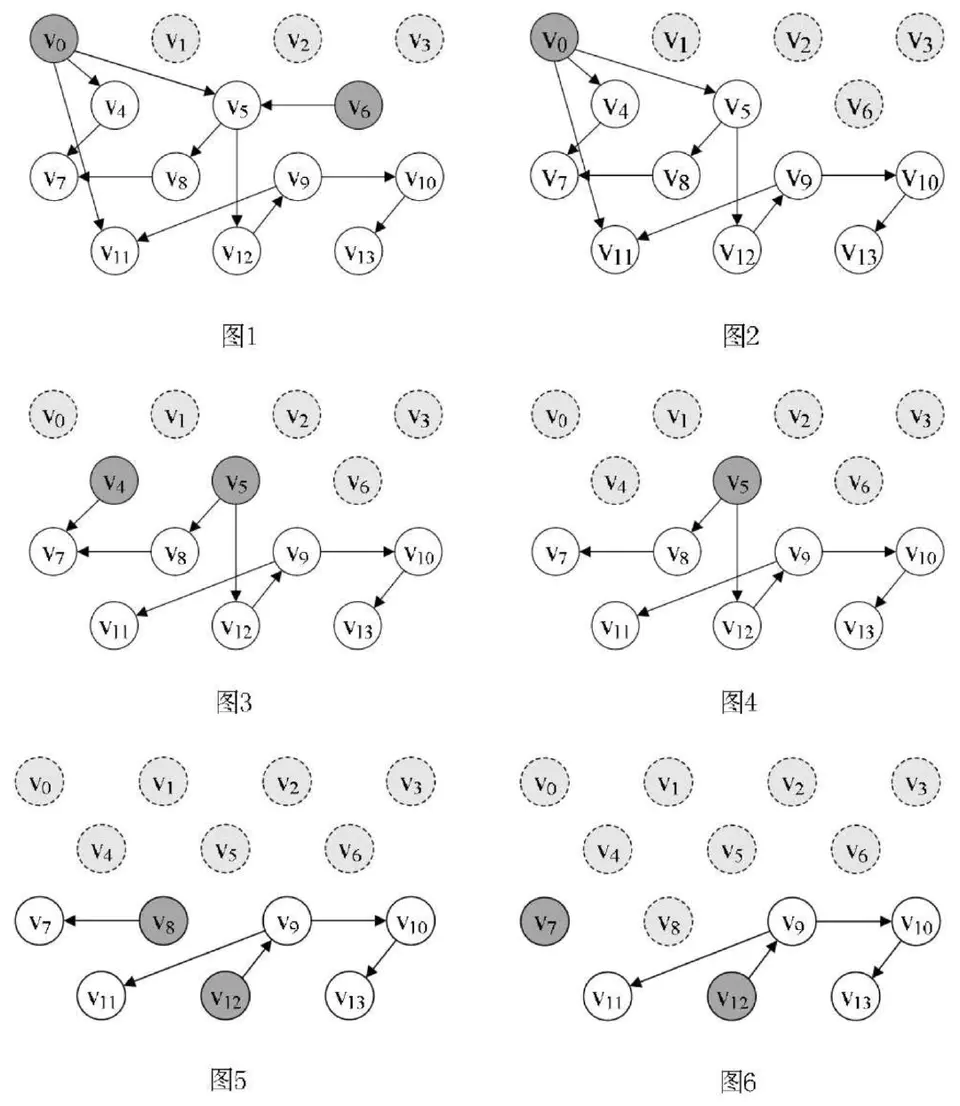
8.最终拓扑排序打印结果为3->1->2->6->0->4->5->8->7->12->9->10->13->11。当然这结果并不是唯一的一种拓扑排序方案。
分析整个算法,对一个具有n个顶点e条弧的AOV网来说,第8~10行扫描顶点表,将入度为0的顶点入栈的时间复杂为O(n),而之后的while循环中,每个顶点进一次栈,出一次栈,入度减1的操作共执行了e次,所以整个算法的时间复杂度为O(n+e)。
2:关键路径:
1:关键路径是指设计中从输入到输出经过的延时最长的逻辑路径。
优化关键路径是一种提高设计工作速度的有效方法。一般地,从输入到输出的延时取决于信号所经过的延时最大路径,而与其他延时小的路径无关。在优化设计过程中关键路径法可以反复使用,直到不可能减少关键路径延时为止。EDA工具中综合器及设计分析器通常都提供关键路径的信息以便设计者改进设计,提高速度。
思考:
例如,造⼀辆汽⻋车.我们需要先造各种各样的
零件,部件. 最终才能完成汽⻋车的组装.
