
SLAM系统--开启摄像头连接
基于ORB-SLAM3库搭建SLAM系统 详见之前的博客
参考链接
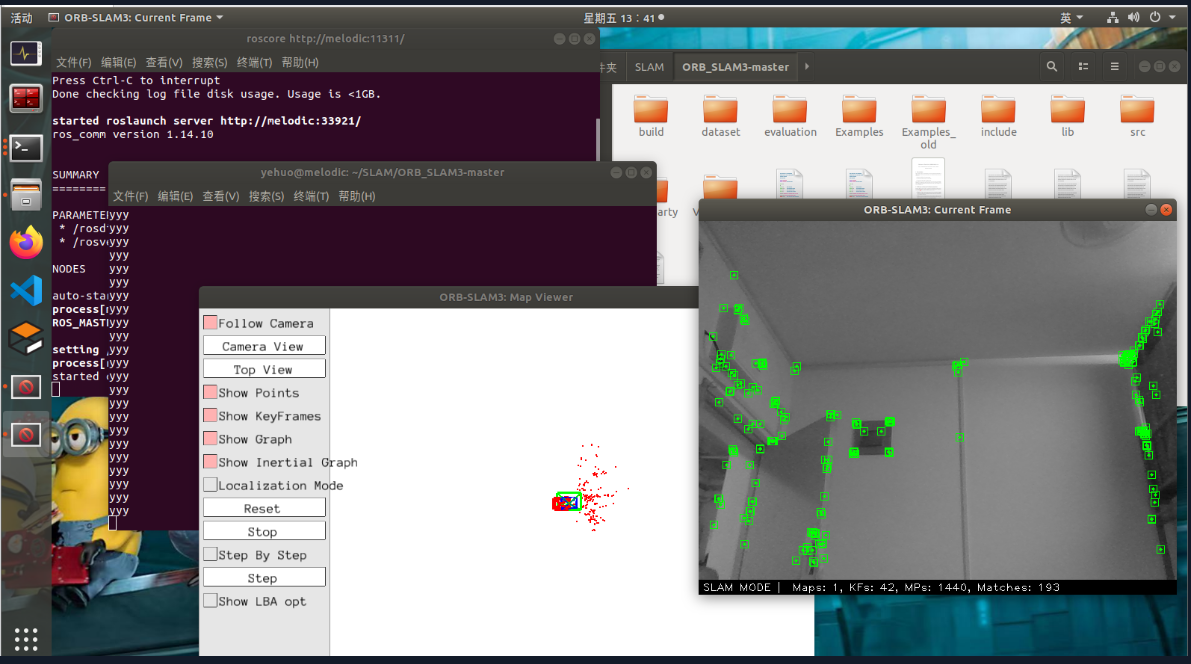
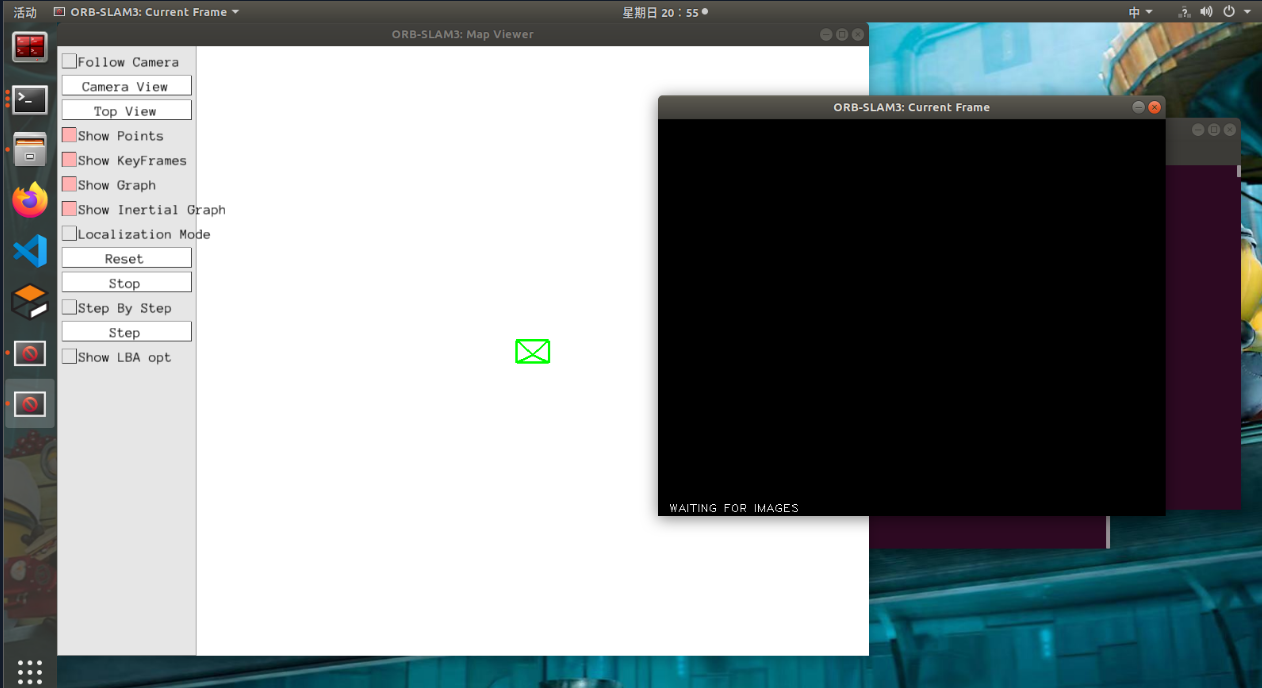
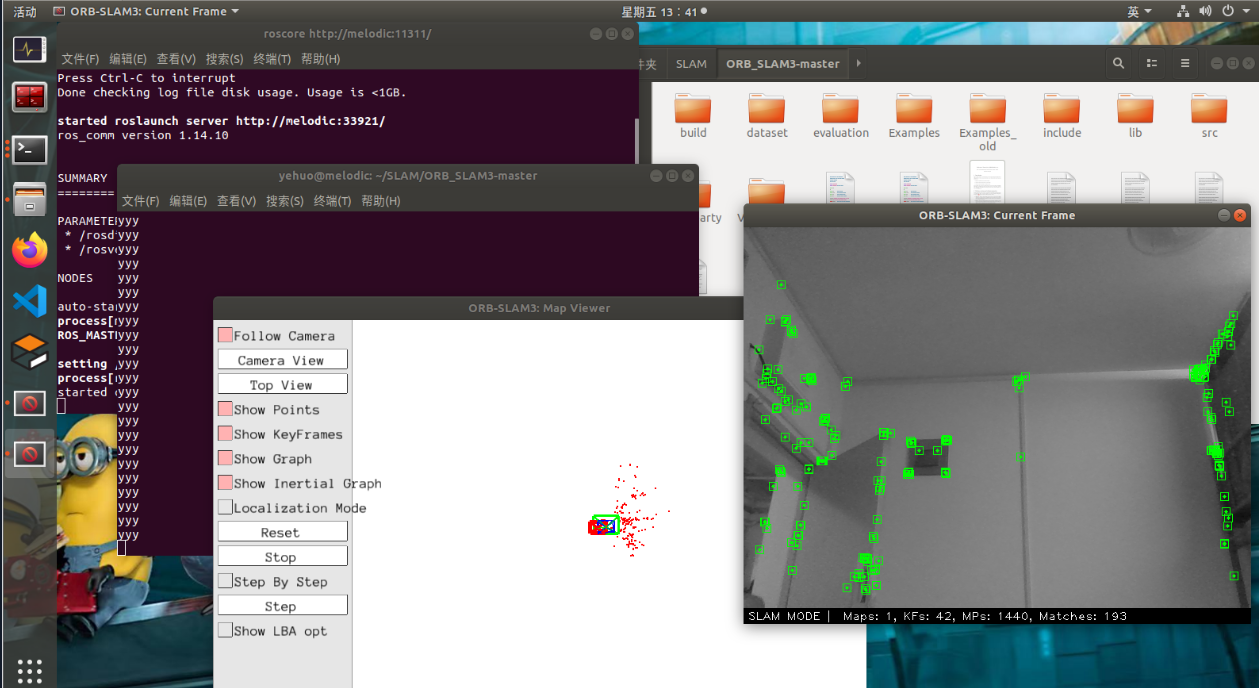
效果图
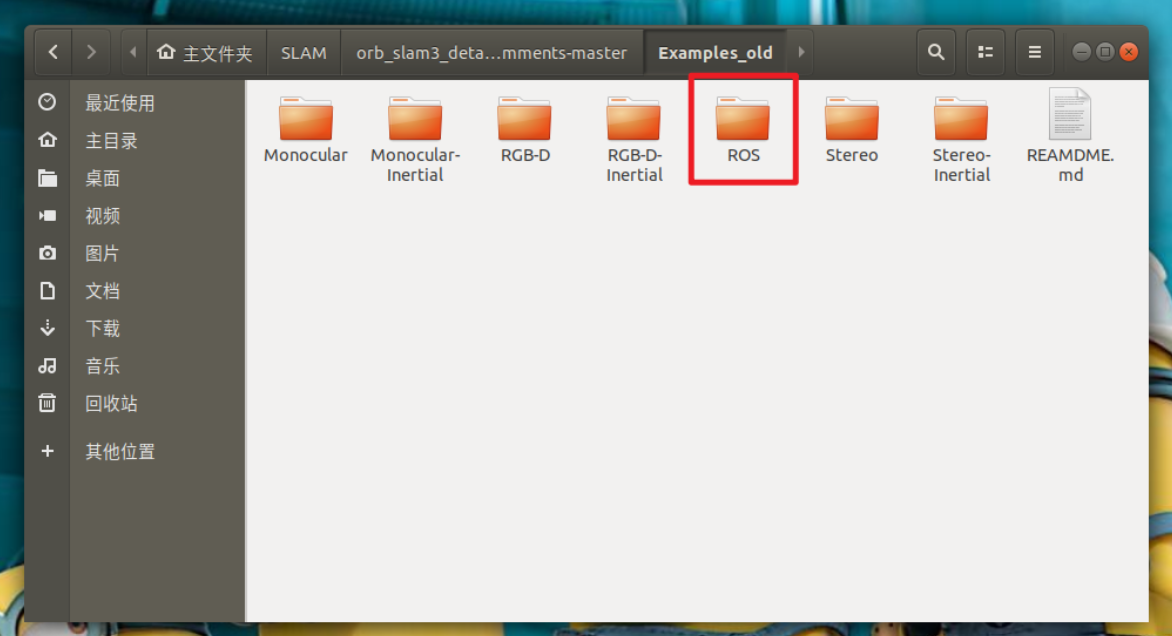
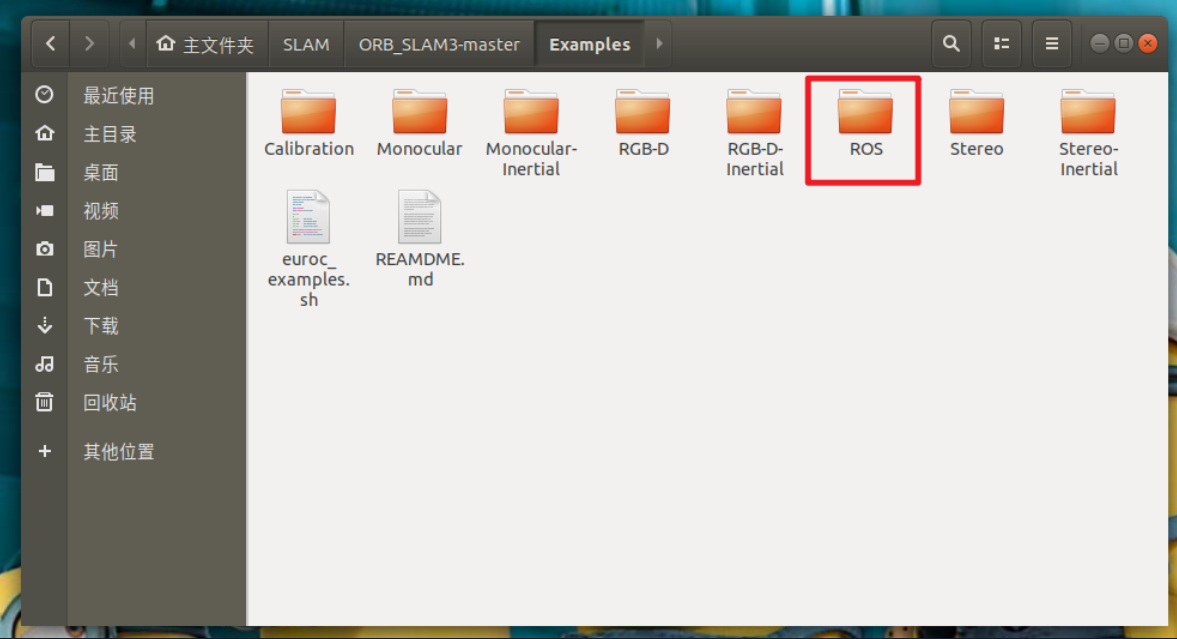
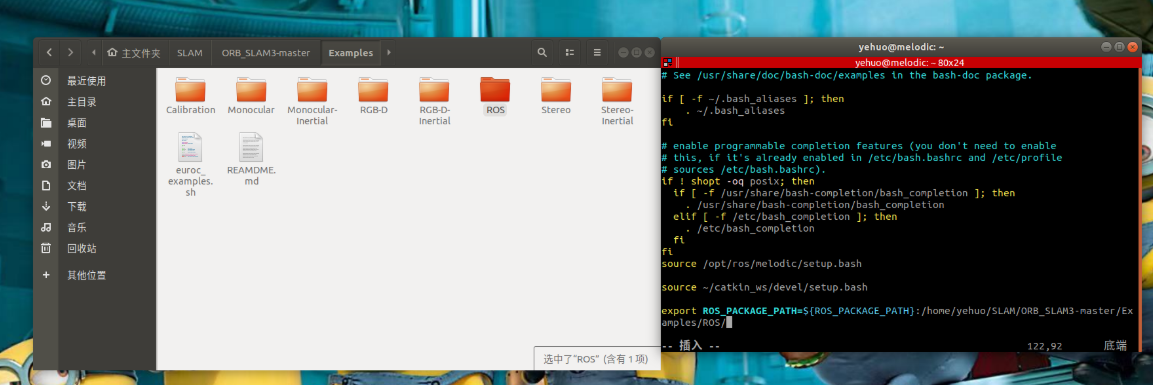
