第三十三节,目标检测之选择性搜索-Selective Search
在基于深度学习的目标检测算法的综述 那一节中我们提到基于区域提名的目标检测中广泛使用的选择性搜索算法。并且该算法后来被应用到了R-CNN,SPP-Net,Fast R-CNN中。因此我认为还是有研究的必要。
传统的目标检测算法大多数以图像识别为基础。一般可以在图片上使用穷举法或者滑动窗口选出所有物体可能出现的区域框,对这些区域框提取特征并进行使用图像识别分类方法,得到所有分类成功的区域后,通过非极大值抑制输出结果。
在图片上使用穷举法或者滑动窗口选出所有物体可能出现的区域框,就是在原始图片上进行不同尺度不同大小的滑窗,获取每个可能的位置。而这样做的缺点也显而易见,复杂度太高,产生了很多的冗余候选区域,而且由于不可能每个尺度都兼顾到,因此得到的目标位置也不可能那么准,在现实当中不可行。而选择性搜索有效地去除冗余候选区域,使得计算量大大的减小。
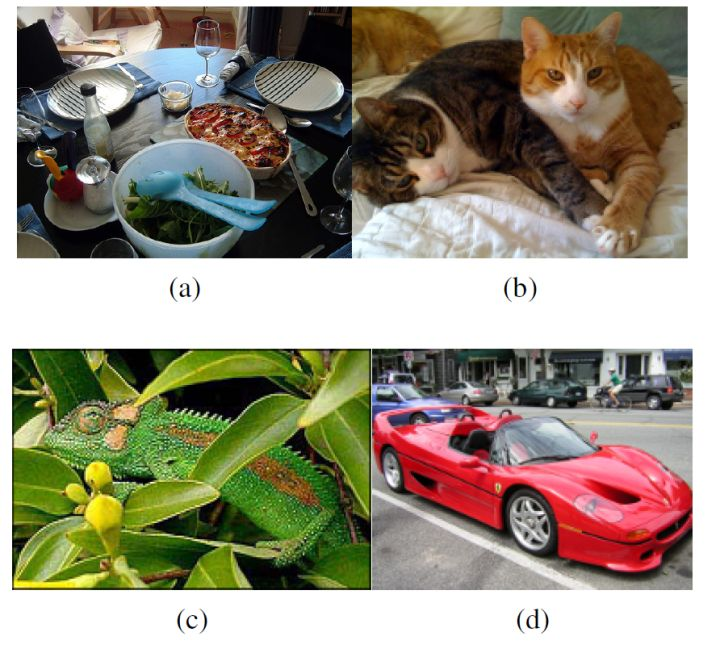
我们先来看一组图片,由于我们事先不知道需要检测哪个类别,因此第一张图的桌子、瓶子、餐具都是一个个候选目标,而餐具包含在桌子这个目标内,勺子又包含在碗内。这张图展示了目标检测的层级关系以及尺度关系,那我们如何去获得这些可能目标的位置呢。我们能不能通过视觉特征去减少候选框的数量并提高精确度呢。
可用的特征有很多,到底什么特征是有用的呢?我们看第二副图片的两只猫咪,他们的纹理是一样的,因此纹理特征肯定不行了。而如果通过颜色则能很好区分。但是第三幅图变色龙可就不行了,这时候边缘特征、纹理特征又显得比较有用。而在最后一幅图中,我们很容易把车和轮胎看作是一个整体,但是其实这两者的特征差距真的很明显啊,无论是颜色还是纹理或是边缘都差的太远了。而这这是几种情况,自然图像那么多,我们通过什么特征去区分?应该区分到什么尺度?
selective search的策略是,既然是不知道尺度是怎样的,那我们就尽可能遍历所有的尺度好了,但是不同于暴力穷举,我们可以先利用基于图的图像分割的方法得到小尺度的区域,然后一次次合并得到大的尺寸就好了,这样也符合人类的视觉认知。既然特征很多,那就把我们知道的特征都用上,但是同时也要照顾下计算复杂度,不然和穷举法也没啥区别了。最后还要做的是能够对每个区域进行排序,这样你想要多少个候选我就产生多少个,不然总是产生那么多你也用不完不是吗?
- 适应不同尺度(Capture All Scales):穷举搜索(Exhaustive Selective)通过改变窗口大小来适应物体的不同尺度,选择搜索(Selective Search)同样无法避免这个问题。算法采用了图像分割(Image Segmentation)以及使用一种层次算法(Hierarchical Algorithm)有效地解决了这个问题。
- 多样化(Diversification):单一的策略无法应对多种类别的图像。使用颜色(color)、纹理(texture)、大小(size)等多种策略对分割好的区域(region)进行合并。
- 速度快(Fast to Compute):算法,就像功夫一样,唯快不破!
