雷达1——基本原理
雷达1 —— 基本原理
1 雷达的原理以及基本组成
1.1 雷达工作原理简介
雷达是利用目标对电磁波的反射(或称为二次散射)现象来发现目标标并测定其位置的。
当雷达探测到目标后,就要从目标标回波中提取有关信息:
- 可对目标的距离和空间角度定位,目标位置的变化率可由其距离和角度随时间变化的规律中得到,并由此建立对目标的跟踪;
- 雷达的测量如果能在一维或多维上有足够的分辨力,则可得到目标尺寸和形状的信息;
- 采用不同的极化,可测量H标形状的对称性。原理上,雷达还可测定目标的表面粗糙度及介电特性等。
1.2 基本雷达方程

发射机前端的功率 ( $P_t $) 、发射天线的增益 ( \(G_{tx}\) )、目标与雷达的距离\(R\) 、
假设雷达发射功率为\(P_t\), 雷达天线的增益为\(G_t\), 距离雷达天线\(R\)远的目标处的功率密度\(S_1\)为
目标受到发射电磁波的照射,因其散射特性而将产生散射回波。散射功率的大小显然和目标所在点的发射功率密度\(S\)以及目标的特性有关。用目标的散射截面积\(\sigma\)(其量纲是面积)表征其散射特性。
若假定目标可将接收到的功率无损耗地辐射出来,则可得到目标散射的功率(二次辐射功率)为
假设\(P_2\)均匀地辐射, 则在接收天线处收到的回波功率密度为
如果雷达接收天线的有效接收面积为\(A_r\), 则在雷达接受处接收回波功率为
由天线理论可知, 天线增益和有效面积之间有如下关系:
其中\(\lambda\)为所用波长, 则接收回波功率可写成如下形式:
雷达方程展示了回波信号的强度与目标距离的关系,表明回波功率与目标距离的四次方成反比。此外,方程也体现了发射功率、天线增益、雷达截面积和系统损耗对回波信号强度的影响。
由式(4)~(6)可看出,接收的回波功率\(P_r\)反比于目标与雷达站间的距离\(R\)的四次方,这是因为一次雷达中,反射功率经过往返双倍的距离路程,能量衰减很大。
接收到的功率\(P_r\)必须超过最小可检测信号功率\(S_{i \min}\), 雷达才能可靠地发现目标,当\(P_r\)正好等于\(S_{i \min}\)时,就可得到雷达检测该目标的最大作用距离\(R_{max}\)。 因为超过这个距离,接收的信号功率\(P_r\)进一步减小,就不能可靠地检测到该目标。它们的关系式可以表达为
或
式(8)、(9)是雷达距离方程的两种基本形式,它表明了作出距离 \(R_{\max }\) 和雷达参数以及目标特性之间的关系。
在(8)中,\(R_{\max}\)与\(\lambda^{2}\) 成反比,而在(9)式中,\(R_{\max}\)却和与\(\lambda^{2}\) 成正比
这是由于当天线面积不变、波长 \(\lambda\) 增加时大线增益下降,导致作用距离减小;
而当天线增益不变,波长增大时要求的天线面积亦相应加大,有效面积增加,其结果是作用距离加大。
雷达的工作波长是整机的主要参数, 它的选择将影响到诸如发射功率、接收灵敏度、天线尺寸、测量精度等众多网索,因而要伞面权衡。
雷达方程虽然给出了作用距离和各参数间的定量关系,但因未考虑设备的实际损耗和环境因素,而且方程中还有两个不可能准确预定的量:目标有效反射面积\(\sigma\) 和最小可检测信号\(S_{\mathrm{imin}}\),因此它常用来作为一个估算的公式,考察雷达各参数对作用距离影响的程度。
雷达总是在噪声和其它干扰背景下检测目标的,再加上复杂目标的回波信号本身也是起伏的,故接收机输出的是随机量。雷达作用距离也不是一个确定值而是统计值,对于某雷达来讲,不能简单地说它的作用距离是多少,通常只在概率意义上讲,当虚警概率(例如\(10^{-6}\))和发现概率(例如\(90%\))给定时的作用距离是多大。
