
随笔分类 - ROS学习
摘要: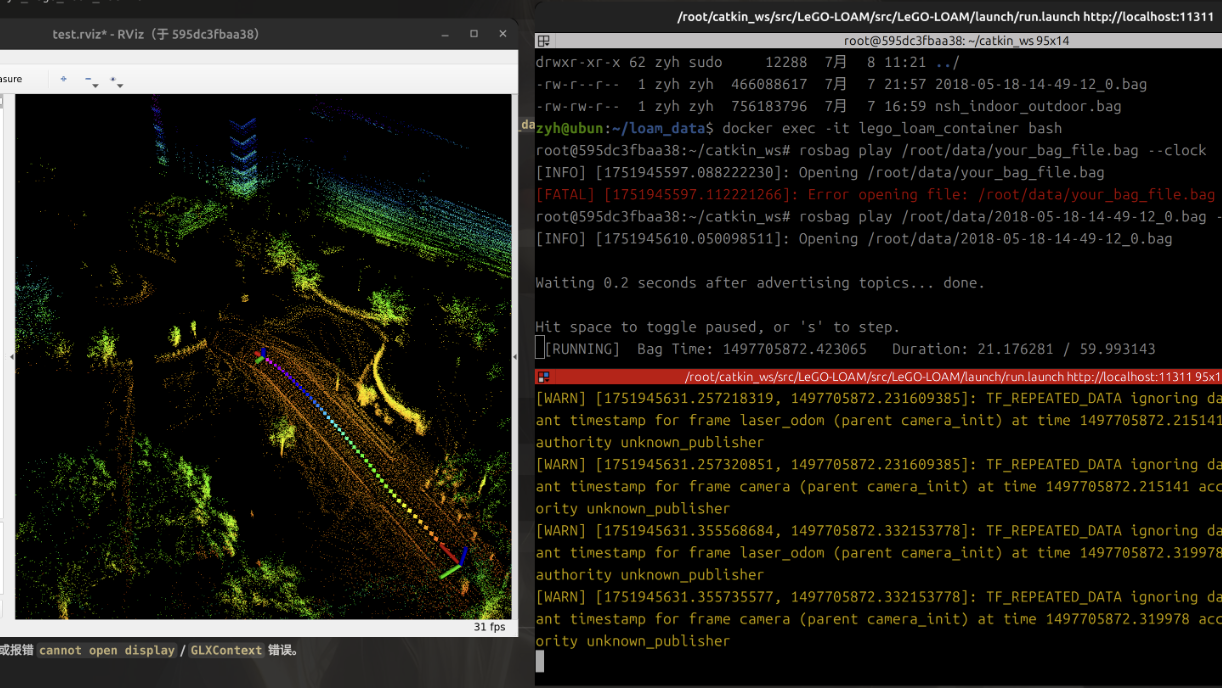 LeGO-LOAM Docker for ROS Noetic 这是一个为 LeGO-LOAM 准备的、开箱即用的 Docker 环境。 该镜像基于 ROS Noetic (Ubuntu 20.04),并包含了所有运行 LeGO-LOAM 所需的核心依赖和图形库,让你无需经历繁琐的环境配置,即可快速
阅读全文
LeGO-LOAM Docker for ROS Noetic 这是一个为 LeGO-LOAM 准备的、开箱即用的 Docker 环境。 该镜像基于 ROS Noetic (Ubuntu 20.04),并包含了所有运行 LeGO-LOAM 所需的核心依赖和图形库,让你无需经历繁琐的环境配置,即可快速
阅读全文
LeGO-LOAM Docker for ROS Noetic 这是一个为 LeGO-LOAM 准备的、开箱即用的 Docker 环境。 该镜像基于 ROS Noetic (Ubuntu 20.04),并包含了所有运行 LeGO-LOAM 所需的核心依赖和图形库,让你无需经历繁琐的环境配置,即可快速
阅读全文
摘要:Topic 话题📡 与 Message 消息📨 在ROS(Robot Operating System)中,由于其分布式模块化的设计理念,一个完整的机器人任务会被分解成多个节点(Node)来实现。 这些节点之间需要协作,而最常用的通信方式就是通过话题(Topic)和消息(Message)。 🎮
阅读全文
摘要:第一个note节点🎉 【11.初学ROS,年轻人的第一个Node节点】 创建package软件包📦 cd catkin_ws/src catkin_create_pkg ssr_pkg rospy ropcpp std_msgs 输出内容 前两个是文件,后两个是目录 什么是依赖项? 在管理节点时
阅读全文
摘要:ROS的基础单元:Node节点和Package包📦 10. ROS 的基础单元:Node 节点和 Package 包 Node🧩 与 Package📦 1. Node 节点 ROS和安卓有很多相似之处, 在安卓中,打电话是一个 app 📞,玩游戏是一个 app 🎮。 在 ROS 中,建图是
阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号