
1. 应用需求与实现思路
对于常用的三相两电平变流器,通常应使三桥臂的载波为同步的三角载波。为方便控制,常在三角载波过零处进入中断进行采样何控制。当采用STM32的HRTIM实现该功能时,一种思路为:采用主定时器实现中断,并采用之对三个桥臂实用的载波进行同步。
基本设置参数为:
- 开关频率:10kHz;
- 死区时间:1μs;
2. 主定时器(Master Timer)
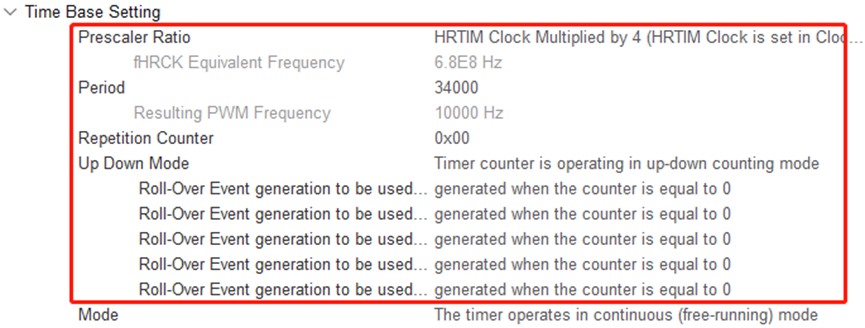
主定时器时基配置如下:

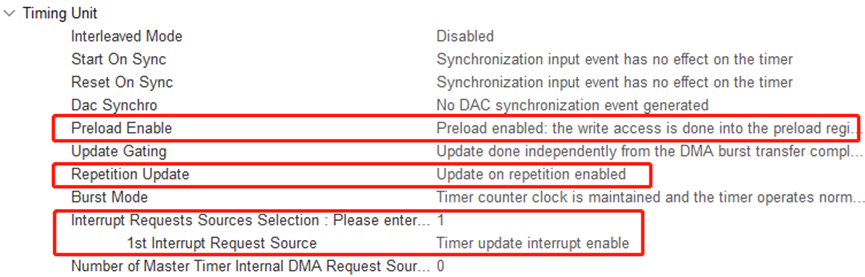
采用预装载(Preload)设置,当定时器进Update时进入中断,如下:
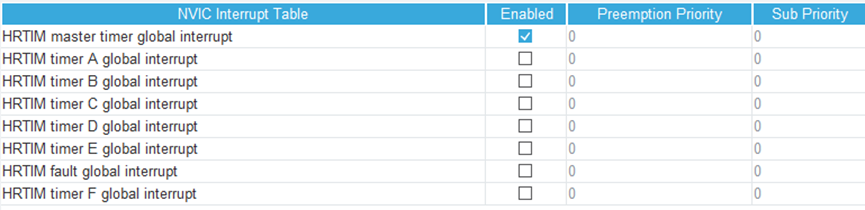
并开启主定时器的全局中断,如下:
3. 载波定时器(TimerA-TimerF)
采用上下计数模式,设置counter等于0时触发事件,确保载波过0处才将影子寄存器中的compare值锁存至active寄存器中。如下:
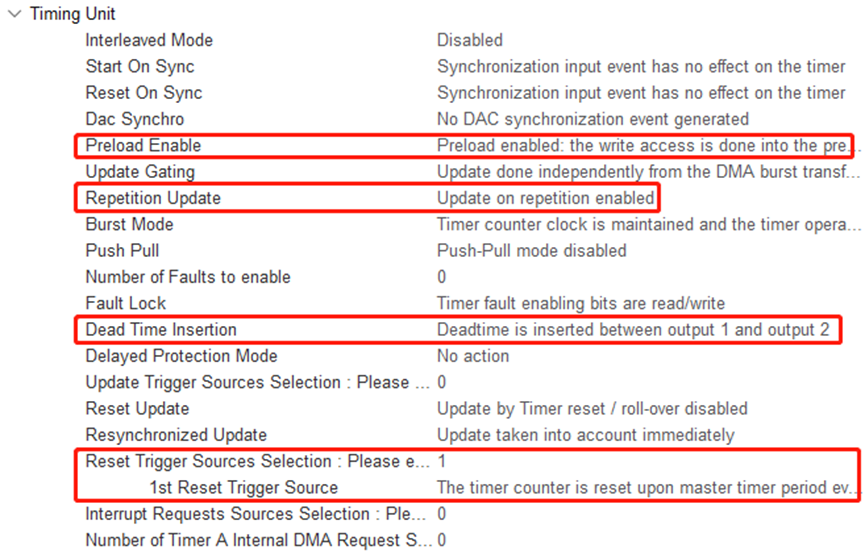
使能预装载(Preload),结合上面的设置,实现控制中延迟为固定的一周期。使能死区,并配置主定时器Period事件发生时载波定时器Reset。如下:
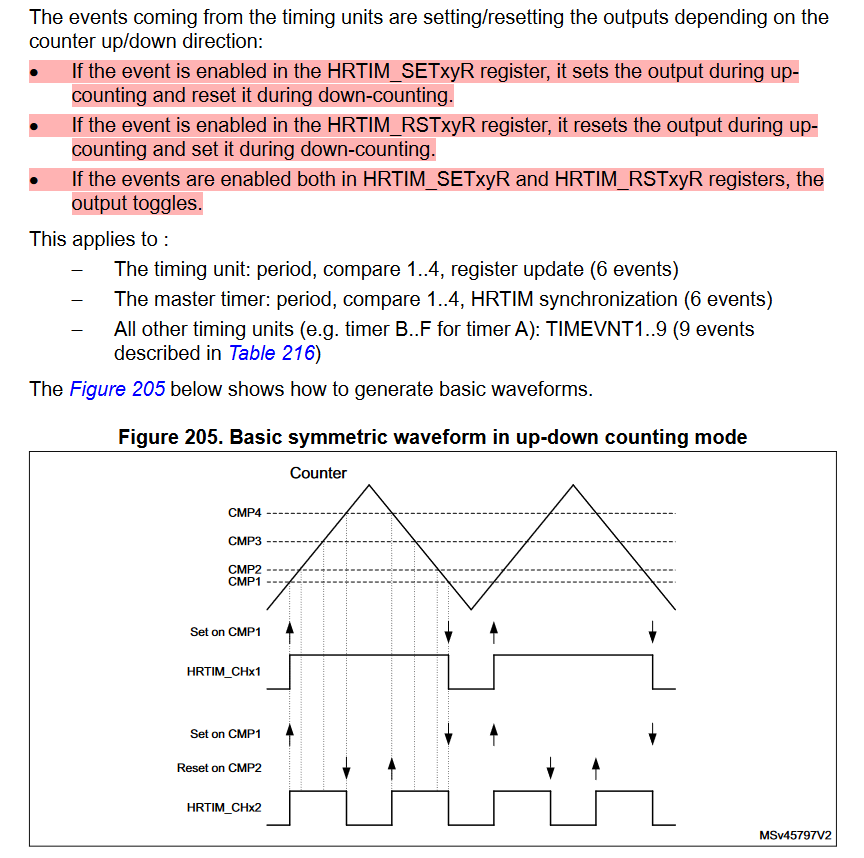
使能Compare Unit 1(也可以时其他Unit),并配置为counter值与compare值相等时触发事件。如下:

死区配置如下:
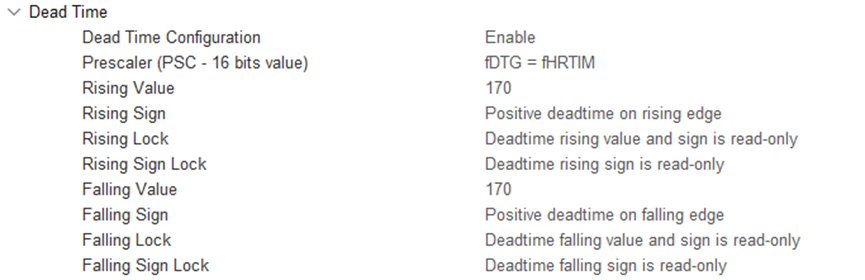
对于上下计数模式,需配置为compare事件发生时输出inactive状态:
因此Output 1 Configuration设置如下:
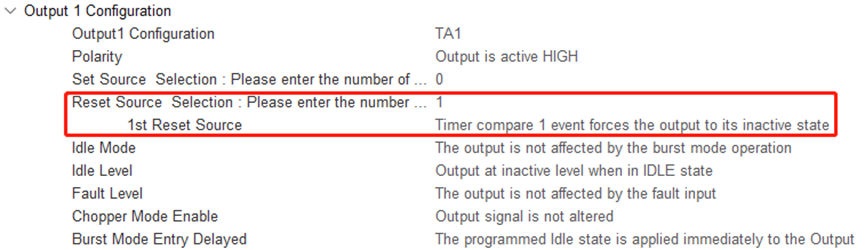
由于设置了死区所以Output 2不用配置。
4. 库函数API说明
完成上述配置后,需调用相关API以控制相应的定时器。包括:
开启定时器(如需停止定时器只需将函数中的Start改成Stop即可):