若考虑系统损耗\(L\),则有
\[P_r = \frac{P_t G_t G_r \lambda^2 \sigma }{(4 \pi)^3 R^4L } \]在雷达基本方程和信噪比公式中,\(L\) 表示系统总损耗(Total System Loss)。
系统总损耗综合了雷达系统中各种损耗因素,对雷达性能有重要影响。损耗的来源包括但不限于以下几种:
- 天线损耗:包括发射天线和接收天线的效率损耗。天线的材料、设计和制造工艺都会影响其效率。
- 传播损耗:雷达信号在大气中传播时,由于吸收、散射等原因会产生衰减。这种损耗与天气条件、信号频率等因素有关。
- 馈线损耗:发射机到发射天线、接收天线到接收机之间的传输线路(如同轴电缆、波导管等)也会产生损耗。
- 接收机损耗:接收机内部的各种电路(如滤波器、放大器等)也会引入损耗。
- 匹配损耗:系统各部分之间的阻抗匹配不理想时,会导致能量反射和损耗。
将这些损耗因素综合起来,形成系统总损耗 \(L\),它通常以线性比例或分贝(dB)形式表示。具体公式如下:
\[L = L_{\text{ant}} \cdot L_{\text{prop}} \cdot L_{\text{feed}} \cdot L_{\text{rec}} \cdot L_{\text{match}} \]或者
\[ L_{\text{dB}} = L_{\text{ant,dB}} + L_{\text{prop,dB}} + L_{\text{feed,dB}} + L_{\text{rec,dB}} + L_{\text{match,dB}} \]
\(L_{\text{ant}}\):天线损耗
\(L_{\text{prop}}\):传播损耗
\(L_{\text{feed}}\):馈线损耗 -
\(L_{\text{rec}}\):接收机损耗
\(L_{\text{match}}\):匹配损耗
系统总损耗 \(L\) 越大,表示系统的总效率越低,从而影响雷达接收回波信号的强度,降低信噪比。相反,减少系统总损耗可以提高雷达的性能。因此,在雷达系统设计和维护过程中,尽量减少各种损耗是提高雷达性能的关键。
1.3 最小可检测信噪比
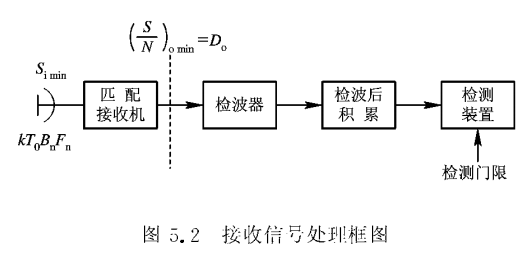
典型的雷达接收机和信号处理框图如图5.2所示,一般把检波器以前(中频放大器输出)的部分视为线性的,中频滤波器的特性近似匹配滤波器,从而使中放输出端的信号噪声比达到最大。
接收机的噪声系数 \(F_{\mathrm{n}}\) 定义为
式中, \(N\) 为接收机输出的噪止功率; \(G_a\) 为接收机的功率增益,\(T_0\) 为标准室温,一般取 290 K 。
输出噪声功率通常足在接收机检波器之前测量。大多数接收机中, 噪声带宽 \(B_{\mathrm{n}}\) 由中放决定, 其数值与中频的$ 3 dB$ 带宽相接近。理想接收机的输入噪声功率 \(N_{\mathrm{i}}\) 为
故噪声系数 \(F_{\mathrm{n}}\) 亦为
将上式整理后得到输入信号 功率 \(S_{\mathrm{i}}\) 的表示式为
\((S / N)_o\) 是匹配接收机输出信号功率 \(S_0\) 和噪声 \(N\) 的比值。根据雷达监测目标质量的要求, 可确定所需要的最小输出信噪比 \((S / N)_{o \min}\) , 这时就得到最小可检测信号 \(S_{i min}\)为
