
基于机器人自主移动实现SLAM建图
基于[移动机器人运动规划及运动仿真],详见之前的博客
参考链接
环境配置
ubuntu 18.04
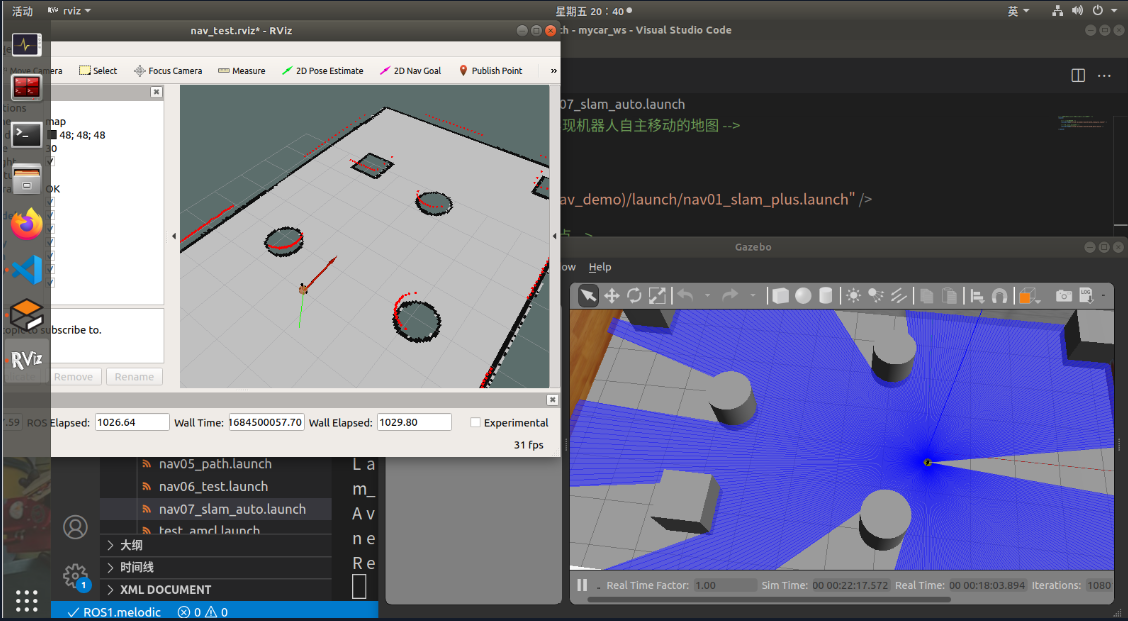
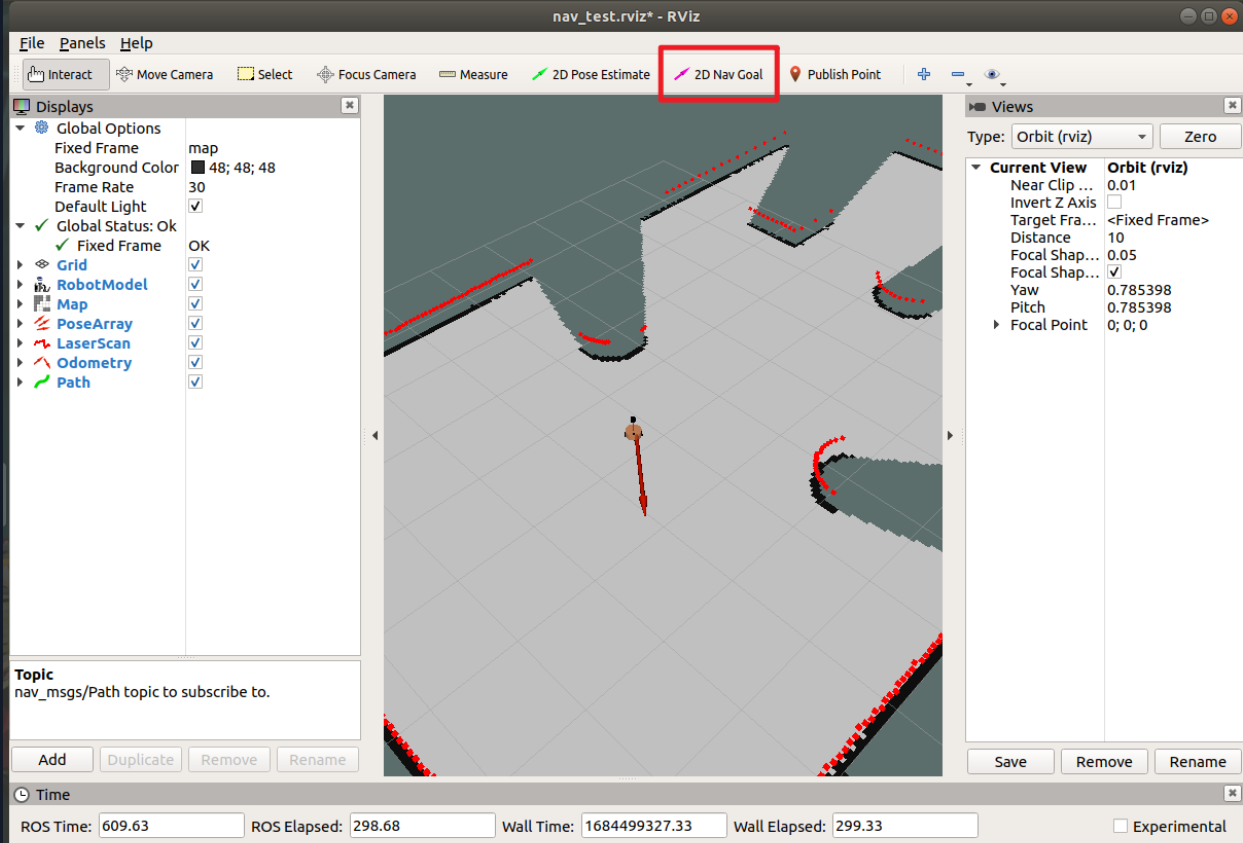
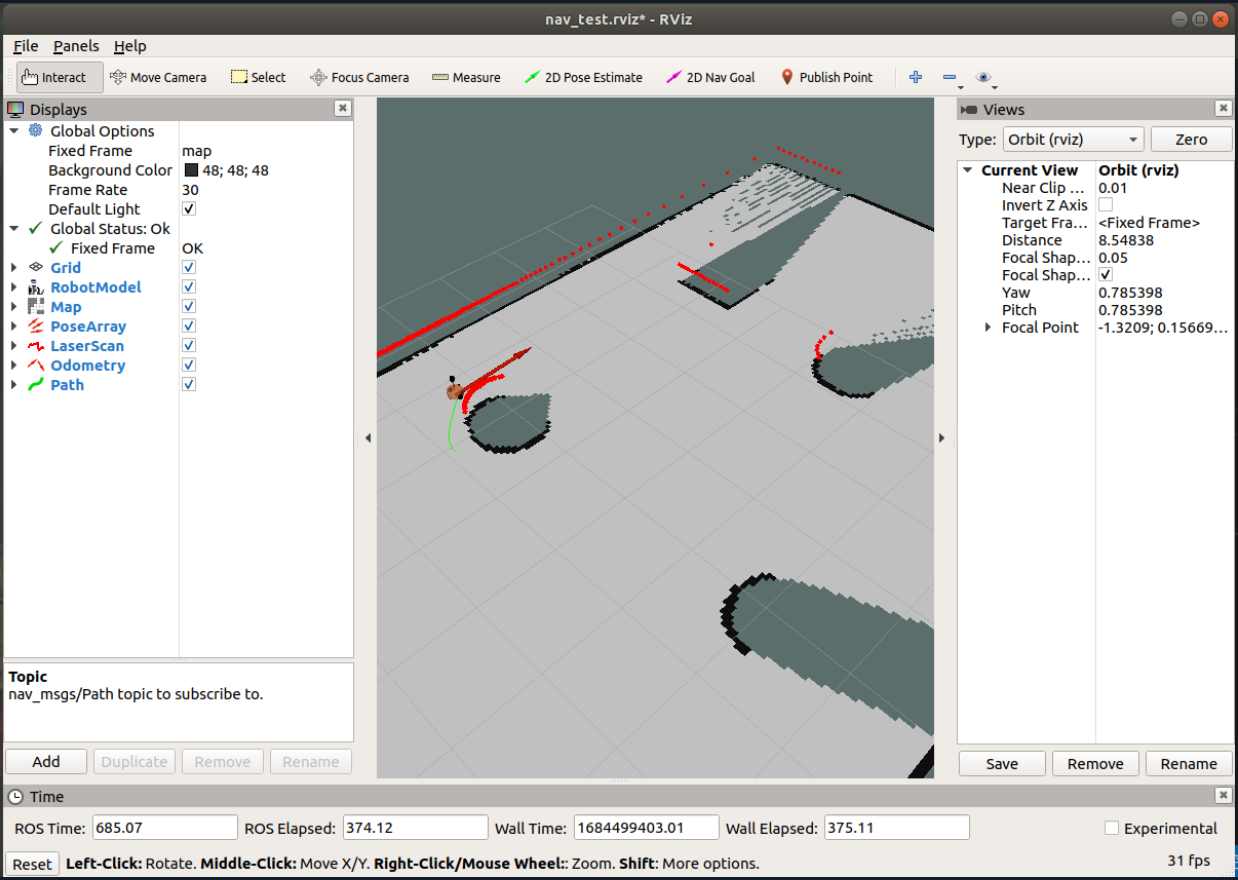
成果图
step1: 编写 launch 文件
mycar_ws/src/nav_demo/launch/nav01_slam_plus.launch
<launch>
<!-- 仿真环境下,将该参数设置为true -->
