均值高斯低通滤波的算法实现
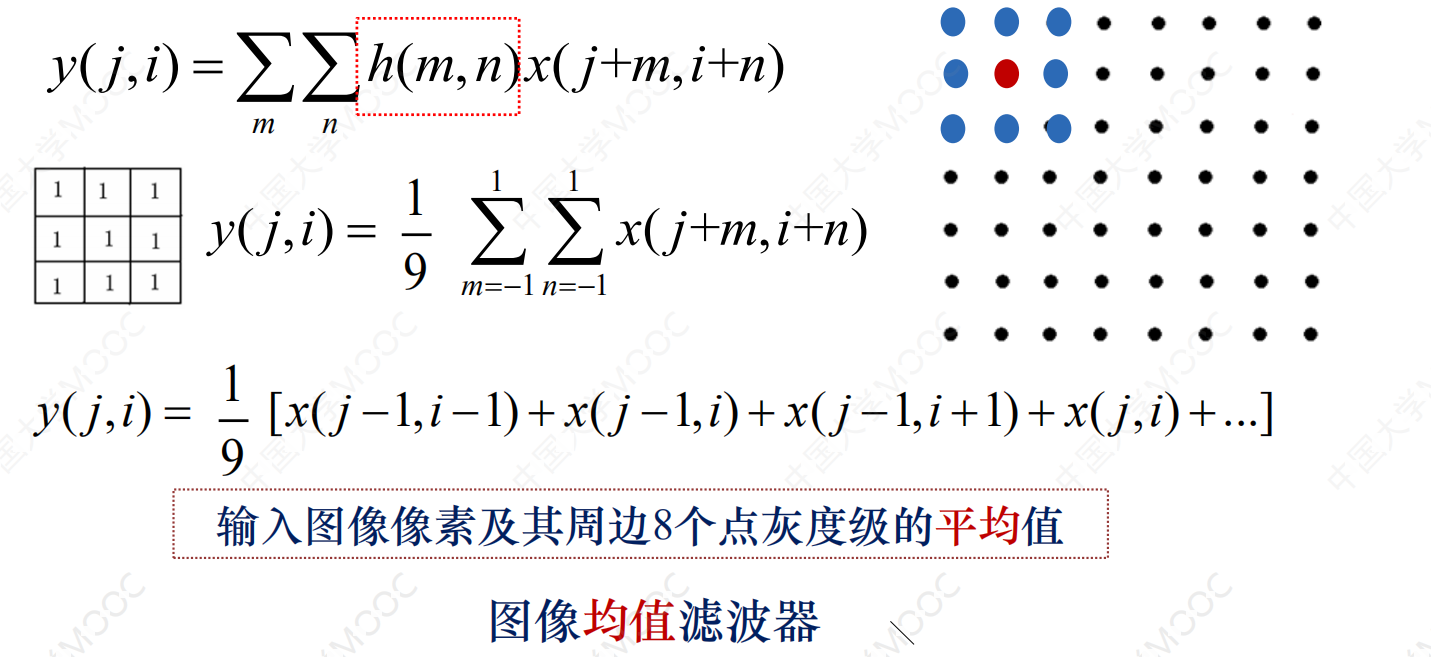
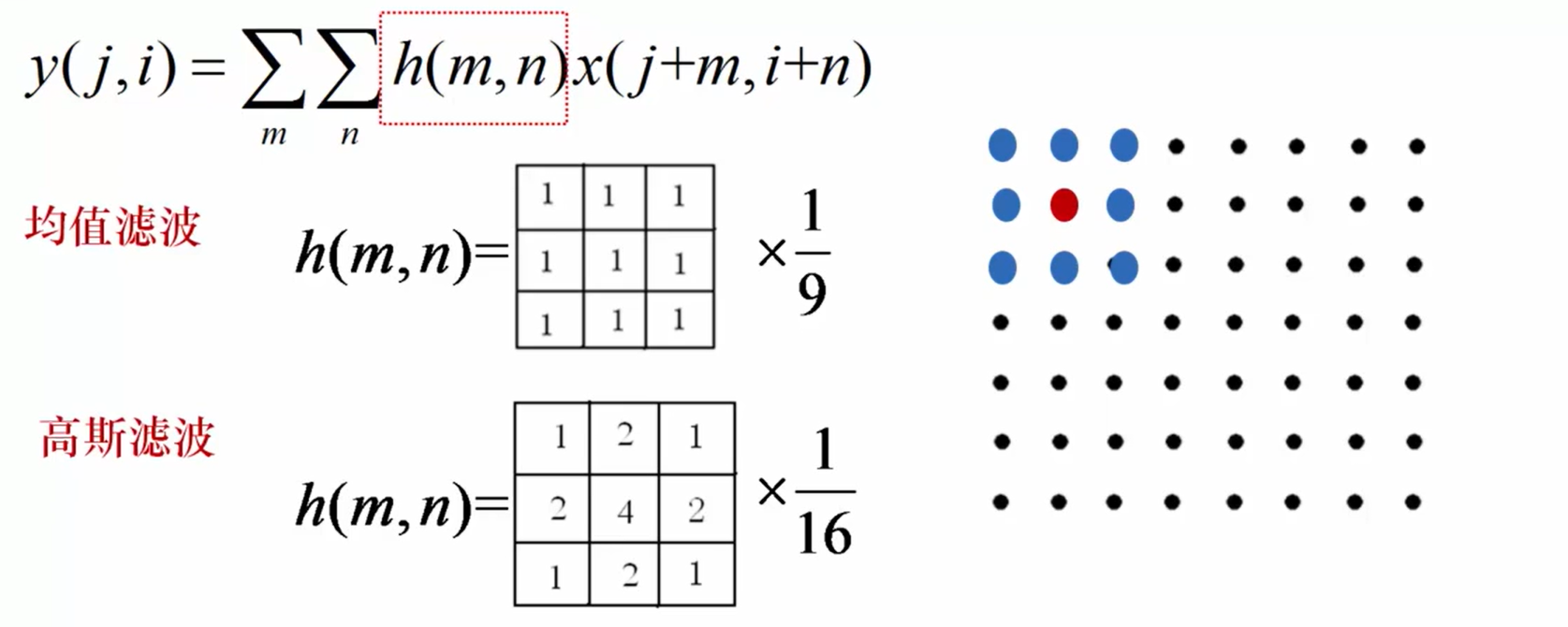
线性滤波可以说是图像处理最基本的方法,它可以允许我们对图像进行处理,产生很多不同的效果。做法很简单。首先,我们有一个二维的滤波器矩阵(有个高大上的名字叫卷积核)和一个要处理的二维图像。然后,对于图像的每一个像素点,计算它的邻域像素和滤波器矩阵的对应元素的乘积,然后加起来,作为该像素位置的值。这样就完成了滤波过程。上图中的h(m,n)就是二维滤波器矩阵,也叫做卷积核,(i,j)表示图像的空间位置。
【转】图像处理算法其实都很简单
using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Drawing.Imaging; using System.IO; using System.Linq; using System.Runtime.InteropServices; using System.Text; using System.Windows.Forms; namespace ImageProcessingPlatform { public partial class FrmMain : Form { byte[] SourceImage; int width; int height; public FrmMain() { InitializeComponent(); } private void FrmMain_Load(object sender, EventArgs e) { Bitmap bmp = new Bitmap("E:\\过程3\\0.bmp"); width = bmp.Width; height = bmp.Height; SourceImage = getByteStreamFromBitmap(width, height,1, bmp); this.pb_SourceImage.Image = bmp; } /// <summary> /// 将Bitmap转换为字节数组 /// </summary> /// <param name="width"></param> /// <param name="height"></param> /// <param name="channel"></param> /// <param name="img"></param> /// <returns></returns> public static byte[] getByteStreamFromBitmap(int width, int height, int channel, Bitmap img) { byte[] bytes = new byte[width * height * channel]; BitmapData im = img.LockBits(new Rectangle(0, 0, width, height), ImageLockMode.WriteOnly, img.PixelFormat); int stride = im.Stride; int offset = stride - width * channel; int length = stride * height; byte[] temp = new byte[stride * height]; Marshal.Copy(im.Scan0, temp, 0, temp.Length); img.UnlockBits(im); int posreal = 0; int posscan = 0; for (int c = 0; c < height; c++) { for (int d = 0; d < width * channel; d++) { bytes[posreal++] = temp[posscan++]; } posscan += offset; } return bytes; } /// <summary> /// 将一个字节数组转换为8bit灰度位图 /// </summary> /// <param name="rawValues">显示字节数组</param> /// <param name="width">图像宽度</param> /// <param