对常用雷达波形来说,信号功率是一个容易理解和测量的参数,但现代雷达多采用复杂的信号波形,波形所包含的信号能量往往是接收信号可检测性的一个更合适的度量。例如匹配滤波器输出端的最大信噪功率比等于\(E_r/N_o\),其中\(E_r\)为接收信号的能量,\(N_o\)为接收机均匀噪声谱的功率谱密度,在这里以接收信号能量\(E_r\)来表示信号噪声功率比值。这样可得到信号噪声功率比的表达式如下:
因此检测信号所需的最小输出信噪比为
在早期雷达中,通常都用各类显示器来观察和检测目标信号,所以称所需的\((S/N)_{o \min}\)为识别系数或可见度因子\(M\)。
多数现代雷达则采用建立在统计检测理论基础上的统计判决方法来实现信号检测,在这种情况下,检测目标信号所需的最小输出信噪比称之为检测因子(Detectability Factor)\(D_o\)较合适,即
\(D_0\) 是在接收机匹配滤波器输出端(检波器输入端)测量的信号噪声功率比值,如图5.2所示。
检测因子D就是满足所需检测性能(以检测概率\(P_{d}\)和虚警概率\(P_{fa}\)表征)时,在检波器输入端单个脉冲所需要达到的最小信号噪声功率比值。
将式代入即可获得用 \((S / N)_{o \min}\)表示的距离方程,
上述公式表明,通过降低噪声系数 \(F_n\),雷达探测距离将增加
当用信号能量
代替脉冲功率 \(P_1\), 用检测因子 \(D_0=(S / N)_{o \min}\) 替换雷达距离方程式时, 即可得到
用检测因子 \(D_0\) 表示的雷达方程为
上式中增加了带宽校正因与 \(C_B \geqslant 1\), 它表示接收机带宽大配所带来的信噪比损失, 匹配时 \(C_{\mathbb{B}}=1 。 L\) 表示系统损耗系数。
1.4 门限检测
接收机噪声通常是宽频带的高斯噪声,雷达检测微弱信号的能力将受到与信号能量谱占有相同频带的噪声能量所限制。山于噪声的起伏特性,判断信号是否出现也成为一个统计问题,必须按照某种统计检测标准进行判断。
奈曼一皮尔逊准则在雷达信号检测中应用较广,这个准则要求在给定信噪比条件下,满足一定虚警概率\(P_{fa}\)时的发现概率\(P_d\)最大。
接收检测系统的方框图如图所示,首先在中频部分对单个脉冲信了进行匹配滤波,接着进行检波,通常是在n个脉冲积累后再检测,故先对检波后的n个脉冲进行加权积累,然后将积累输出与某一门限电压进行比较,若输出包络超过门限,则认为目标存在,则认为没有目标,这就是门限检测。
门限检测是一种统计检测,由于信号叠加有噪声,因而总输出是一个随机量。在输出端根据输出振幅是否超过门限来判断有无目标存在,可能出现以下四种情况:
(1)存在目标时,判为有目标,这是一种正确判断,称为发现,它的概率称为发现概率\(P_d\);
(2)存在目标时,判为无目标,这是错误判断,称为漏报,它的概率称为漏报概率\(P_{la}\);
(3)不存在目标时,判为无目标,称为正确不发现,它的概率称为正确不发现概率\(P_{an}\);
(4)不存在目标时,判为有目标,称为虚警,这也是一种错误判断,它的概率称为虚警概率\(P_{fa}\);
显然四种概率存在以下关系:
每对概率只要知I道其中一个就可以了。我们下面只讨论常用的发现概率和虚警概率。
1.5 虚警概率和发现概率
雷达信号的检测性能由其发现概率\(P_d\) 和虚警概率\(P_{fa}\)来描述,\(P_d\)越大,说明发现目标的可能性越大,此同时希望\(P_{fa}\)的值不能超过允许值。接收机中放输出端的信噪比\((S/N)_o= D_o\)直接与检测性能有关,如果求出了在确定\(P_d\)和\(P_{fa}\)条件下所需的\((S/N)_o= D_o\)值,则根据(3)式,即可求得最小可检测信号\(S_{\mathrm{i} \min }\)。 用这个值代入雷达方程后就可估算其作用距离。
