

数值计算
基于梯度的优化方法
目标函数(准则):需要最小化或者最大化的函数,对其进行最小化时,也称代价函数、损失函数或误差函数。
通常使用上标*表示最小化或最大化的x值,如x* = arg min f(x)
令f'(x) = 0时得到的点有三种情况,如下各种临界点的例子。
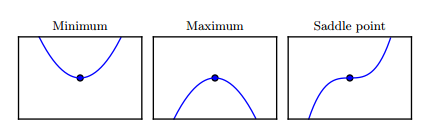
图:临界点的类型。一维情况下,三种临界点的示例,临界点是斜率为零的点。分别是局部极小值,局部极大值和鞍点
针对具有多维输入的函数,则利用偏导数。偏导数∂[f(x)]/∂xi衡量点x处只有xi增加时f(x)如何变化。梯度是相对一个向量求导的导数:f的导数是包含所有偏导数的向量,记为 ▽xf(x)。梯度的第i个元素是f关于xi的偏导数。在多维情况下,临界点是梯度中所有元素都为零的点。
(链式法则用于复合函数的求导)
方向导数是函数f(x+αu)关于α的导数(在α=0时取得),使用链式法则,我们可以看到当α = 0时,∂[f(x+αu)]/∂α = uT▽xf(x)
为最小化f,应找到使f下降得最快的方向。计算导数:minu,uTu=1 uT▽xf(x) = minu,uTu=1 ||u||2 ||▽xf(x)||2cosθ , 其中θ是u与梯度的夹角。将 ||u||2 =1 代入,并忽略与u无关的项,简化得到 minu cosθ。这在u与梯度方向上移动可以减少f(被称最速下降法或梯度下降法)。最速下降建议新的点为x' = x - ε▽xf(x),其中ε为学习率,是一个确定步长大小的正标量。
选择ε的方式:1)直接选择一个小的常数;2)根据几个ε计算f(x - ε▽xf(x)),并选择其中能产生最小目标函数值的ε(线搜索)。
最速下降在梯度的每一个元素为零时收敛(或在实践中,很接近零时)。在某些情况下,也许能够避免运行该迭代算法,并通过解方程▽xf(x) = 0直接跳到临界点。
Jacobian(雅克比)矩阵和Hessian矩阵
梯度向量:目标函数f为单变量,是关于自变量向量x = (x1,x2, ... ,xn)T的函数,单变量函数f对向量x求梯度,结果为一个与向量x同维度的向量,称之为梯度向量;
g(x) = ▽f(x) = (∂f/∂x1,∂f/∂x2,...,∂f/∂xn)T
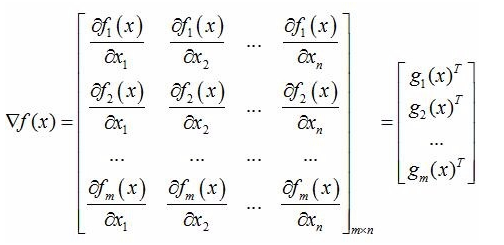
Jacobian(雅克比)矩阵:目标函数f为一个函数向量,f = (f1(x),f2(x),..,fm(x))T,其中,自变量为x=(x1,x2, ... ,xn)T,函数向量f对x求梯度,结果为一个矩阵,行数是f的维数,列数是x的维数,称之为Jacobian矩阵。其每一行都是由相应函数的梯度向量转置构成的。
当目标函数为标量函数时,Jacobian矩阵就是梯度向量。
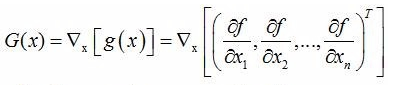
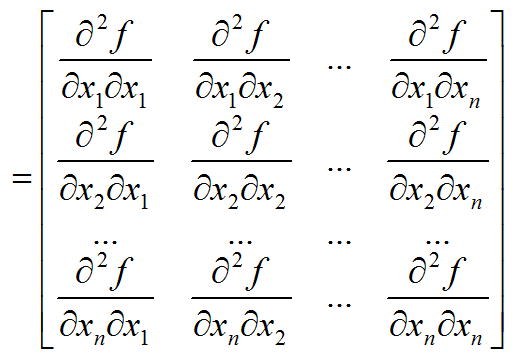
Hessian矩阵:实际上,Hessian矩阵是梯度向量g(x)对自变量x的Jacobian矩阵
Hessian矩阵在牛顿法中的应用,牛顿法主要应用在两个方面:求方程的根和最优化。
约束优化
寻找有等式约束条件的函数的最优值得最优化方法
(i).无约束优化问题,可写为
min f(x)
利用费马引理,即函数f(x)在点ξ的某邻域U(ξ)内有定义,并且在ξ处可导,如果对于任意的x∈U(ξ),都有f(x)≤f(ξ) (或f(x)≥f(ξ)),那么f'(ξ)=0。
求取f(x)对x的导数,令其为零,求得候选最优值,验证:若为凸函数,则为最优解。
(ii). 有等式约束的优化问题,可以写为
min f(x) , s.t. h_i(x) = 0,i = 1,2,...,n
拉格朗日乘子法:通过拉格朗日系数把等式约束和目标函数组合成L(x,λ) = f(x) + λ×h_i(x) 转化为无约束优化问题
(iii). 有不等式约束的优化问题,可写为
min f(x), s.t. g_i(x)≤0,i=1,2,...,n; h_j(x) = 0,j = 1,2,...,n
KKT条件:把所有的不等式约束、等式约束和目标函数全部写成一个式子L(a,b,x) = f(x) + a×g_i(x)+b×h_i(x)
KKT条件是说最优值必须满足以下条件:
1)L(a,b,x)对x求导为零
2) h(x) = 0
3) a × g(x) = 0 (互补松弛条件)
实例:线性最小二乘
假设我们希望找到最小化下式的x值:
f(x) = ½ ×||Ax - b||22
首先计算梯度:
▽x f(x) = AT (Ax - b) = ATAx - ATb
然后采用小的步长,并按照这个梯度下降。
算法:从任意点x开始,使用梯度下降关于x最小化f(x) = ½ ||Ax - b||22的算法
将步长(ε)和容差(δ)设为小的正数。
while ||ATAx - ATb||2 > δ do
x ← x - ε(ATAx - ATb)
end while
除了梯度下降法,也可以用牛顿法。应为真实函数是二次的,牛顿法所用的二次近似是精确的,该算法会在一步后收敛到全局最小点。
现在假设希望最小化同样的函数,但是受xTx≤1的约束。引入Lagrangian:
L(x,λ) = f(x) + λ(xTx - 1)
转换为以下问题:
minx maxλ≥0 L(x,λ)
利用Moore-Penrose伪逆:x=A+b 找到无约束最小二乘问题的最小范数解。如果这一点可行,那么这也是约束问题的解。否则,我们必须找到约束是活跃的解。关于x对上述L(x,λ)微分,得到:
ATAx - ATb + 2λx = 0
化得 x = (ATA+ 2λI)-1 ATb
λ的选择必须使结果服从约束。我们可以关于λ进行梯度上升找到这个值。观察:∂(L(x,λ))/∂λ = xTx -1
当范数超过1时,该导数是正的,所以为了跟随导数上坡并相对λ增加Lagrangian,我们需要增加λ。因为xTx 的惩罚系数增加了,求解关于x的线性方程现在将得到具有较小范数的解。求解线性方程和调整λ的过程将一直持续到x具有正确的范数并且关于λ的导数是0。