STEP1:将 Examples_old 中的 ROS 文件夹复制到 /home/yehuo/SLAM/ORB_SLAM3-master/Examples/
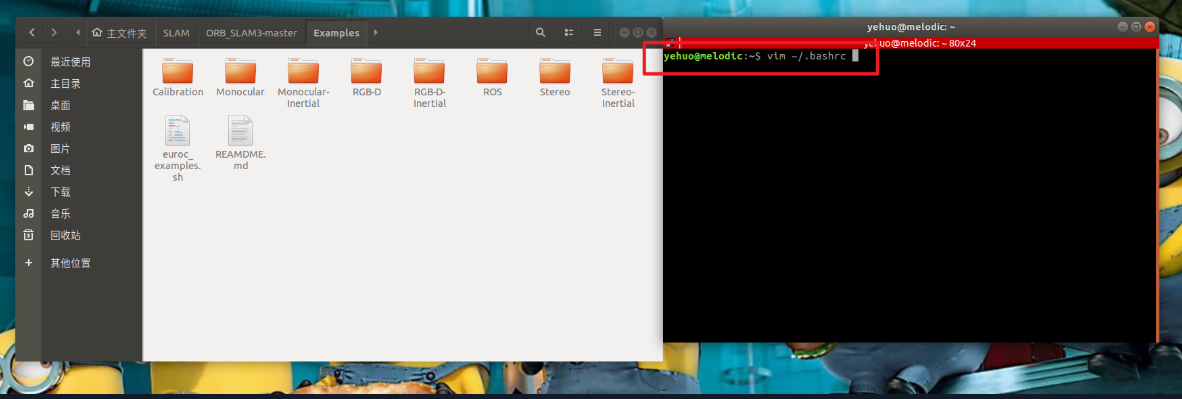
打开终端输入指令: vim ~/.bashrc 打开用户根目录下的.bashrc文件
添加ROS功能包路径 export
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/yehuo/SLAM/ORB_SLAM3-master/Examples/ROS
此处路径需要根据每个人放置功能包的位置进行调整,不能直接复制
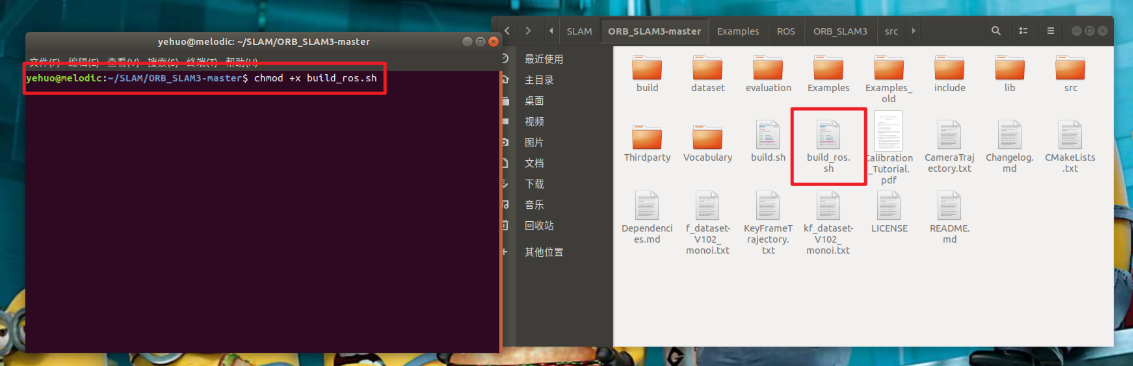