下面分别讨论虚警概率\(P_{fa}\)和发现概率\(P_d\)。
虚警概率\(P_{fa}\)
虚警是指没有信号而仅有噪声时,噪声电平超过门限值被误认为信号的事件。噪声超过门限的概率称虚警概率。显然,它和噪声统计特性、噪声功率以及门限电压的大小密切相关。下面定量地分析它们之间的关系。
通常加到接收机中频滤波器(或中频放大器)上的噪声是宽带高斯噪声,其概率密度函数由下式给出:
此处, \(p(v) \mathrm{d} v\) 足噪所儿压处于 \(v\) 和 \(v+\mathrm{d} v\) 之间的概率; \(\sigma^2\) 是方差, 噪声的均值为零。高斯噪声通过窄带中频滤波器( 其带宽远小于其中心频率) 后加到包络检波器, 根据随机噪声的数学分析可知,包络检波器输出端噪声电压振幅的概率密度为
此处 \(r\) 表示检波器输山端噪声包络的振幅值。可以看出, 包络振幅的概率率度函数是瑞利分布的。设置门限电平\(U_T\),噪声包络电压超过门限电平的概率就是虚警概率,可以由下式求山:

图5.4给出了输出噪声包络的概率密度函数并定性地说明了虚警概率与门限电平的关系。当噪声分布函数一定时,虚警的大小完全取决于门限电平。
表征虚警数量的参数除虚警概率外,还有虚警时间Tr,二者之间具有确定的关系。虚警时间的定.义不止一种,读者在阅读文献和使用有关结果时应注意到。
实际雷达所要求的虚警概率应该是很小的,因为虚警概率\(P_{fa}\)是噪声脉冲在脉冲宽度间隔时间(差不多为带宽的倒数)内超过门限的概率。例如,当接收机带宽为1MHz时,每秒钟差不多有10°数量级的噪声脉冲,如果要保证虚警时间大于1s,则任一脉冲间隔的虚警概率\(P_{fa}\)必须低于10-6.
发现概率\(P_d\)
为了讨论发现概率\(P_d\),必须研究信号加噪声通过接收机的情况,然后才能计算信号加噪声电压超过门限的概率,也就是发现概率P。
下面将讨论振幅为A的正弦信号同高斯噪声一起输入到中频滤波器的情况。
设信号的频率是中频滤波器的中心频率fr,包络检波器的输出包络的概率密度函数为
这里\(I_o(z)\)是宗量为\(z\)的零阶修正贝塞尔函数,定义为
\(r\) 为信号加噪㧁的包络。所表示的概率密度函数称为广义瑞利分布,也称为莱斯 (Rice) 分布, \(\sigma\) 为噪声方差:
信号被发现的概率就是 \(r\) 超过预定门限 \(U_{\mathrm{T}}\) 的概率, 因此发现概率 \(P_{\mathrm{d}}\) 是
从图中可以看出,当虚警概率一定时,信噪比越大,发现概率越人,也就是说,门限也平一定时,发现概率随信噪比的增人
而增大。换句话说,如果信噪比一定,则虚警概率越小(门限电平越高),发现概率越小;虚警概率越大,发现概率越人。这个关系也可以进一步用噪声和信号加噪声的概率密度函数来说明。

图5.8中示出只有噪声和信号加噪声的概率密度函数,信号加噪声的概率密度函数是在(A/o)=3时按式(5.2.14)画出的,相对门限电平(Ur/σ)=2.5也在图中标出了。信号加噪声的概率密度函数的变量r/σ超过相对门限(Ur/σ)=2.5值曲线下的面积就是发现概率,而仅有噪声存在时包络超过门限电平的概率就是虚警概率。显然,当相对门限Uτ/σ提高时虚警概率降低,但发现概率也会降低,我们总是希望虚警概率一定时提高发现概率,这只有提高信号噪声比才能办到。
2 雷达方程的其他形式
2.1 双基地雷达方程