<param name="use_sim_time" value="true"/>
<!-- gmapping -->
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<!-- 设置雷达话题 -->
<remap from="scan" to="scan"/>
<!-- 关键参数:坐标系 -->
<param name="base_frame" value="base_footprint"/><!--底盘坐标系-->
<param name="map_frame" value="map"/>
<param name="odom_frame" value="odom"/> <!--里程计坐标系-->
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="16.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="1.0"/>
<param name="angularUpdate" value="0.5"/>
<param name="temporalUpdate" value="3.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
</node>
<node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" />
<node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find nav_demo)/config/nav_test.rviz"/>
</launch>
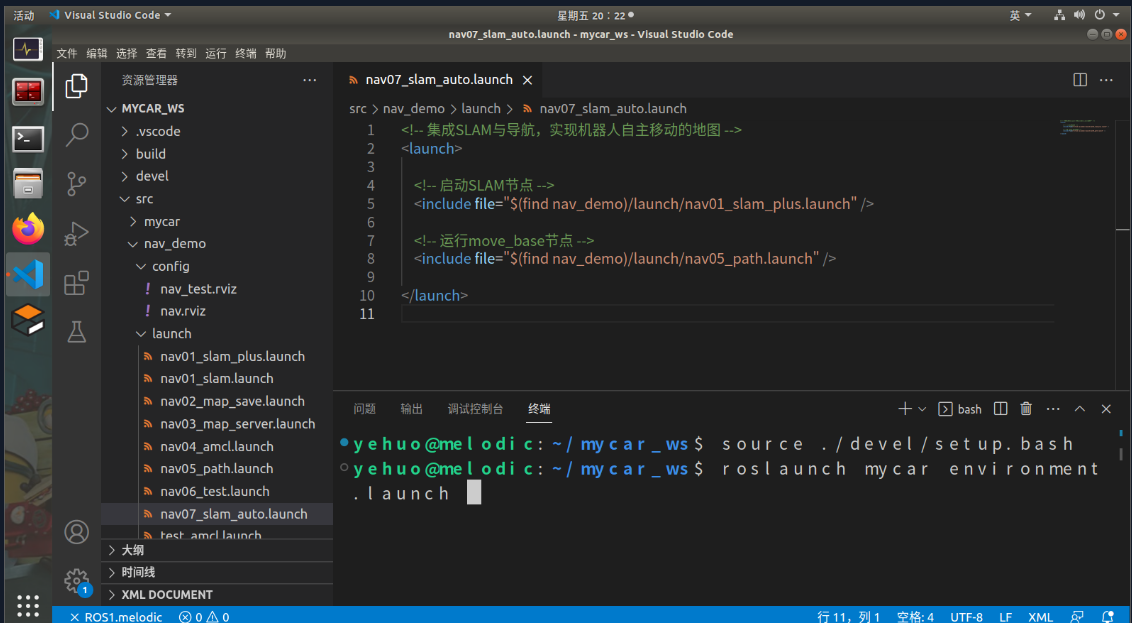
mycar_ws/src/nav_demo/launch/nav07_slam_auto.launch
<!-- 集成SLAM与导航,实现机器人自主移动的地图 -->