如右图,这些零部件基本都是在流⽔水线同时 生产的.假如造⼀个轮⼦子,需要0.5天的时间, 造⼀个发动机需要3天时间. 造⼀个车底盘 需要2天时间,其他零部件需要3天时间,全部 零部件集中到一处需要0.5天.组装成汽⻋车需 要2天时间.请问一个汽车厂造一台汽⻋车,最 短需要多长时间?
没有⼊边的顶点称为始点或源点;
没有出边的顶点称为终点或汇点;
由于⼀个⼯程, 总有⼀个开始,⼀个结束.所以正常情况下,AOE⽹只有⼀个源点和⼀个汇点.
路径上各个活动所持续的时间之和称为路径⻓度
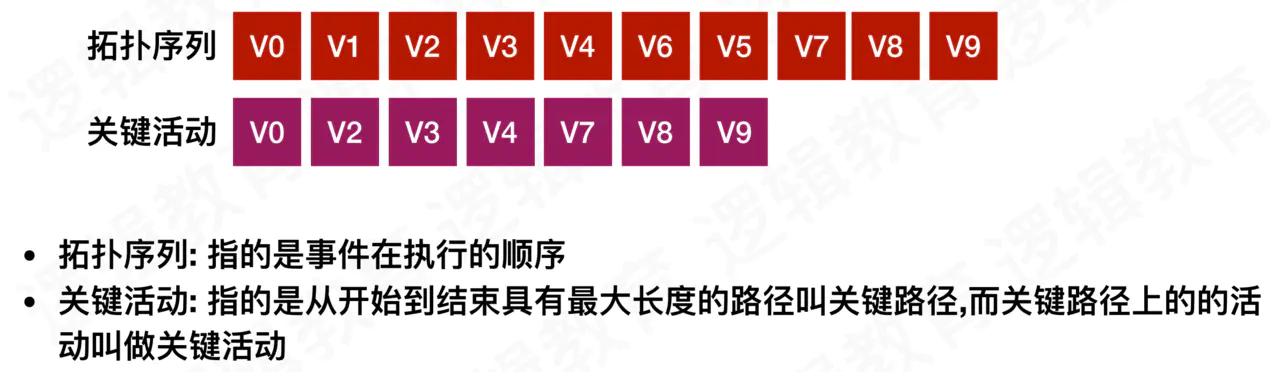
从源点到汇点具有最⼤的路径叫关键路径
在关键路径上的活动叫关键活动
关键路径求解过程⼏个核⼼参数
• 事件最早发⽣的时间 etv (earliest time of vertex): 即顶点Vk 的最早发⽣时间;
• 事件最晚发⽣时间 ltv (latest time of vertex): 即顶点Vk 的最晚发⽣时间,
也就是每个顶点对应的事件最晚需要开始的时间,超出此时间将会延误整个⼯期;
• 活动的最早开⼯时间 ete (earliest time of edge); 即弧Ak 的最早发⽣时间;
• 活动的最晚开⼯时间 lte (latest time of edge); 即弧Ak的最晚发⽣时间,也就是不推迟⼯期的最晚开⼯时间。
思路:
求事件的最早发⽣时间etv的过程:就是从头到尾去找拓扑序列的过程. 所以在求解关键路径之前,我们需要调⽤⼀次拓扑排序的序列去计算etv 和拓扑序列列表.