双基地雷达是发射机和接收机分置在不同位置的雷达。收发之间的此离 \(R_{t}\), 较远, 其值可与雷达的探测距离相比。双基地雷达方程可以用和单基地方程完全相同的办法推导。
设目标距离发射机的距离为 \(R_{1}\), 目标经发射功率照射后在接收机方向也将产生散射功率,其散射功率的大小由双基地雷达截面积 \(\sigma_{1}\)来决定,如果目标离接收站的距离为 \(R_{\mathrm{r}}\), 则可得到双基地雷达方程为
式中, \(F_{t}, F_{r}\) 分别为发收天线的方向图传播因子, 它主要考虑反射面多径效应产生的干涉现象,如所讨论。
从式(5.7.6)看, 似乎在 \(R_{t} 、 R_{\mathrm{r}}\) 两值中一个非常小时, 号一个可以任意入;事实上, 由于儿何结构上的原因, \(R_{t}\) 利 \(R_{\mathrm{r}}\) 受到以下两个基本限制:
此处实际雷达观测时, 目标均处于天线的远场区。
当无多径效应而 \(F_{\mathrm{t}}=F_{\mathrm{r}}=1\), 且式(5.7.6) 中条项均不改变时, 乘积 \(R_{\mathrm{r}} R_{\mathrm{r}}=C\) (常数) 所形成的儿何轮廓在任何含有发射一接收轴线的忓面内都是 Cassini 卵形线。双基地雷达探测的儿何关系较单基地宽达要复杂得多。
双基地雷达方程中另一个特点是采用双基地雷达截面积 \(\sigma_{1,}\) 。目标的单基地雷达截面积是由目标的后向散射决定的, 它是姿态角(即观测目标的方向)的函数, \(\sigma_{\mathrm{m}}=\sigma_{\mathrm{m}}(\theta, \varphi\) )。双基地雷达截面积不是由后向散射决定的, 它是收、发两地姿态角的函数, 即 \(\sigma_{1}=\sigma_{1}( \theta_{t}, \varphi_{t}\); \(\theta_{\mathrm{r}}, \varphi_{\mathrm{r}})\) 。
已经有人研究过几种标准形状目标的单基地和双基地雷达截面之间的关系,并得出了一些结论。至于复杂目标 (飞机, 舰航等), 它们的 \(\sigma_{\mathrm{m}}\) 利 \(\sigma_{\mathrm{l}}\) 之间究竟是什么关系, 还有哪些特殊的问题等, 都足需要进一步进行研究和探讨的。
2.2 用信号能量表示的雷达方程
在推导自由空间雷达方程时,首先得到的是以发射功率 \(P_{1}\) 表示的雷达方程:
从上式中可以看出,如果发射和接收天线的增益一定,由于增益 \(G\) 和天线有效面积 \(A\) 满足以下关系:
则波长越短, 天线有效面积 $A $越小, 最大作用距离正比于波长 \(\lambda\) 的开方; 反之, \(A_{t}\) 利 \(A_{\mathrm{r}}-\)定时,\(R_{\max}\)反比于波长\(\lambda\)的开方。
定时, \(R_{\text {max }}\) 反比于波长 \(\lambda\) 的开方。
如式(5.2.4)所示,最小可检测信号 \(S_{i \text { min }}\) 为
而当检波器输入端信噪比 $(S / N)_{0 \text { min }} $用检测因子 \(D_{0}=\left(E_{\mathrm{r}} / N_{0}\right)_{\text {min }}\) 表示时, 如果信号为简单脉冲,则可得最小可检测信号 \(S_{i \text { min }}\) 能量表示的关系式为
将此式代入原雷达方程后, 即可得到通用的用信号能量 \(E_{1}=P_{1} \tau\) 表示的雷达方程式即式 (5.2.7)。