<launch>
<!-- 启动SLAM节点 -->
<include file="$(find nav_demo)/launch/nav01_slam_plus.launch" />
<!-- 运行move_base节点 -->
<include file="$(find nav_demo)/launch/nav05_path.launch" />
</launch>
step2: 编译+启动 gazebo 仿真环境
source ./devel/setup.bash
roslaunch mycar environment.launch
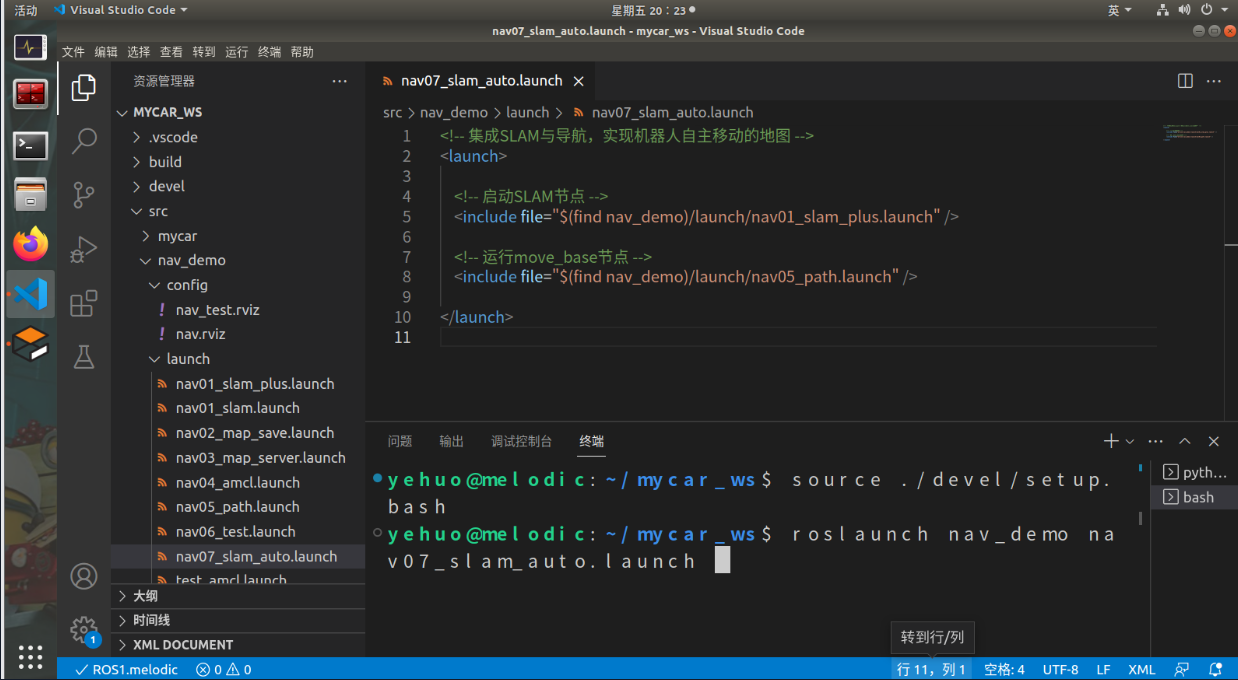