一 选择性搜索的具体算法(区域合并算法)
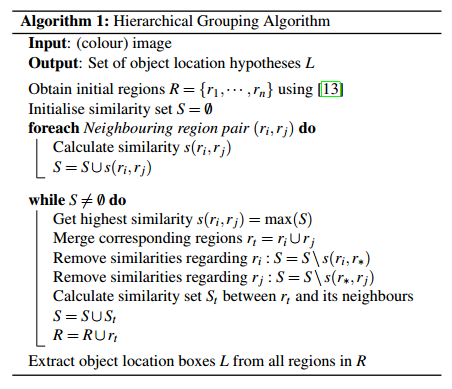
输入: 一张图片 输出:候选的目标位置集合L 算法: 1: 利用切分方法得到候选的区域集合R = {r1,r2,…,rn} 2: 初始化相似集合S = ϕ 3: foreach 遍历邻居区域对(ri,rj) do 4: 计算相似度s(ri,rj) 5: S = S ∪ s(ri,rj) 6: while S not=ϕ do 7: 从S中得到最大的相似度s(ri,rj)=max(S) 8: 合并对应的区域rt = ri ∪ rj 9: 移除ri对应的所有相似度:S = S\s(ri,r*) 10: 移除rj对应的所有相似度:S = S\s(r*,rj) 11: 计算rt对应的相似度集合St 12: S = S ∪ St 13: R = R ∪ rt 14: L = R中所有区域对应的边框
首先通过基于图的图像分割方法初始化原始区域,就是将图像分割成很多很多的小块。然后我们使用贪心策略,计算每两个相邻的区域的相似度,然后每次合并最相似的两块,直到最终只剩下一块完整的图片。然后这其中每次产生的图像块包括合并的图像块我们都保存下来,这样就得到图像的分层表示了呢。那我们如何计算两个图像块的相似度呢?
二 保持多样性的策略
区域合并采用了多样性的策略,如果简单采用一种策略很容易错误合并不相似的区域,比如只考虑纹理时,不同颜色的区域很容易被误合并。选择性搜索采用三种多样性策略来增加候选区域以保证召回:
- 多种颜色空间,考虑RGB、灰度、HSV及其变种等
- 多种相似度度量标准,既考虑颜色相似度,又考虑纹理、大小、重叠情况等。
- 通过改变阈值初始化原始区域,阈值越大,分割的区域越少。
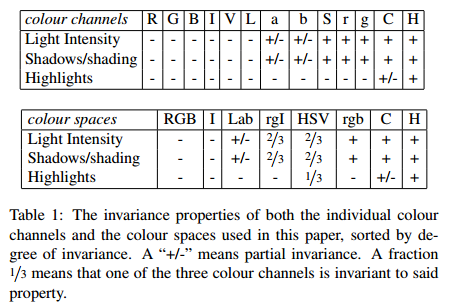
1、颜色空间变换
通过色彩空间变换,将原始色彩空间转换到多达八中的色彩空间。作者采用了8中不同的颜色方式,主要是为了考虑场景以及光照条件等。这个策略主要应用于中图像分割算法中原始区域的生成(两个像素点的相似度计算时,计算不同颜色空间下的两点距离)。主要使用的颜色空间有:(1)RGB,(2)灰度I,(3)Lab,(4)rgI(归一化的rg通道加上灰度),(5)HSV,(6)rgb(归一化的RGB),(7)C,(8)H(HSV的H通道)
2、区域相似度计算
我们在计算多种相似度的时候,都是把单一相似度的值归一化到[0,1]之间,1表示两个区域之间相似度最大。
-
颜色相似度
使用L1-norm归一化获取图像每个颜色通道的25 bins的直方图,这样每个区域都可以得到一个75维的向量![]() ,区域之间颜色相似度通过下面的公式计算:
,区域之间颜色相似度通过下面的公式计算:
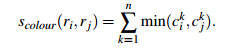
上面这个公式可能你第一眼看过去看不懂,那咱们打个比方,由于![]() 是归一化后值,每一个颜色通道的直方图累加和为1.0,三个通道的累加和就为3.0,如果区域ci和区域cj直方图完全一样,则此时颜色相似度最大为3.0,如果不一样,由于累加取两个区域bin的最小值进行累加,当直方图差距越大,累加的和就会越小,即颜色相似度越小。
是归一化后值,每一个颜色通道的直方图累加和为1.0,三个通道的累加和就为3.0,如果区域ci和区域cj直方图完全一样,则此时颜色相似度最大为3.0,如果不一样,由于累加取两个区域bin的最小值进行累加,当直方图差距越大,累加的和就会越小,即颜色相似度越小。
在区域合并过程中使用需要对新的区域进行计算其直方图,计算方法:

- 纹理相似度
这里的纹理采用SIFT-Like特征。具体做法是对每个颜色通道的8个不同方向计算方差σ=1的高斯微分(Gaussian Derivative),使用L1-norm归一化获取图像每个颜色通道的每个方向的10 bins的直方图,这样就可以获取到一个240(10x8x3)维的向量![]() ,区域之间纹理相似度计算方式和颜色相似度计算方式类似,合并之后新区域的纹理特征计算方式和颜色特征计算相同:
,区域之间纹理相似度计算方式和颜色相似度计算方式类似,合并之后新区域的纹理特征计算方式和颜色特征计算相同:
- 优先合并小的区域
如果仅仅是通过颜色和纹理特征合并的话,很容易使得合并后的区域不断吞并周围的区域,后果就是多尺度只应用在了那个局部,而不是全局的多尺度。因此我们给小的区域更多的权重,这样保证在图像每个位置都是多尺度的在合并。
上面的公式表示,两个区域越小,其相似度越大,越接近1。
- 区域的合适度距离
如果区域ri包含在rj内,我们首先应该合并,另一方面,如果ri很难与rj相接,他们之间会形成断崖,不应该合并在一块。这里定义区域的合适度距离主要是为了衡量两个区域是否更加“吻合”,其指标是合并后的区域的Bounding Box(能够框住区域的最小矩形BBij)越小,其吻合度越高,即相似度越接近1。其计算方式:

- 合并上面四种相似度

其中
三 给区域打分
通过上述的步骤我们能够得到很多很多的区域,但是显然不是每个区域作为目标的可能性都是相同的,因此我们需要衡量这个可能性,这样就可以根据我们的需要筛选区域建议个数啦。
这篇文章做法是,给予最先合并的图片块较大的权重,比如最后一块完整图像权重为1,倒数第二次合并的区域权重为2以此类推。但是当我们策略很多,多样性很多的时候呢,这个权重就会有太多的重合了,排序不好搞啊。文章做法是给他们乘以一个随机数,毕竟3分看运气嘛,然后对于相同的区域多次出现的也叠加下权重,毕竟多个方法都说你是目标,也是有理由的嘛。这样我就得到了所有区域的目标分数,也就可以根据自己的需要选择需要多少个区域了。
四 选择性搜索性能评估