检测网子 \(D_{0}\) 定义于中频滤波器全比配滤波,而 \(C_{\mathrm{B}}\) 表朋中频滤波器大配的影响。
这个方程表明,提高发射机发射能量才能提高接收机的接收能量,这是收发系统改善作用距离的根本途径。提高发射能量的办法是提高脉冲功率增加脉冲宽度 \(\tau\) 。增加脉冲功率受发射管和传输线容量的限制,简单地增大脉冲宽度将会使距离分辨力变差。因而要寻找和采用新的信号型式,它应同时具有大的信宽度和高的距离分辨力,例如线性调频信号、离散编码信号等大时宽带宽积信号(可压维信号)。由于匹配滤波器输出端最大信噪比正比于信号能量,因此以上推山的方程适由于各种信号形式。
已经知道,当 \(M\) 个等幅脉冲相参积累后可将信噪功率比提高为原来的 \(M\) 倍,从而使检测因于 \(D_{0}(M)\) 降低到 \(1 / M\), 即\(D_{0}(M)=\frac{D_{0}(1)}{M}\) 。将相参积累后的关系式代入雷达方程,可得
即由总能量 \(M E_{t}\) 来决定雷达的探测距离。当单个脉冲能量 \(E_{t}\) 一定时,为获得 \(M\) 个脉冲积䍗需要耗费时间资源。
2.3 搜索雷达方程
搜索雷达的任务是在指定空域进行目标搜索。设整个搜索空域的立体角为 \(\Omega\), 天线波束所张的立体角为 \(\beta\) ,扫描整个空域的时间为 \(T_{\mathrm{f}}\) ,而天线波束打过点目标的驻留时间为 \(T_{\mathrm{d}}\), 则有
现在讨论上述应用条作下,雷达参数如何选择最为合理。举例米说,天线增益加大时,一方面使收发能量更集中,有利于提高作用距离,但同时天线波束 \(\beta\) 减小,打过点目标的驻留时间缩短。可利用的脉冲数 \(M\) 减小,这又是不利于发现目标的。下面具体地分析各参数之间的关系。
波束张角 \(\beta\) 和天线增益 \(G\) 的关系为 \(\beta=\frac{4 \pi}{G}\), 代入式(5.7.10), 得到
将上述关系代入宙达方程式(5.2.7), 并用脉冲功率 \(P_{t}\) 与平均功率 \(P_{\mathrm{av}}\) 的关系 \(P_{\mathrm{t}}=P_{\mathrm{av}} T_{\mathrm{r}} / \tau\)
置换后得
式中, \(T_{\mathrm{r}}=1 / \int_{\mathrm{r}}\) ,为雷达工作的重复周期。天线驻留时间的脉冲数 \(M=T_{d} \int_{\mathrm{r}}\) ,天线增益 \(G\)和有效面积 \(A\) 的关系为 \(G=4 \pi A / \lambda^{2}\) 。将这些关系式代入式(5.7.12), 并注意到 \(M D_{0}\) 乘积的䒢义, 此时的 \(D_{0}\) 应是积累 \(M\) 个脉冲后的检测因子 \(D_{0}(M)\) 。如果是理想的相参积累, 则 \(D_{0}(M)=D_{0}(1) / M, M D_{0}(M)=D_{0}(1)\) (在非相参积累时效率稍差)。
考虑了以上关系式的雷达搜索方程为
式(5.7.13)常称为搜索雷达方程。
此式表明,当雷达处于搜索状态工作时,雷达的作用距离取决于发射机平均功率和天线有效面积的乘积,并 与搜索时间 \(T_{f}\) 和搜索空域 \(\Omega\) 比值的四次方根成正比,而与工作波长无直接关系。这说明对搜索雷达而言,应着重考虑 \(P_{\mathrm{av}} A\) 乘积的人小。平均功率和天线孔径乘积的数值受各种条件约束和限制, 各个波段所能达到的 \(P_{\mathrm{av}} A\) 值也不相间。此外,搜索距离还利 \(T_{\mathrm{f}} 、 \Omega\) 有关,允许的搜索时间加人或搜索空域减小,均能提高作用距离 \(R_{\text {maxx }}\) 。