step3: 编译+启动 rviz
source ./devel/setup.bash
roslaunch nav_demo nav07_slam_auto.launch

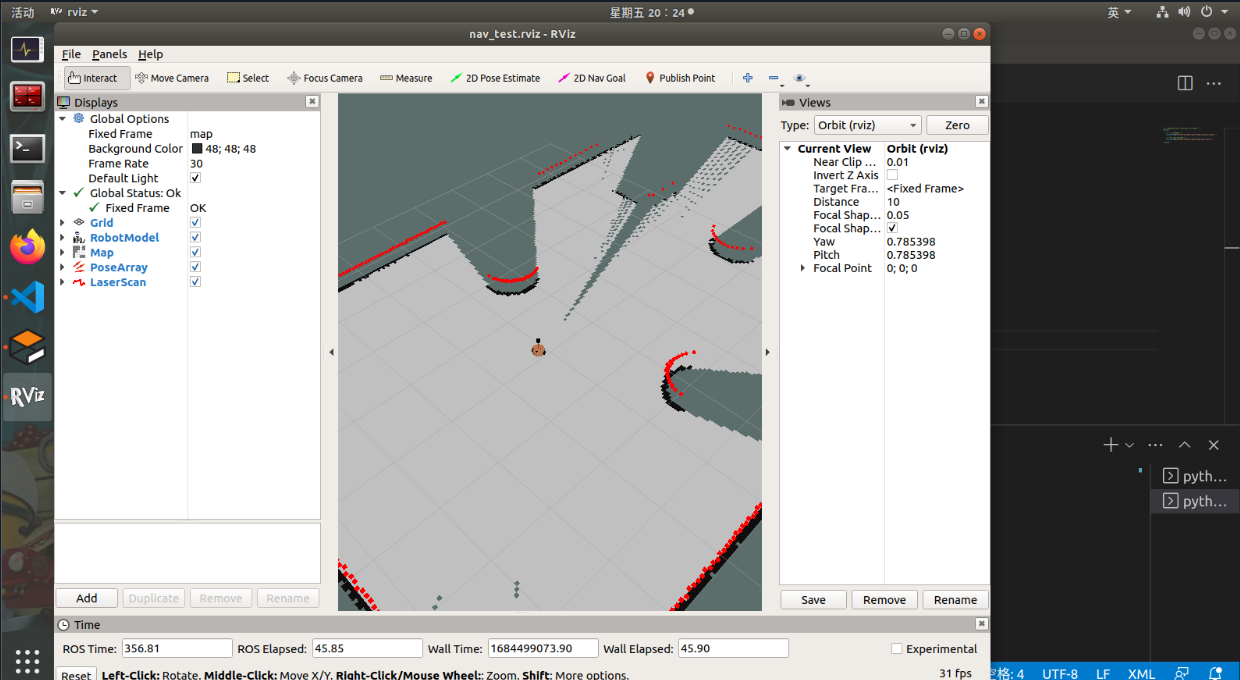
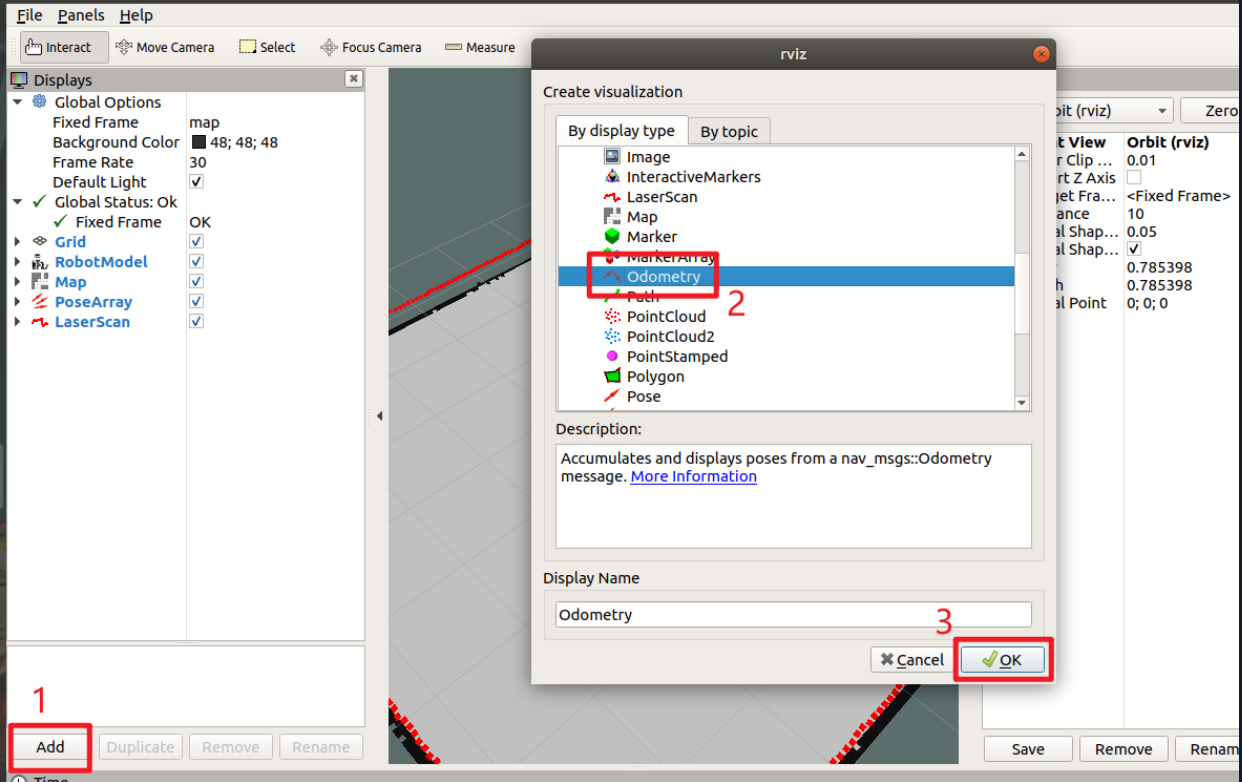
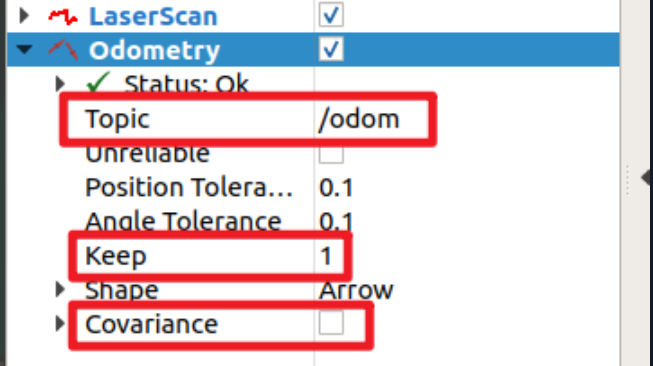
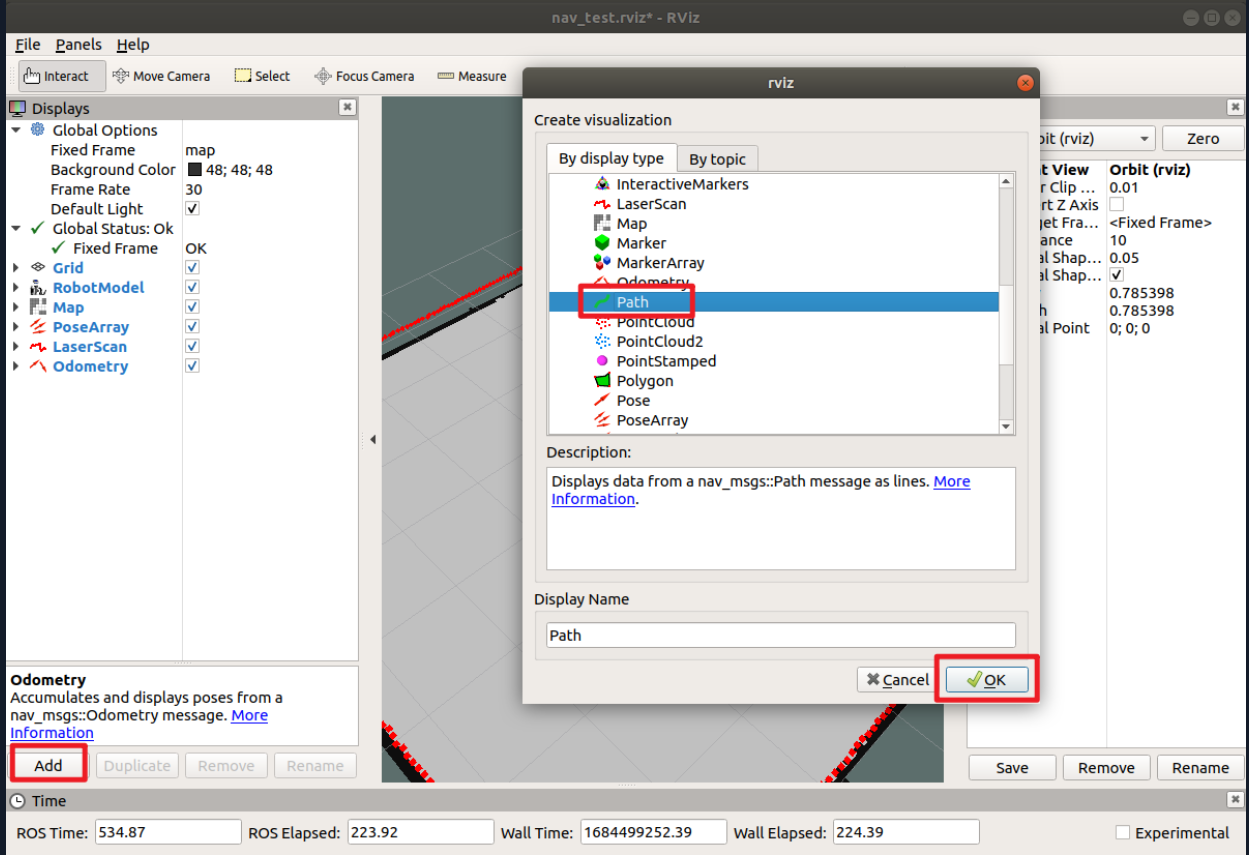
step4: 配置 rviz