事件最晚发⽣时间 ltv (latest time of vertex): 即顶点Vk的最晚发⽣时间,也就是每个顶点对应的事件最晚需要开始的时间,超出此时间将会延误整个工期。
活动的最早开⼯时间 ete (earliest time of edge);:即弧Ak的最早发⽣时间;
活动的最晚开⼯时间 lte (latest time of edge):即弧Ak的最晚发⽣时间,也就是不推迟⼯期的最晚开工时间。
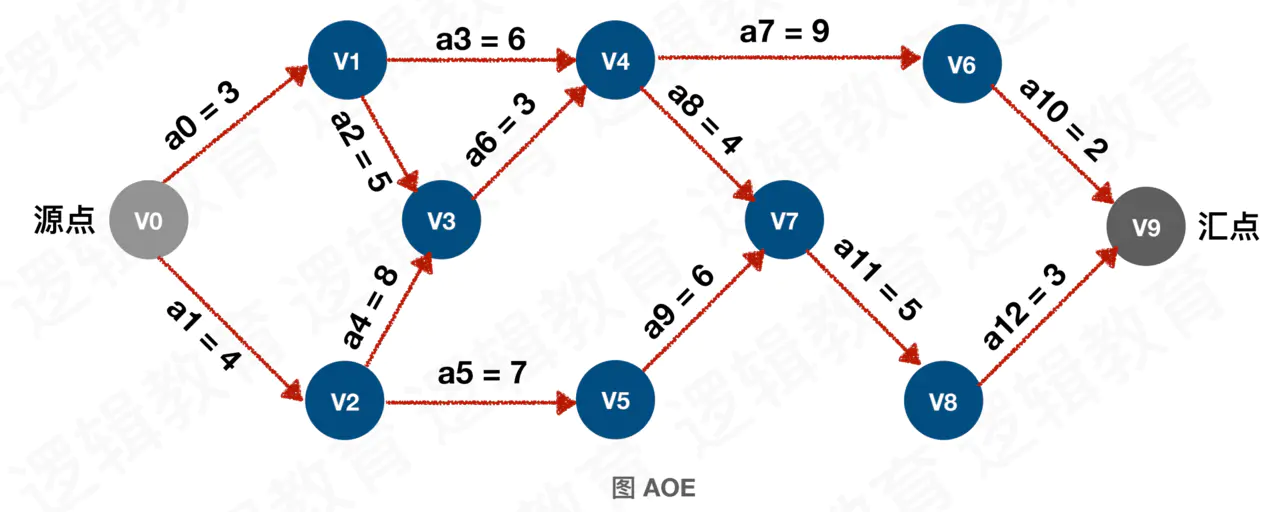
AOE网示例图:
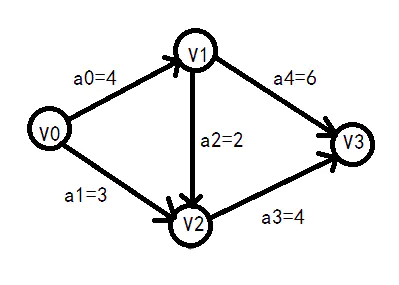
源点:在AOE网中,没有入边的顶点称为源点;如顶点V0
终点:在AOE网中,没有出边的顶点称为终点;如顶点V3
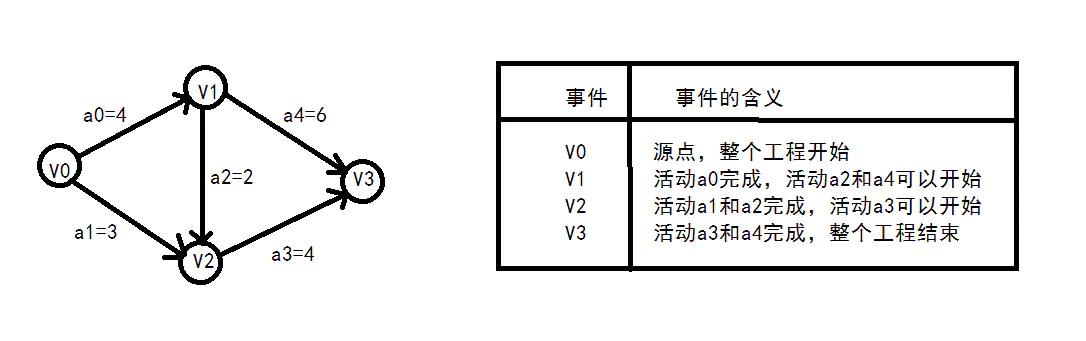
【1】只有在进入某顶点的活动都已经结束,该顶点所代表的事件才发生;
例如:a1和a2活动都结束了,顶点V2所代表的事件才会发生。
【2】只有在某顶点所代表的事件发生后,从该顶点出发的各活动才开始;
例如:只有顶点V1所代表的事件结束之后,活动a2和a4才会开始。
根据AOE网的性质,只有进入Vk的所有活动<Vj, Vk>都结束,Vk代表的事件才能发生,而活动<Vj, Vk>的最早结束时间为ve[j]+len<Vj, Vk>。所以,计算Vk的最早发生时间的方法为:
ve[0] = 0
ve[k] = max(ve[j] + len<Vj, Vk>)
vl[k]是指在不推迟整个工期的前提下,事件Vk允许的最迟发生时间。根据AOE网的性质,只有顶点Vk代表的事件发生,从Vk出发的活动<Vk, Vj>才能开始,而活动<Vk, Vj>的最晚开始时间为vl[j] - len<Vk, Vj>。
活动的最早发生时间:ee[i]
ai由有向边<Vk, Vj>,根据AOE网的性质,只有顶点Vk代表的事件发生,活动ai才能开始,即活动ai的最早开始时间等于事件Vk的最早开始时间。
el[i]是指在不推迟真个工期的前提下,活动ai必须开始的最晚时间。若活动ai由有向边<Vk, Vj>表示,则ai的最晚开始时间要保证事件vj的最迟发生时间不拖后。
案例:
原始AOE网:
从源点向终点方向计算
ve[0] = 0
ve[1] = ve[0] + a0 = 0 + 4 = 4
ve[2] = max( ve[0] + a1, ve[1] + a2 ) = max(0 + 3, 4 + 2)= 6
ve[3] = max(ve[1] + a4, ve[2] + a3) = max(4 + 6, 3 + 4) = 10
从终点向源点方向计算
vl[3] = ve[3] = 10
vl[2] = vl[3] - a3 = 10 - 4 = 6
vl[1] = min(vl[3] - a4, vl[2] - a2) = min(10-6, 6-2) = 4
vl[0] = min(vl[2] - a1, vl[1] - a0) = min(4-4, 4-2) = 0
共有五个活动:
ee[0] = ve[0] = 0
ee[1] = ve[0] = 0
ee[2] = ve[1] = 4
ee[3] = ve[2] = 6
ee[4] = ve[1] = 4
el[0] = v[1] - a0 = 4 - 4 = 0
el[1] = vl[2] - a1 = 6 - 3 = 3
el[2] = vl[2] - a2 = 6 - 2 = 4
el[3] = vl[3] - a3 = 10 - 4 = 6
el[4] = vl[3] - a4 = 10 - 6 = 4
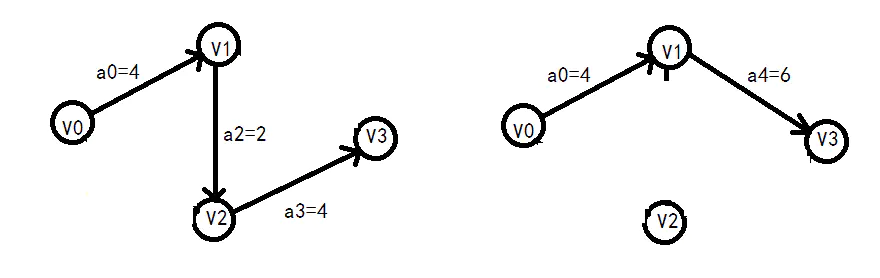
活动的最早开始时间和最晚开始时间相等,则说明该活动时属于关键路径上的活动,即关键活动。
经过比较,得出关键活动有:a0, a2, a3, a4,画出示意图如下:
代码实现