自然地,通过算法计算得到的包含物体的Bounding Boxes与真实情况(ground truth)的窗口重叠越多,那么算法性能就越好。这是使用的指标是平均最高重叠率ABO(Average Best Overlap)。对于每个固定的类别 c,每个真实情况(ground truth)表示为  ,令计算得到的位置假设L中的每个值lj,那么 ABO的公式表达为:
,令计算得到的位置假设L中的每个值lj,那么 ABO的公式表达为:


1、单一策略评估
- 使用RGB色彩空间(基于图的图像分割会利用不同的色彩进行图像区域分割)
- 采用四种相似度计算的组合方式
- 设置图像分割的阈值k=50
然后通过改变其中一个策略参数,获取MABO性能指标如下表(第一列为改变的参数,第二列为MABO值,第三列为获取的候选区的个数):
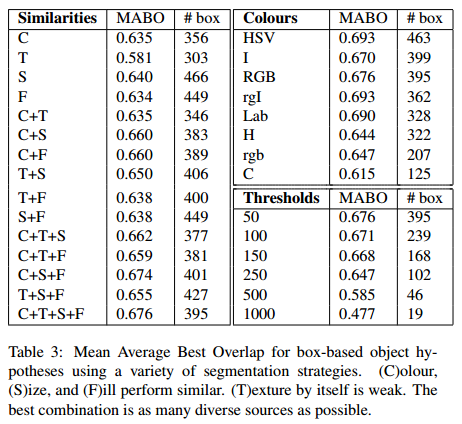
表中左侧为不同的相似度组合,单独的,我们可以看到纹理相似度表现最差,MABO为0.581,其他的MABO值介于0.63和0.64之间。当使用多种相似度组合时MABO性能优于单种相似度。表的右上角表名使用HSV颜色空间,有463个候选区域,而且MABO值最大为0.693。表的右下角表名使用较小的阈值,会得到更多的候选区和较高的MABO值。
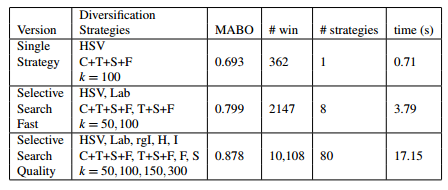
2、多样性策略组合
我们使用贪婪的搜索算法,把单一策略进行组合,会获得较高的MABO,但是也会造成计算成本的增加。下表给出了三种组合的MABO性能指标:

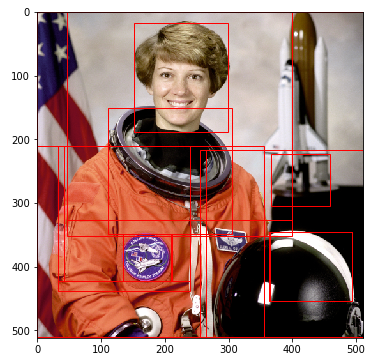
上图中的绿色边框为对象的标记边框,红色边框为我们使用 'Quality' Selective Search算法获得的Overlap最高的候选框。可以看到我们这个候选框和真实标记非常接近。
下表为和其它算法在VOC 2007测试集上的比较结果:
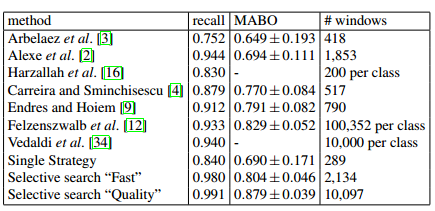
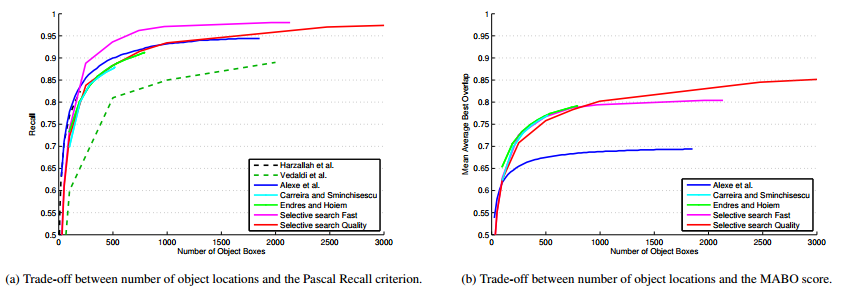
下图为各个算法在选取不同候选区数量,Recall和MABO性能的曲线图,从计算成本、以及性能考虑,Selective Search Fast算法在2000个候选区时,效果较好。
五、代码实现
我们可以通过下面命令直接安装Selective Search包。
pip install selectivesearch
然后从https://github.com/AlpacaDB/selectivesearch下载源码,运行example\example.py文件。效果如下:
# -*- coding: utf-8 -*- from __future__ import ( division, print_function, ) import skimage.data import matplotlib.pyplot as plt import matplotlib.patches as mpatches import selectivesearch import numpy as np def main(): # 加载图片数据 img = skimage.data.astronaut() ''' 执行selective search,regions格式如下 [ { 'rect': (left, top, width, height), 'labels': [...], 'size': component_size }, ... ] ''' img_lbl, regions = selectivesearch.selective_search( img, scale=500, sigma=0.9, min_size=10) #计算一共分割了多少个原始候选区域 temp = set() for i in range(img_lbl.shape[0]): for j in range(img_lbl.shape[1]): temp.add(img_lbl[i,j,3]) print(len(temp)) #286 #计算利用Selective Search算法得到了多少个候选区域 print(len(regions)) #570 #创建一个集合 元素不会重复,每一个元素都是一个list(左上角x,左上角y,宽,高),表示一个候选区域的边框 candidates = set() for r in regions: #排除重复的候选区 if r['rect'] in candidates: continue #排除小于 2000 pixels的候选区域(并不是bounding box中的区域大小) if r['size'] < 2000: continue #排除扭曲的候选区域边框 即只保留近似正方形的 x, y, w, h = r['rect'] if w / h > 1.2 or h / w > 1.2: continue candidates.add(r['rect']) #在原始图像上绘制候选区域边框 fig, ax = plt.subplots(ncols=1, nrows=1, figsize=(6, 6)) ax.imshow(img) for x, y, w, h in candidates: print(x, y, w, h) rect = mpatches.Rectangle( (x, y), w, h, fill=False, edgecolor='red', linewidth=1) ax.add_patch(rect) plt.show() if __name__ == "__main__": main()
selective_search函数的定义如下:
def selective_search( im_orig, scale=1.0, sigma=0.8, min_size=50): '''Selective Search 首先通过基于图的图像分割方法初始化原始区域,就是将图像分割成很多很多的小块 然后我们使用贪心策略,计算每两个相邻的区域的相似度 然后每次合并最相似的两块,直到最终只剩下一块完整的图片 然后这其中每次产生的图像块包括合并的图像块我们都保存下来 Parameters ---------- im_orig : ndarray Input image scale : int Free parameter. Higher means larger clusters in felzenszwalb segmentation. sigma : float Width of Gaussian kernel for felzenszwalb segmentation. min_size : int Minimum component size for felzenszwalb segmentation. Returns ------- img : ndarray image with region label region label is stored in the 4th value of each pixel [r,g,b,(region)] regions : array of dict [ { 'rect': (left, top, width, height), 'labels': [...], 'size': component_size 候选区域大小,并不是边框的大小 }, ... ] ''' assert im_orig.shape[2] == 3, "3ch image is expected" # load image and get smallest regions # region label is stored in the 4th value of each pixel [r,g,b,(region)] #图片分割 把候选区域标签合并到最后一个通道上 height x width x 4 每一个像素的值为[r,g,b,(region)] img = _generate_segments(im_orig, scale, sigma, min_size) if img is None: return None, {} #计算图像大小 imsize = img.shape[0] * img.shape[1] #dict类型,键值为候选区域的标签 值为候选区域的信息,包括候选区域的边框,以及区域的大小,颜色直方图,纹理特征直方图等信息 R = _extract_regions(img) #list类型 每一个元素都是邻居候选区域对(ri,rj) (即两两相交的候选区域) neighbours = _extract_neighbours(R) # calculate initial similarities 初始化相似集合S = ϕ S = {} #计算每一个邻居候选区域对的相似度s(ri,rj) for (ai, ar), (bi, br) in neighbours: #S=S∪s(ri,rj) ai表示候选区域ar的标签 比如当ai=1 bi=2 S[(1,2)就表示候选区域1和候选区域2的相似度 S[(ai, bi)] = _calc_sim(ar, br, imsize) # hierarchal search 层次搜索 直至相似度集合为空 while S != {}: # get highest similarity 获取相似度最高的两个候选区域 i,j表示候选区域标签 i, j = sorted(S.items(), key=lambda i: i[1])[-1][0] #按照相似度排序 # merge corresponding regions 合并相似度最高的两个邻居候选区域 rt = ri∪rj ,R = R∪rt t = max(R.keys()) + 1.0 R[t] = _merge_regions(R[i], R[j]) # mark similarities for regions to be removed 获取需要删除的元素的键值 key_to_delete = [] for k, v in S.items(): #k表示邻居候选区域对(i,j) v表示候选区域(i,j)表示相似度 if (i in k) or (j in k): key_to_delete.append(k) # remove old similarities of related regions 移除候选区域ri对应的所有相似度:S = S\s(ri,r*) 移除候选区域rj对应的所有相似度:S = S\s(r*,rj) for k in key_to_delete: del S[k] # calculate similarity set with the new region 计算候选区域rt对应的相似度集合St,S = S∪St for k in filter(lambda a: a != (i, j), key_to_delete): n = k[1] if k[0] in (i, j) else k[0] S[(t, n)] = _calc_sim(R[t], R[n], imsize) #获取每一个候选区域的的信息 边框、以及候选区域size,标签 regions = [] for k, r in R.items(): regions.append({ 'rect': ( r['min_x'], r['min_y'], r['max_x'] - r['min_x'], r['max_y'] - r['min_y']), 'size': r['size'], 'labels': r['labels'] }) #img:基于图的图像分割得到的候选区域 regions:Selective Search算法得到的候选区域 return img, regions