name="height">图像高度</param> /// <returns>位图</returns> public static Bitmap ToGrayBitmap(byte[] rawValues, int width, int height) { //申请目标位图的变量,并将其内存区域锁定 Bitmap bmp = new Bitmap(width, height, PixelFormat.Format8bppIndexed); BitmapData bmpData = bmp.LockBits(new Rectangle(0, 0, width, height), ImageLockMode.WriteOnly, PixelFormat.Format8bppIndexed); //获取图像参数 int stride = bmpData.Stride; // 扫描线的宽度 int offset = stride - width; // 显示宽度与扫描线宽度的间隙 IntPtr iptr = bmpData.Scan0; // 获取bmpData的内存起始位置 int scanBytes = stride * height;// 用stride宽度,表示这是内存区域的大小 //下面把原始的显示大小字节数组转换为内存中实际存放的字节数组 int posScan = 0, posReal = 0;// 分别设置两个位置指针,指向源数组和目标数组 byte[] pixelValues = new byte[scanBytes]; //为目标数组分配内存 for (int x = 0; x < height; x++) { //下面的循环节是模拟行扫描 for (int y = 0; y < width; y++) { pixelValues[posScan++] = rawValues[posReal++]; } posScan += offset; //行扫描结束,要将目标位置指针移过那段“间隙” } //用Marshal的Copy方法,将刚才得到的内存字节数组复制到BitmapData中 System.Runtime.InteropServices.Marshal.Copy(pixelValues, 0, iptr, scanBytes); bmp.UnlockBits(bmpData); // 解锁内存区域 //下面的代码是为了修改生成位图的索引表,从伪彩修改为灰度 ColorPalette tempPalette; using (Bitmap tempBmp = new Bitmap(1, 1, PixelFormat.Format8bppIndexed)) { tempPalette = tempBmp.Palette; } for (int i = 0; i < 256; i++) { tempPalette.Entries[i] = Color.FromArgb(i, i, i); } bmp.Palette = tempPalette; //算法到此结束,返回结果 return bmp; } //均值滤波 private void button1_Click(object sender, EventArgs e) { byte[] OutImage = meanFilter(SourceImage, width, height); this.BeginInvoke(new Action(()=> { this.pb_ResultImage.Image = ToGrayBitmap(OutImage, width, height); })); } //高斯滤波 private void button2_Click(object sender, EventArgs e) { byte[] OutImage = GaussFilter(SourceImage, width, height); this.BeginInvoke(new Action(() => { this.pb_ResultImage.Image = ToGrayBitmap(OutImage, width, height); })); } #region 高斯滤波 private byte[] GaussFilter(byte[] SourceImage, int width, int height) { byte[] OutImage = new byte[width * height]; //中心点的3*3邻域 byte[] block = new byte[9]; int[] smth = new int[9]; int value; smth[0] = 1; smth[1] = 2; smth[2] = 1; smth[3] = 2; smth[4] = 4; smth[5] = 2; smth[6] = 1; smth[7] = 2; smth[8] = 1; for (int row = 0; row < height; row++) { for (int column = 0; column < width; column++) { if (row == 0 || column == 0 || row == height - 1 || column == width - 1) { OutImage[row * width + column] = 0; } else { //中心点的3*3领域 for (int m = -1; m < 2; m++) { for (int n = -1; n < 2; n++) { block[(m + 1) * 3 + n + 1] = SourceImage[(row + m) * width + column + n]; } } value = GaussConvolution(smth, block); OutImage[row * width + column] = (byte)(value / 16); } } } return OutImage; } //高斯滤波卷积过程 private int GaussConvolution(int[] smth, byte[] block) { int value = 0; for (int i = 0; i < 3; i++) { for (int j = 0; j < 3; j++) { value += smth[i * 3 + j] * block[i * 3 + j]; } } return value; } #endregion #region 均值滤波 private byte[] meanFilter(byte[] SourceImage, int width, int height) { byte[] OutImage = new byte[width * height]; //中心点的3*3邻域 byte[] block = new byte[9]; int[] smth = new int[9]; int value; for (int k = 0; k < 9; k++) { smth[k] = 1; } for (int row = 0; row < height; row++) { for (int column = 0; column < width; column++) { if (row == 0 || column == 0 || row == height - 1 || column == width - 1) { OutImage[row * width + column] = 0; } else { //中心点的3*3领域 for (int m = -1; m < 2; m++) { for (int n = -1; n < 2; n++) { block[(m + 1) * 3 + n + 1] = SourceImage[(row + m) * width + column + n]; } } value = MeanConvolution(smth, block); OutImage[row * width + column] = (byte)(value / 9); } } } return OutImage; } //均值滤波卷积过程 private int MeanConvolution(int[] smth, byte[] block) { int value = 0; for (int i = 0; i < 3; i++) { for (int j = 0; j < 3; j++) { value += smth[i * 3 + j] * block[i * 3 + j]; } } return value; } #endregion } }
4556

 浙公网安备 33010602011771号
浙公网安备 33010602011771号