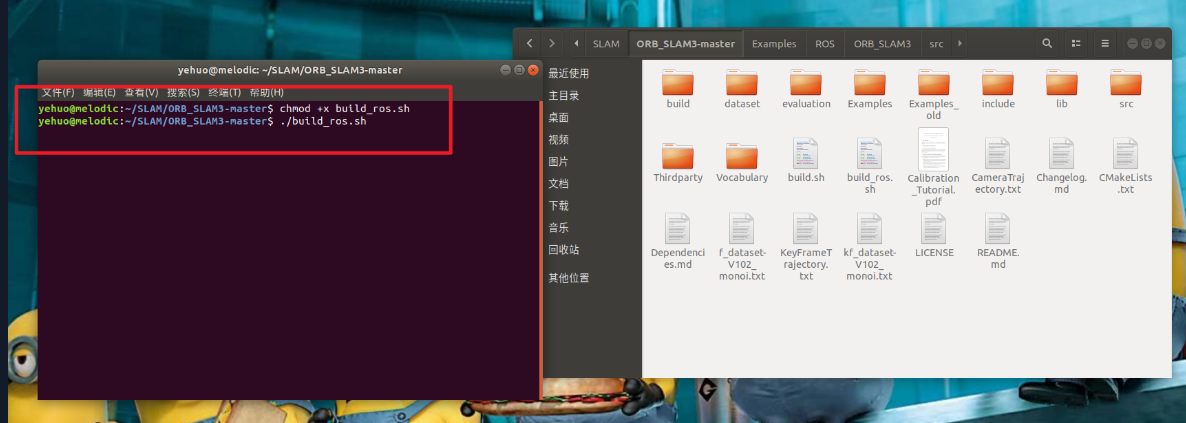
STEP2:授权+编译
chmod +x build_ros.sh ##修改Build_ros.sh权限
./build_ros.sh ##安装 orb_slam 中的 ros模块
STEP3:创建 camera.py 文件
#!/usr/bin/env python
#!coding-utf -8
import rospy
from sensor_msgs.msg import Image
import cv2
from cv_bridge import CvBridge
import sys
def webcamImagePub():