HAL_HRTIM_WaveformCountStart(&hhrtim1, HRTIM_TIMERID_TIMER_A);
HAL_HRTIM_WaveformCountStart(&hhrtim1, HRTIM_TIMERID_TIMER_B);
HAL_HRTIM_WaveformCountStart(&hhrtim1, HRTIM_TIMERID_TIMER_C);
HAL_HRTIM_WaveformCountStart(&hhrtim1, HRTIM_TIMERID_TIMER_D);
HAL_HRTIM_WaveformCountStart(&hhrtim1, HRTIM_TIMERID_TIMER_E);
HAL_HRTIM_WaveformCountStart(&hhrtim1, HRTIM_TIMERID_TIMER_F);
HAL_HRTIM_WaveformCountStart_IT(&hhrtim1, HRTIM_TIMERID_MASTER);
使能输出(如需停止输出只需将函数中的Start改成Stop即可):
HAL_HRTIM_WaveformOutputStart(&hhrtim1, HRTIM_OUTPUT_TA1 | HRTIM_OUTPUT_TA2);
HAL_HRTIM_WaveformOutputStart(&hhrtim1, HRTIM_OUTPUT_TB1 | HRTIM_OUTPUT_TB2);
HAL_HRTIM_WaveformOutputStart(&hhrtim1, HRTIM_OUTPUT_TC1 | HRTIM_OUTPUT_TC2);
HAL_HRTIM_WaveformOutputStart(&hhrtim1, HRTIM_OUTPUT_TD1 | HRTIM_OUTPUT_TD2);
HAL_HRTIM_WaveformOutputStart(&hhrtim1, HRTIM_OUTPUT_TE1 | HRTIM_OUTPUT_TE2);
HAL_HRTIM_WaveformOutputStart(&hhrtim1, HRTIM_OUTPUT_TF1 | HRTIM_OUTPUT_TF2);
设置比较值以设置占空比(0x0-0x5分别指TimerA-TimerF):
