
PWM输出
1、ARR确定脉冲的周期;
2、void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2)函数设置捕获比较2寄存器值,决定占空比;
3、PWM输出初始化函数:
a、输出端定义(可利用端子重映射灵活选择脉冲输出端子),
b、定时器初始化(设定分频和ARR值确定脉冲频率),
c、输出比较通道初始化:选择PWM模式,极性
1 void TIM3_PWM_Init(u16 arr,u16 psc) 2 { 3 GPIO_InitTypeDef GPIO_InitStructure; 4 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; 5 TIM_OCInitTypeDef TIM_OCInitStructure; 6 7 8 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟 9 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟 10 11 GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5 12 13 //设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5 14 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2 15 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 16 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 17 GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO 18 19 //初始化TIM3 20 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 21 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 22 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim 23 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 24 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 25 26 //初始化TIM3 Channel2 PWM模式 27 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2 28 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能 29 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高 30 TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2 31 32 TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器 33 34 TIM_Cmd(TIM3, ENABLE); //使能TIM3 36 37 }
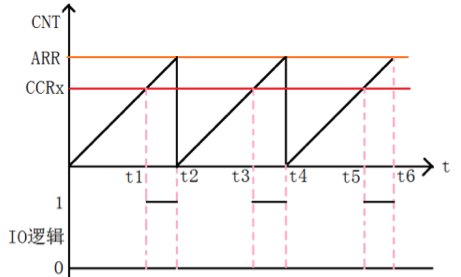
●PWM模式1
在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为有效电平,否则为无效 电平。
在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为无效电平,否则为有效 电平。
●PWM模式2
在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为无效电平,否则为有效 电平。
在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平,否则为无效 电平。
●STM32 的定时器除了 TIM6 和 7。其他的定时器都可以用来产生 PWM 输出。
●配置PWM模块的功能,具体有:
①:设置PWM定时器周期,该参数决定PWM波形的频率。
②:设置PWM定时器比较值,该参数决定PWM波形的占空比。
③:设置死区(deadband),为避免桥臂的直通需要设置死区。
④:设置故障处理情况,一般为故障是封锁输出,防止过流损坏功率管,故障一般有比较器或ADC或GPIO检测。
⑤:设定同步功能,该功能在多桥臂,即多PWM模块协调工作时尤为重要。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号