该函数是按照Selective Search算法实现的,算法的每一步都有相对应的代码,并且把初始化候选区域,邻居候选区域对的遍历以及相似度计算,候选区域的合并都单独封装成了一个函数,由于代码比较长,就不一一介绍了,下面我把代码附上,并且做了详细的介绍,有兴趣研究的童鞋看一下:


# -*- coding: utf-8 -*- import skimage.io import skimage.feature import skimage.color import skimage.transform import skimage.util import skimage.segmentation import numpy # "Selective Search for Object Recognition" by J.R.R. Uijlings et al. # # - Modified version with LBP extractor for texture vectorization def _generate_segments(im_orig, scale, sigma, min_size): """ segment smallest regions by the algorithm of Felzenswalb and Huttenlocher """ # open the Image segment_mask : (width, height) ndarray Integer mask indicating segment labels. im_mask = skimage.segmentation.felzenszwalb( skimage.util.img_as_float(im_orig), scale=scale, sigma=sigma, min_size=min_size) # merge mask channel to the image as a 4th channel 把类别合并到最后一个通道上 height x width x 4 im_orig = numpy.append( im_orig, numpy.zeros(im_orig.shape[:2])[:, :, numpy.newaxis], axis=2) im_orig[:, :, 3] = im_mask return im_orig def _sim_colour(r1, r2): """ 计算颜色相似度 calculate the sum of histogram intersection of colour args: r1:候选区域r1 r2:候选区域r2 return:[0,3]之间的数值 """ return sum([min(a, b) for a, b in zip(r1["hist_c"], r2["hist_c"])]) def _sim_texture(r1, r2): """ 计算纹理特征相似度 calculate the sum of histogram intersection of texture args: r1:候选区域r1 r2:候选区域r2 return:[0,3]之间的数值 """ return sum([min(a, b) for a, b in zip(r1["hist_t"], r2["hist_t"])]) def _sim_size(r1, r2, imsize): """ 计算候选区域大小相似度 calculate the size similarity over the image args: r1:候选区域r1 r2:候选区域r2 return:[0,1]之间的数值 """ return 1.0 - (r1["size"] + r2["size"]) / imsize def _sim_fill(r1, r2, imsize): """ 计算候选区域的距离合适度相似度 calculate the fill similarity over the image args: r1:候选区域r1 r2:候选区域r2 imsize:原图像像素数 return:[0,1]之间的数值 """ bbsize = ( (max(r1["max_x"], r2["max_x"]) - min(r1["min_x"], r2["min_x"])) * (max(r1["max_y"], r2["max_y"]) - min(r1["min_y"], r2["min_y"])) ) return 1.0 - (bbsize - r1["size"] - r2["size"]) / imsize def _calc_sim(r1, r2, imsize): ''' 计算两个候选区域的相似度,权重系数默认都是1 args: r1:候选区域r1 r2:候选区域r2 imsize:原图片像素数 ''' return (_sim_colour(r1, r2) + _sim_texture(r1, r2) + _sim_size(r1, r2, imsize) + _sim_fill(r1, r2, imsize)) def _calc_colour_hist(img): """ 使用L1-norm归一化获取图像每个颜色通道的25 bins的直方图,这样每个区域都可以得到一个75维的向量 calculate colour histogram for each region the size of output histogram will be BINS * COLOUR_CHANNELS(3) number of bins is 25 as same as [uijlings_ijcv2013_draft.pdf] extract HSV args: img:ndarray类型, 形状为候选区域像素数 x 3(h,s,v) return:一维的ndarray类型,长度为75 """ BINS = 