__HAL_HRTIM_SETCOMPARE(&hhrtim1, 0x0, HRTIM_COMPAREUNIT_1, ((uint32_t)(_LEG_TIMER_PRD * _DUTY)));
__HAL_HRTIM_SETCOMPARE(&hhrtim1, 0x1, HRTIM_COMPAREUNIT_1, ((uint32_t)(_LEG_TIMER_PRD * _DUTY)));
__HAL_HRTIM_SETCOMPARE(&hhrtim1, 0x2, HRTIM_COMPAREUNIT_1, ((uint32_t)(_LEG_TIMER_PRD * _DUTY)));
__HAL_HRTIM_SETCOMPARE(&hhrtim1, 0x3, HRTIM_COMPAREUNIT_1, ((uint32_t)(_LEG_TIMER_PRD * _DUTY)));
__HAL_HRTIM_SETCOMPARE(&hhrtim1, 0x4, HRTIM_COMPAREUNIT_1, ((uint32_t)(_LEG_TIMER_PRD * _DUTY)));
__HAL_HRTIM_SETCOMPARE(&hhrtim1, 0x5, HRTIM_COMPAREUNIT_1, ((uint32_t)(_LEG_TIMER_PRD * _DUTY)));
5. 波形说明
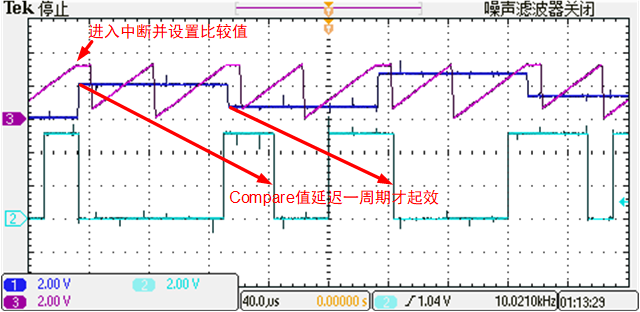
TimerA-TimerF的上下计数模式似乎并非真正的上下计数模式,而是二倍频的向上计数模式,但对于PWM输出,效果是一致的,如下(CH1为TimerA的compare值,CH2为Output1,CH3为TimerA的counter值):
Provided by 昨夜三更雨, see https://www.cnblogs.com/zysgy/p/16622418.html


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· ollama系列1:轻松3步本地部署deepseek,普通电脑可用
· 按钮权限的设计及实现
· Apache Tomcat RCE漏洞复现(CVE-2025-24813)