rospy.init_node('cam_pub',anonymous=True)
img_pub = rospy.Publisher('camera/image_raw',Image,queue_size=2)
rate = rospy.Rate(20)
cap = cv2.VideoCapture(0)
scaling_factor = 0.3
bridge = CvBridge()
if not cap.isOpened():
sys.stdout.write("zzz")
return -1
count = 0
while not rospy.is_shutdown():
ret,frame = cap.read()
if ret:
count = count + 1
else:
rospy.loginfo("xxx")
if count == 2:
count = 0
msg = bridge.cv2_to_imgmsg(frame)
img_pub.publish(msg)
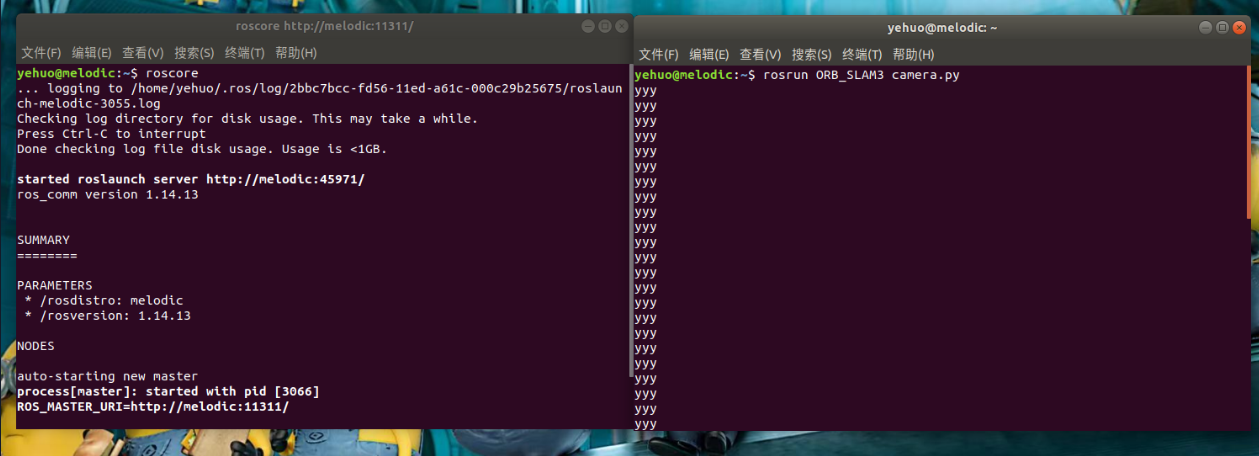
print("yyy")
rate.sleep()
if __name__ == '__main__':
try:
webcamImagePub()
except rospy.ROSInterruptException:
pass
将camera.py放入 /Examples/ROS/ORB_SLAM3/scripts/ 文件夹下,(scripts文件夹需要自己创建)
