C++Boost实现Dijkstra算法搜索最小路径
参考:https://jingyan.baidu.com/article/6c67b1d65db36d2786bb1e67.html
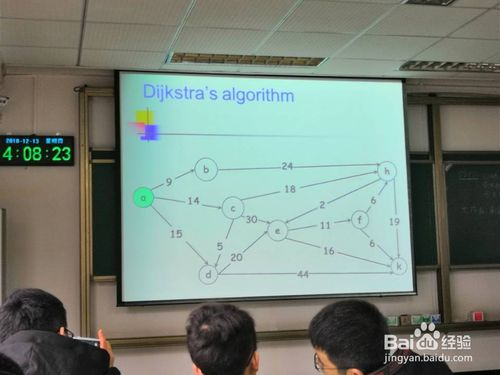
用Dijkstra算法找出该图中从a点到达所有其它结点的最短路径,并给处路径信息
用boost的图论库编辑代码如下:
#include <QCoreApplication> #include <iostream> #include <string> #include <cstdint> #include <boost/graph/adjacency_list.hpp> #include <boost/graph/edge_list.hpp> #include <boost/graph/dijkstra_shortest_paths.hpp> #include <boost/graph/bellman_ford_shortest_paths.hpp> #include <boost/graph/properties.hpp> #include <boost/graph/graph_traits.hpp> #include <boost/graph/iteration_macros.hpp> using namespace boost; using namespace std; int main(int argc, char* argv[]) { QCoreApplication App(argc, argv); typedef property<edge_weight_t, int> EdgeWeightProperty; typedef adjacency_list<listS, vecS, directedS,no_property, EdgeWeightProperty> DirectedGraph; typedef graph_traits<DirectedGraph>::edge_iterator EdgeIterator; typedef property_map <DirectedGraph, vertex_index_t >::type IndexMap; typedef iterator_property_map<char *, IndexMap, char, char & > PredecessorMap; typedef iterator_property_map<int *, IndexMap, int, int & > DistanceMap; typedef graph_traits<DirectedGraph>::vertex_descriptor VertexDescriptor; enum MyNode{ a, b, c, d, e, f, h, k }; char names[] = { 'A', 'B', 'C', 'D', 'E', 'F', 'H', 'K' }; const int num_nodes = sizeof(names)/sizeof(char); cout<<"Num of nodes:"<<num_nodes<<endl; typedef std::pair<int, int> P; P edges[] = { // 路线 P(a, b), P(a, c), P(a, d), P(b, h), P(c, d), P(c, e), P(c, h), P(d, e), P(d, k), P(e, f), P(e, k), P(f, h), P(f, k), P(h, e), P(h, k), }; int weights[] = { 9, 14, 15, 24, 5, 30, 18, 20, 44, 11, 16, 6, 6, 2, 19 }; DirectedGraph g(edges, edges + sizeof(edges) / sizeof(P), weights, num_nodes); property_map<DirectedGraph, edge_weight_t>::type edgeWeightMap = get(edge_weight_t(), g); pair<EdgeIterator, EdgeIterator> ei = boost::edges(g); cout << "Number of edges = " << num_edges(g) << "\n"; cout << "Edge list:\n"; for (EdgeIterator it = ei.first; it != ei.second; ++it ) { char source = names[boost::source(*it, g)]; char target = names[boost::target(*it, g)]; cout <<source <<"->"<<target<< " "<<edgeWeightMap[*it]<< endl; } cout << endl; // Create things for Dijkstra vector<char> predecessors(boost::num_vertices(g)); // To store parents vector<int> distances(boost::num_vertices(g)); // To store distances IndexMap indexMap = boost::get(boost::vertex_index, g); PredecessorMap predecessorMap(&predecessors[0], indexMap); DistanceMap distanceMap(&distances[0], indexMap); VertexDescriptor start = vertex(a, g); dijkstra_shortest_paths( g, start, distance_map(distanceMap).predecessor_map(predecessorMap)); int goalIdx = a; BGL_FORALL_VERTICES(goalIdx, g, DirectedGraph) { VertexDescriptor goal = vertex(goalIdx, g); cout << "From " << names[a] << " to " << names[goalIdx] <<", min distance:" << distanceMap[goalIdx] << ", "; vector<VertexDescriptor> path; VertexDescriptor current = goal; while(current!=start) { path.push_back(current); current = predecessors[current]; } path.push_back(start); // Prints the path obtained in reverse for(vector<VertexDescriptor>::reverse_iterator ri = path.rbegin(); ri != path.rend(); ++ri) { if(ri!=path.rbegin()) cout << "->"; cout << names[*ri]; } cout << endl; } return App.exec(); }
