底盘运动学
参考 https://blog.csdn.net/qq_24706659/article/details/88342626
四轮阿克曼底盘(Four-wheeled Ackerman robot)
1.上层运动学分析
像汽车一样,前轮转向,后轮驱动的模型就叫阿克曼模型
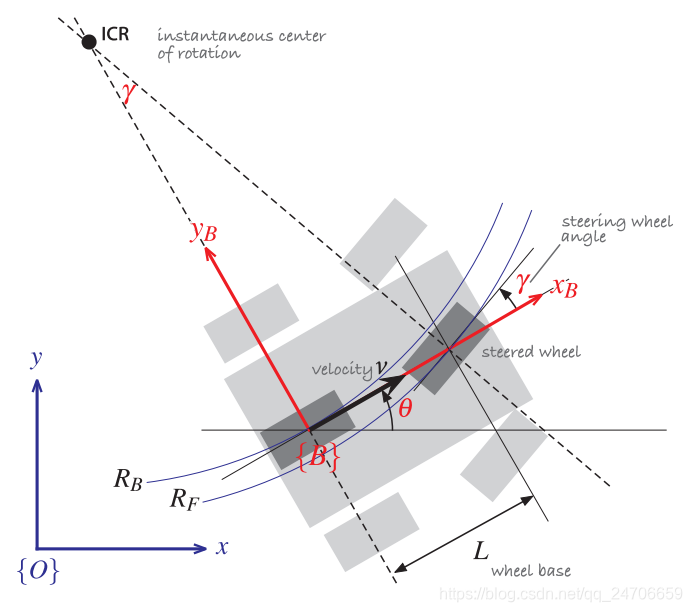
已知车体线速度 v 和角度 w,L 表示车体驱动轮中心与车体转动轮中心的间距,同时设定车体两个驱动轮间距为 d, 求解车体左轮速度 vl、右轮速度 vr 和前轮的角度 γ
旋转半径RB = v/w ,同时旋转半径RB = L/tan(γ),所以γ = arctan(w×L/v)
如果逆时针旋转(左转)
左轮速度 vl =( v / RB )×(RB - d/2)
右轮速度 vr = ( v / RB ) ×(RB + d/2)
否则顺时针旋转(右转)
左轮速度 vl = ( v / RB ) ×(RB + d/2)
右轮速度 vr = ( v / RB ) ×(RB - d/2)
引入符号函数,统一表达为
左轮速度 vl = ( v / RB ) ×(RB - Sgn(w)× d/2)
右轮速度 vr = ( v / RB ) ×(RB + Sgn(w)× d/2)
若已知轮线速度 v0,轮半径 r 和减速机减速比 i ,可以求出电机输出轴转速 = ( v0 / r ) × i × 60 / (2π) ,单位rpm
备注:数学上的Sgn 函数返回一个整型变量,指出参数的正负号。
2.阿克曼转向机构分析
转载自 https://zhuanlan.zhihu.com/p/95744069
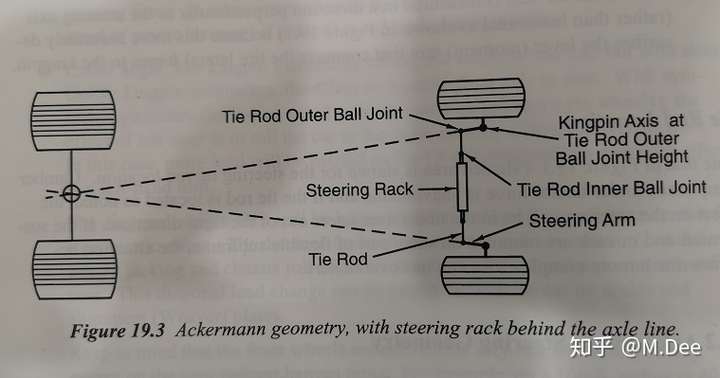
阿克曼转向梯形,指的是车辆俯视图下 左右转向拉杆外点-左右轮主销在转向拉杆外点所在高度横截面交点围成的四边形,如下图所示
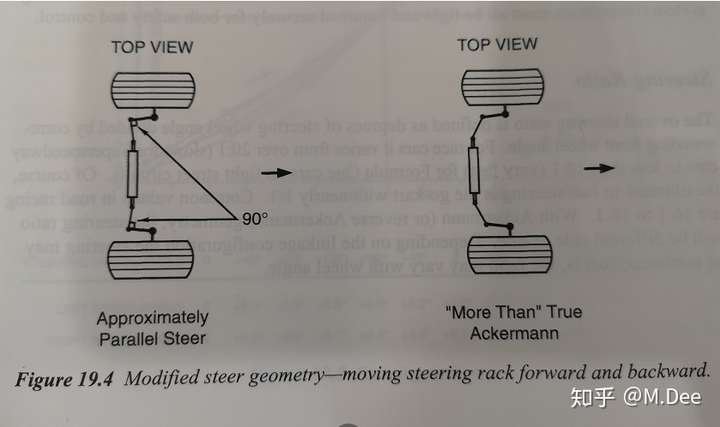
另一种梯形设计方法如下图左图,转向拉杆内点相对于转向拉杆外点更靠前,更趋*于*行转向;
转向拉杆内点相对于转向拉杆外点更靠后,更趋*于阿克曼转向。如下图右图所示



【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步