打开终端执行 chmod+x camera.py 赋予可执行权限
STEP4:配置连接电脑摄像头
(1)在windows中使用 win + R 快捷键开启运行搜索界面
(2)输入services.msc,在服务中找到 VMware USB Arbitration Service,使其处于 ‘正在运行’ 状态

(3)在VMware虚拟机->设置选项下,调整USB控制器为兼容USB3.1状态

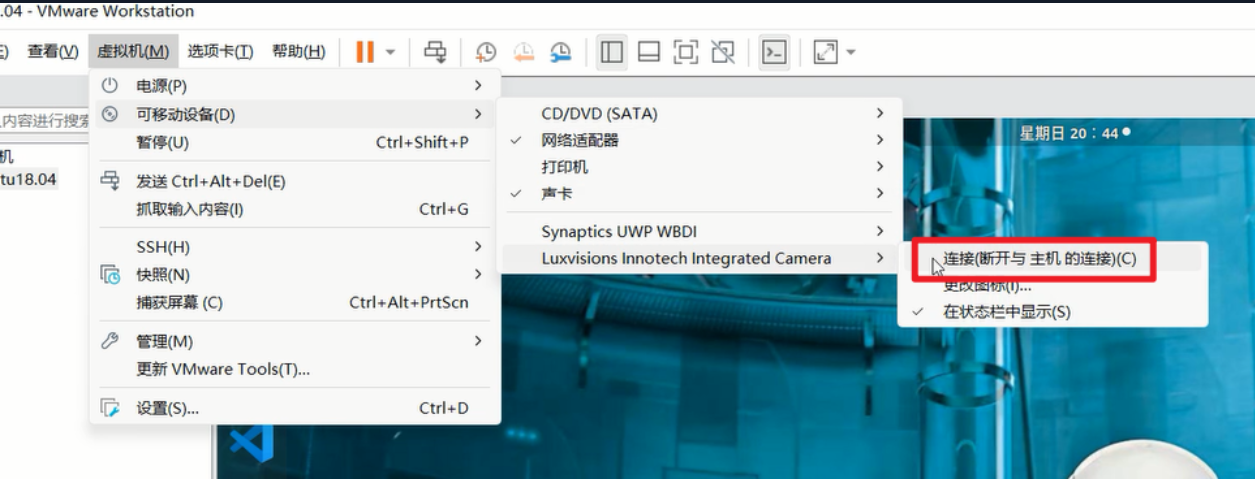
(4)连接电脑摄像头
STEP5:运行测试
【1】运行 camera.py 文件