25 hist = numpy.array([]) for colour_channel in (0, 1, 2): # extracting one colour channel c = img[:, colour_channel] # calculate histogram for each colour and join to the result #计算每一个颜色通道的25 bins的直方图 然后合并到一个一维数组中 hist = numpy.concatenate( [hist] + [numpy.histogram(c, BINS, (0.0, 255.0))[0]]) # L1 normalize len(img):候选区域像素数 hist = hist / len(img) return hist def _calc_texture_gradient(img): """ 原文:对每个颜色通道的8个不同方向计算方差σ=1的高斯微分(Gaussian Derivative,这里使用LBP替代 calculate texture gradient for entire image The original SelectiveSearch algorithm proposed Gaussian derivative for 8 orientations, but we use LBP instead. output will be [height(*)][width(*)] args: img: ndarray类型,形状为height x width x 4,每一个像素的值为 [r,g,b,(region)] return:纹理特征,形状为height x width x 4 """ ret = numpy.zeros((img.shape[0], img.shape[1], img.shape[2])) for colour_channel in (0, 1, 2): ret[:, :, colour_channel] = skimage.feature.local_binary_pattern( img[:, :, colour_channel], 8, 1.0) return ret def _calc_texture_hist(img): """ 使用L1-norm归一化获取图像每个颜色通道的每个方向的10 bins的直方图,这样就可以获取到一个240(10x8x3)维的向量 calculate texture histogram for each region calculate the histogram of gradient for each colours the size of output histogram will be BINS * ORIENTATIONS * COLOUR_CHANNELS(3) args: img:候选区域纹理特征 形状为候选区域像素数 x 4(r,g,b,(region)) return:一维的ndarray类型,长度为240 """ BINS = 10 hist = numpy.array([]) for colour_channel in (0, 1, 2): # mask by the colour channel fd = img[:, colour_channel] # calculate histogram for each orientation and concatenate them all # and join to the result hist = numpy.concatenate( [hist] + [numpy.histogram(fd, BINS, (0.0, 1.0))[0]]) # L1 Normalize len(img):候选区域像素数 hist = hist / len(img) return hist def _extract_regions(img): ''' 提取每一个候选区域的信息 比如类别(region)为5的区域表示的是一只猫的选区,这里就是提取这只猫的边界框,左上角后右下角坐标 args: img: ndarray类型,形状为height x width x 4,每一个像素的值为 [r,g,b,(region)] return : R:dict 每一个元素对应一个候选区域, 每个元素也是一个dict类型 {min_x:边界框的左上角x坐标, min_y:边界框的左上角y坐标, max_x:边界框的右下角x坐标, max_y:边界框的右下角y坐标, size:像素个数, hist_c:颜色的直方图, hist_t:纹理特征的直方图,} ''' #保存所有候选区域的bounding box 每一个元素都是一个dict {最小x坐标值,最小y坐标值,最大x坐标值,最大y坐标值,类别} # 通过上面四个参数确定一个边界框 R = {} # get hsv image RGB转换为HSV色彩空间 height x width x 3 hsv = skimage.color.rgb2hsv(img[:, :, :3]) # pass 1: count pixel positions 遍历每一个像素 for y, i in enumerate(img): #y = 0 -> height - 1 for x, (r, g, b, l) in enumerate(i): # x = 0 -> height - 1 # initialize a new region if l not in R: R[l] = { "min_x": 0xffff, "min_y": 0xffff, "max_x": 0, "max_y": 0, "labels": [l]} # bounding box if R[l]["min_x"] > x: R[l]["min_x"] = x if