#include "stdio.h" #include "stdlib.h" #include "math.h" #include "time.h" #define OK 1 #define ERROR 0 #define TRUE 1 #define FALSE 0 #define MAXEDGE 30 #define MAXVEX 30 #define INFINITYC 65535 typedef int Status; /* Status是函数的类型,其值是函数结果状态代码,如OK等 */ /* 邻接矩阵结构 */ typedef struct { int vexs[MAXVEX]; int arc[MAXVEX][MAXVEX]; int numVertexes, numEdges; }MGraph; /* 邻接表结构****************** */ //边表结点 typedef struct EdgeNode { //邻接点域,存储该顶点对应的下标 int adjvex; //用于存储权值,对于非网图可以不需要 int weight; //链域,指向下一个邻接点 struct EdgeNode *next; }EdgeNode; //顶点表结点 typedef struct VertexNode { //顶点入度 int in; //顶点域,存储顶点信息 int data; //边表头指针 EdgeNode *firstedge; }VertexNode, AdjList[MAXVEX]; typedef struct { AdjList adjList; //图中当前顶点数和边数 int numVertexes,numEdges; }graphAdjList,*GraphAdjList; /* **************************** */ /* 关于AOE网图的存储代码段-Begin */ //1.完成AOE网图关于邻接矩阵的存储 void CreateMGraph(MGraph *G)/* 构件图 */ { int i, j; /* printf("请输入边数和顶点数:"); */ G->numEdges=13; G->numVertexes=10; for (i = 0; i < G->numVertexes; i++)/* 初始化图 */ { G->vexs[i]=i; } for (i = 0; i < G->numVertexes; i++)/* 初始化图 */ { for ( j = 0; j < G->numVertexes; j++) { if (i==j) G->arc[i][j]=0; else G->arc[i][j]=INFINITYC; } } G->arc[0][1]=3; G->arc[0][2]=4; G->arc[1][3]=5; G->arc[1][4]=6; G->arc[2][3]=8; G->arc[2][5]=7; G->arc[3][4]=3; G->arc[4][6]=9; G->arc[4][7]=4; G->arc[5][7]=6; G->arc[6][9]=2; G->arc[7][8]=5; G->arc[8][9]=3; } //2.将邻近矩阵转化成邻接表 void CreateALGraph(MGraph G,GraphAdjList *GL){ int i,j; EdgeNode *e; *GL = (GraphAdjList)malloc(sizeof(graphAdjList)); (*GL)->numVertexes=G.numVertexes; (*GL)->numEdges=G.numEdges; //读入顶点信息,建立顶点表 for(i= 0;i <G.numVertexes;i++) { (*GL)->adjList[i].in=0; (*GL)->adjList[i].data=G.vexs[i]; //将边表置为空表 (*GL)->adjList[i].firstedge=NULL; } //建立边表 for(i=0;i<G.numVertexes;i++) { for(j=0;j<G.numVertexes;j++) { if (G.arc[i][j]!