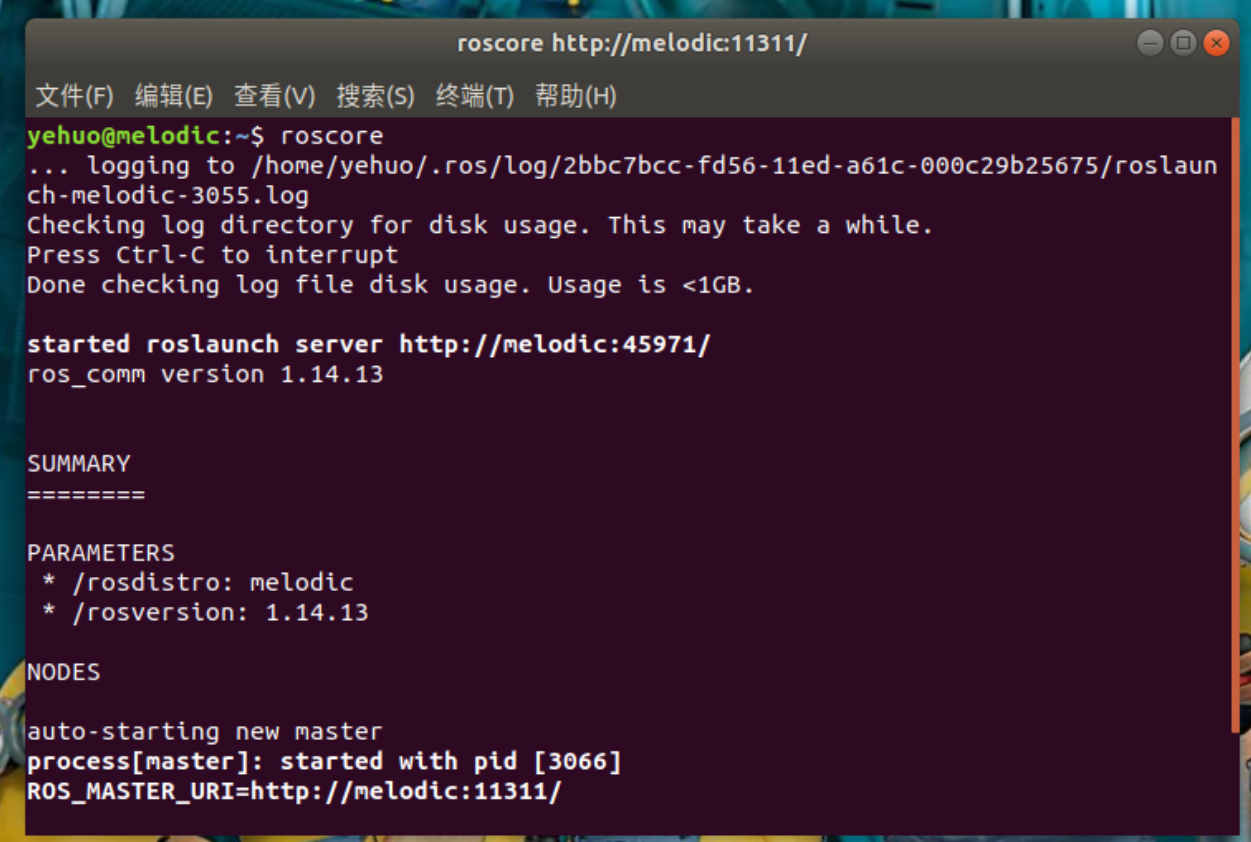
打开终端
执行 roscore
打开新的终端
执行 rosrun ORB_SLAM3 camera.py
【2】启动例程
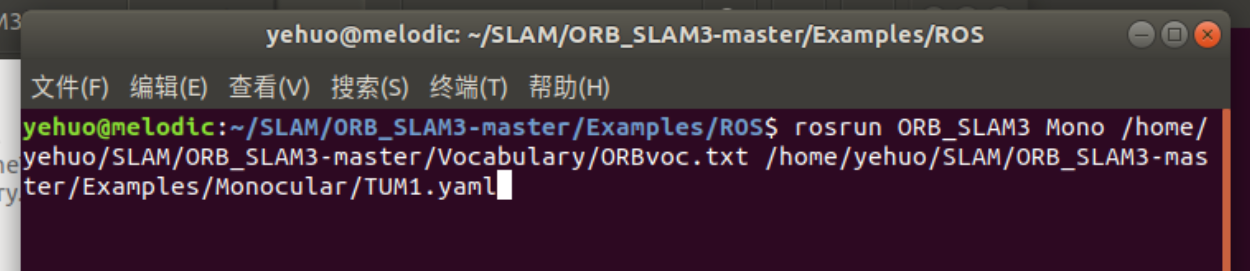
在以下路径下打开终端
在终端输入以下指令 === 注意修改路径
rosrun ORB_SLAM3 Mono /home/yehuo/SLAM/ORB_SLAM3-master/Vocabulary/ORBvoc.txt /home/yehuo/SLAM/ORB_SLAM3-master/Examples/Monocular/TUM1.yaml
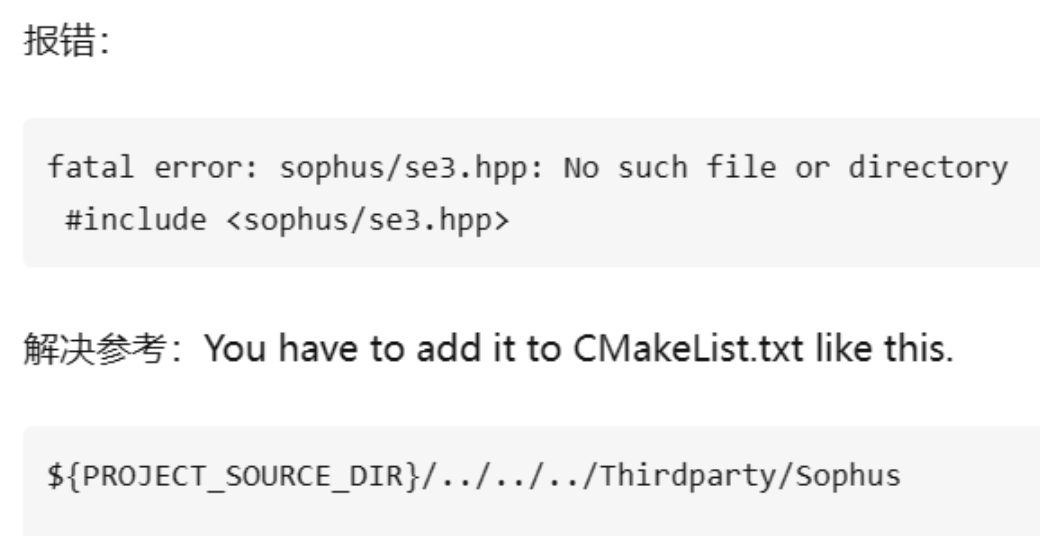
问题汇总
(1)fatal error:sophus/se3.hpp
(2)/usr/bin/env: "python\r": 没有那个文件或目录
解决方法,参考以下链接
(3)./build_ros.sh 步骤中报错
解决办法,参考以下链接
本文作者:zylyehuo
本文链接:https://www.cnblogs.com/zylyehuo/p/17438873.html
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。
标签:
ROS



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步