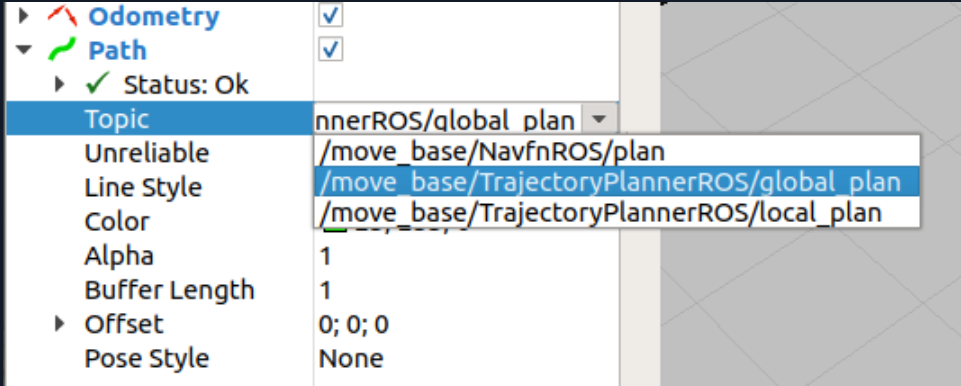
step5: 运行测试

本文作者:zylyehuo
本文链接:https://www.cnblogs.com/zylyehuo/p/17416406.html
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· 阿里巴巴 QwQ-32B真的超越了 DeepSeek R-1吗?
· 如何调用 DeepSeek 的自然语言处理 API 接口并集成到在线客服系统
· 【译】Visual Studio 中新的强大生产力特性
· 2025年我用 Compose 写了一个 Todo App