R[l]["min_y"] > y: R[l]["min_y"] = y if R[l]["max_x"] < x: R[l]["max_x"] = x if R[l]["max_y"] < y: R[l]["max_y"] = y # pass 2: calculate texture gradient 纹理特征提取 利用LBP算子 height x width x 4 tex_grad = _calc_texture_gradient(img) # pass 3: calculate colour histogram of each region 计算每一个候选区域(注意不是bounding box圈住的区域)的直方图 for k, v in R.items(): # colour histogram height x width x 3 -> 候选区域k像素数 x 3(img[:, :, 3] == k返回的是一个二维坐标的集合) masked_pixels = hsv[:, :, :][img[:, :, 3] == k] #print(type(masked_pixels),masked_pixels.shape) R[k]["size"] = len(masked_pixels / 4) #候选区域k像素数 #在hsv色彩空间下,使用L1-norm归一化获取图像每个颜色通道的25 bins的直方图,这样每个区域都可以得到一个75维的向量 R[k]["hist_c"] = _calc_colour_hist(masked_pixels) #在rgb色彩空间下,使用L1-norm归一化获取图像每个颜色通道的每个方向的10 bins的直方图,这样就可以获取到一个240(10x8x3)维的向量 R[k]["hist_t"] = _calc_texture_hist(tex_grad[:, :][img[:, :, 3] == k]) #tex_grad[:, :][img[:, :, 3] == k]形状为候选区域像素数 x 4 return R def _extract_neighbours(regions): ''' 提取 邻居候选区域对(ri,rj)(即两两相交) args: regions:dict 每一个元素都对应一个候选区域 return: 返回一个list,每一个元素都对应一个邻居候选区域对 ''' #判断两个候选区域是否相交 def intersect(a, b): if (a["min_x"] < b["min_x"] < a["max_x"] and a["min_y"] < b["min_y"] < a["max_y"]) or ( a["min_x"] < b["max_x"] < a["max_x"] and a["min_y"] < b["max_y"] < a["max_y"]) or ( a["min_x"] < b["min_x"] < a["max_x"] and a["min_y"] < b["max_y"] < a["max_y"]) or ( a["min_x"] < b["max_x"] < a["max_x"] and a["min_y"] < b["min_y"] < a["max_y"]): return True return False #转换为list 每一个元素 (l,regions[l]) R = list(regions.items()) #保存两两相交候选区域对 neighbours = [] #每次抽取两个候选区域 两两组合,判断是否相交 for cur, a in enumerate(R[:-1]): for b in R[cur + 1:]: if intersect(a[1], b[1]): neighbours.append((a, b)) return neighbours def _merge_regions(r1, r2): ''' 合并两个候选区域 args: r1:候选区域1 r2:候选区域2 return: 返回合并后的候选区域rt ''' new_size = r1["size"] + r2["size"] rt = { "min_x": min(r1["min_x"], r2["min_x"]), "min_y": min(r1["min_y"], r2["min_y"]), "max_x": max(r1["max_x"], r2["max_x"]), "max_y": max(r1["max_y"], r2["max_y"]), "size": new_size, "hist_c": ( r1["hist_c"] * r1["size"] + r2["hist_c"] * r2["size"]) / new_size, "hist_t": ( r1["hist_t"] * r1["size"] + r2["hist_t"] * r2["size"]) / new_size, "labels": r1["labels"] + r2["labels"] } return rt def selective_search( im_orig, scale=1.0, sigma=0.8, min_size=50): '''Selective Search 首先通过基于图的图像分割方法初始化原始区域,就是将图像分割成很多很多的小块 然后我们使用贪心策略,计算每两个相邻的区域的相似度 然后每次合并最相似的两块,直到最终只剩下一块完整的图片 然后这其中每次产生的图像块包括合并的图像块我们都保存下来 Parameters ---------- im_orig : ndarray Input image scale : int Free parameter. Higher means larger clusters in felzenszwalb segmentation. sigma : float