=0 && G.arc[i][j]<INFINITYC) { e=(EdgeNode *)malloc(sizeof(EdgeNode)); //邻接序号为j e->adjvex=j; e->weight=G.arc[i][j]; //将当前顶点上的指向的结点指针赋值给e e->next=(*GL)->adjList[i].firstedge; //将当前顶点的指针指向e (*GL)->adjList[i].firstedge=e; (*GL)->adjList[j].in++; } } } } /* 关于AOE网图的存储代码段-End! */ int *etv,*ltv; /* 事件最早发生时间和最迟发生时间数组,全局变量 */ int *stack2; /* 用于存储拓扑序列的栈 */ int top2; /* 用于stack2的指针*/ //拓扑排序 Status TopologicalSort(GraphAdjList GL){ //若GL无回路,则输出拓扑排序序列且返回状态OK, 否则返回状态ERROR; EdgeNode *e; int i,k,gettop; //栈指针下标; int top = 0; //用于统计输出的顶点个数.作为拓扑排序是否存在回路的判断依据; int count = 0; //建栈,将入度in = 0的顶点入栈; int *stack = (int *)malloc(GL->numVertexes * sizeof(int)); //遍历顶点表上入度in �= 0 入栈 for (i = 0; i < GL->numVertexes;i++) { //printf("%d %d\n",i,GL->adjList[i].in); if ( 0 == GL->adjList[i].in ) { stack[++top] = i; } } //* stack2 的栈指针下标 top2 = 0; //* 初始化拓扑序列栈 stack2 = (int *)malloc(sizeof(int) * GL->numVertexes); //* 事件最早发生时间数组 etv = (int *)malloc(sizeof(GL->numVertexes * sizeof(int))); //* 初始化etv 数组 for (i = 0 ; i < GL->numVertexes; i++) { //初始化 etv[i] = 0; } printf("TopologicSort:\t"); while (top != 0) { gettop = stack[top--]; printf("%d -> ", GL->adjList[gettop].data); count++; //将弹出的顶点序号压入拓扑排序的栈中; stack2[++top2] = gettop; //例如gettop为V0 ,那么与V0相连接的结点就有etv[1] = 3; etv[2] = 4; //例如gettop为V1 ,那么与V1连接的结点就有etv[4]= 3+6=9; etv[3] = 8; //例如gettop为V2 ,那么与V2连接的结点就有etv[5]= 4+7=11; etv[3] = 12; //例如gettop为V3 ,那么与V3连接的结点就有etv[4]= 12+3=15; for(e = GL->adjList[gettop].firstedge; e; e = e->next) { k = e->adjvex; //将i顶点连接的邻接顶点入度减1,如果入度减一后为0,则入栈 if(!(--GL->adjList[k].in)) stack[++top] = k; //求各顶点事件的最早发生的时间etv值 //printf("etv[gettop]+e->weight = %d\n",etv[gettop]+e->weight); //printf("etv[%d] = %d\n",k,etv[k]); if ((etv[gettop] + e->weight) > etv[k]) { etv[k] = etv[gettop] + e->weight; } } } printf("\n"); //打印etv(事件最早发生时间数组) // for (i = 0; i < GL->numVertexes; i++) { // printf("etv[%d] = %d\n",i,etv[i]); // } // printf("\n"); if(count < GL->numVertexes) return