Width of Gaussian kernel for felzenszwalb segmentation. min_size : int Minimum component size for felzenszwalb segmentation. Returns ------- img : ndarray image with region label region label is stored in the 4th value of each pixel [r,g,b,(region)] regions : array of dict [ { 'rect': (left, top, width, height), 'labels': [...], 'size': component_size 候选区域大小,并不是边框的大小 }, ... ] ''' assert im_orig.shape[2] == 3, "3ch image is expected" # load image and get smallest regions # region label is stored in the 4th value of each pixel [r,g,b,(region)] #图片分割 把候选区域标签合并到最后一个通道上 height x width x 4 每一个像素的值为[r,g,b,(region)] img = _generate_segments(im_orig, scale, sigma, min_size) if img is None: return None, {} #计算图像大小 imsize = img.shape[0] * img.shape[1] #dict类型,键值为候选区域的标签 值为候选区域的信息,包括候选区域的边框,以及区域的大小,颜色直方图,纹理特征直方图等信息 R = _extract_regions(img) #list类型 每一个元素都是邻居候选区域对(ri,rj) (即两两相交的候选区域) neighbours = _extract_neighbours(R) # calculate initial similarities 初始化相似集合S = ϕ S = {} #计算每一个邻居候选区域对的相似度s(ri,rj) for (ai, ar), (bi, br) in neighbours: #S=S∪s(ri,rj) ai表示候选区域ar的标签 比如当ai=1 bi=2 S[(1,2)就表示候选区域1和候选区域2的相似度 S[(ai, bi)] = _calc_sim(ar, br, imsize) # hierarchal search 层次搜索 直至相似度集合为空 while S != {}: # get highest similarity 获取相似度最高的两个候选区域 i,j表示候选区域标签 i, j = sorted(S.items(), key=lambda i: i[1])[-1][0] #按照相似度排序 # merge corresponding regions 合并相似度最高的两个邻居候选区域 rt = ri∪rj ,R = R∪rt t = max(R.keys()) + 1.0 R[t] = _merge_regions(R[i], R[j]) # mark similarities for regions to be removed 获取需要删除的元素的键值 key_to_delete = [] for k, v in S.items(): #k表示邻居候选区域对(i,j) v表示候选区域(i,j)表示相似度 if (i in k) or (j in k): key_to_delete.append(k) # remove old similarities of related regions 移除候选区域ri对应的所有相似度:S = S\s(ri,r*) 移除候选区域rj对应的所有相似度:S = S\s(r*,rj) for k in key_to_delete: del S[k] # calculate similarity set with the new region 计算新的候选区域rt对应的相似度集合St,S = S∪St for k in filter(lambda a: a != (i, j), key_to_delete): #过滤除了(i,j)之外的候选区域 n = k[1] if k[0] in (i, j) else k[0] #计算新的候选区域t与候选区域n之间的相似度 S[(t, n)] = _calc_sim(R[t], R[n], imsize) #获取每一个候选区域的的信息 边框、以及候选区域size,标签 regions = [] for k, r in R.items(): regions.append({ 'rect': ( r['min_x'], r['min_y'], r['max_x'] - r['min_x'], r['max_y'] - r['min_y']), 'size': r['size'], 'labels': r['labels'] }) #img:ndarray 基于图的图像分割得到的候选区域 regions:list Selective Search算法得到的候选区域 return img, regions
参考文章:
[1]图像分割—基于图的图像分割(Graph-Based Image Segmentation)(附代码)
[3]https://github.com/AlpacaDB/selectivesearch(代码)
[4]Selective Search for Object Recognition(推荐)
[7]C++简版代码

 浙公网安备 33010602011771号
浙公网安备 33010602011771号