ERROR; else return OK; return OK; } //求关键路径, GL为有向网,则输出G的各项关键活动; void CriticalPath(GraphAdjList GL){ EdgeNode *e; int i,gettop,k,j; //声明活动最早发生时间和最迟发生时间变量; int ete,lte; //求得拓扑序列,计算etv数组以及stack2的值 TopologicalSort(GL); //打印etv数组(事件最早发生时间) printf("etv:\n"); for(i = 0; i < GL->numVertexes; i++) printf("etv[%d] = %d \n",i,etv[i]); printf("\n"); //事件最晚发生时间数组 ltv = (int *)malloc(sizeof(int) * GL->numVertexes); //初始化ltv数组 for (i = 0; i < GL->numVertexes; i++) { //初始化ltv数组. 赋值etv最后一个事件的值 ltv[i] = etv[GL->numVertexes-1]; //printf("ltv[%d] = %d\n",i,ltv[i]); } //计算ltv(事件最晚发生时间) 出栈求ltv while (top2 != 0) { //出栈(栈顶元素) gettop = stack2[top2--]; //找到与栈顶元素连接的顶点; 例如V0是与V1和V2连接 for (e = GL->adjList[gettop].firstedge; e; e = e->next) { //获取与gettop 相连接的顶点 k = e->adjvex; //计算min(ltv[k]-e->weight,ltv[gettop]) if (ltv[k] - e->weight < ltv[gettop]) { //更新ltv 数组 ltv[gettop] = ltv[k] - e->weight; } } } //打印ltv 数组 printf("ltv:\n"); for (i = 0 ; i < GL->numVertexes; i++) { printf("ltv[%d] = %d \n",i,ltv[i]); } printf("\n"); //求解ete,lte 并且判断lte与ete 是否相等.相等则是关键活动; //2层循环(遍历顶点表,边表) for(j=0; j<GL->numVertexes;j++) { for (e = GL->adjList[j].firstedge; e; e = e->next) { //获取与j连接的顶点; k = e->adjvex; //ete 就是表示活动 <Vk, Vj> 的最早开工时间, 是针对这条弧来说的.而这条弧的弧尾顶点Vk 的事件发生了, 它才可以发生. 因此ete = etv[k]; ete = etv[j]; //lte 表示活动<Vk, Vj> 的最晚开工时间, 但此活动再晚也不能等Vj 事件发生才开始,而是必须在Vj 事件之前发生. 所以lte = ltv[j] - len<Vk, Vj>. lte = ltv[k]-e->weight; //如果ete == lte 则输出j,k以及权值; if (ete == lte) { printf("<%d-%d> length:%d\n",GL->adjList[j].data, GL->adjList[k].data, e->weight); } } } } int main(int argc, const char * argv[]) { // insert code here... printf("Hello, 关键路径的求解!\n"); MGraph G; GraphAdjList GL; CreateMGraph(&G); CreateALGraph(G,&GL); //拓扑排序 //TopologicalSort(GL); //关键路径 CriticalPath(GL); return 0; }
注意


 浙公网安备 33010602011771号
浙公网安备 33010602011771号