2.4 跟踪雷达方程
跟踪雷达在跟踪工作作状态时是在 \(t_{0}\) 时间内连续跟踪一个目标,若在距离方程式 (5.2.7) 引入关系式: \(P_{\mathrm{r}} \tau=P_{\mathrm{av}} T_{\mathrm{r}}, M T_{\mathrm{r}}=t\), 相参积累时的 \(M D_{0}(M)=D_{0}(1)\) 以从 \(G=\) \(4 \pi A / \lambda^{2}\), 则跟踪雷达方程可化简为以下形式:
如果在跟踪时间内采用非相参积累, 则 \(R_{\max }\) 将会有所下降。
式(5.7.14)是在连续跟踪单个目标的雷达方程。由该式可见,要提高雷达跟踪距离,也需要增大平均功率和天线有效面积的乘积 \(P_{\mathrm{av}} A_{\mathrm{r}}\), 同时要加大跟踪时间 \(t_{0}\) (脉冲积累时间)。也可看出,在天线孔径尺寸相同时,减小工作波长 \(\lambda\) ,也可以增大跟踪距离。选用较短波长时,同样天线孔径可得到较窄的天线波束,对跟踪雷达,天线波束愈窄,跟踪精度愈高。故一般跟踪雷达倾向于选择较短的工作波长。
3 干扰环境下的雷达方程
雷达工作的环境除受到白然条件的影响以外,常常还受到人为的干扰,特别是军用雷达,常常受到敌方干扰机施放的干扰信的干扰,称为有源干扰或积极干扰。有时受到散布在空间的金属带等反射形戍的干扰,这种干扰称为无源干扰或消极干扰。干扰的结果使雷达发现目标困难或使雷达发现目标的距离大大减小。
3.1 有源干扰环境中雷达的作用距离
设干扰机的发射功率为 \(P_{\mathrm{j}}\), 干扰频带为 \(\Delta f_{\mathrm{j}}\), 干扰机正对雷达方向的增监为 \(G_{\mathrm{j}}\), 干扰机到雷达的距离为\(R_i\),雷达天线对着干扰机方向的有效面积为\(A_r^{'}\),,则雷达接收到干扰的功率为功率为
式中, \(\Delta f\) 为雷达接收机带宽, 它一般小于 \(\Delta f_j\) 。 式(5.7.14a)可改写为
这里, \(G_{\mathrm{r}}\) 为雷达天线对着干扰机方向的增益, \(G_{r}^{\prime}=\frac{4 \pi A_{\mathrm{r}}^{\prime}}{\lambda^{2}}\) 。雷达接收到目标的功率为
干扰信号与目标信号同时进入雷达接收机,两者的功率为(由于干扰信号往往很强,可忽略接收机内部噪声)
当目标本身带有干扰机时, \(R_{\mathrm{j}}=R, G_{\mathrm{r}}^{\prime}=G_{\mathrm{r}}, \sigma_{\mathrm{j}}=\sigma\), 则
这时雷达天线的主瓣对准干扰机。为了在这种情况下发现目标,要求 \(P_{\mathrm{r}} / P_{\mathrm{rj}}\) 足够大,并达到检测所需要的信杂比 \(\left(P_{\mathrm{r}} / P_{\mathrm{rj}}\right)_{S}\), 此时相应的作用距离为
其中每赫兹的干扰功率出 \(P_{\mathrm{j} 0}\) 表示,
式(5.7.21)中,\(a\)是与雷达有关的参数,第二个因素是与带干扰机的日标有关的参数。
称\(R_{SS}\)为自屏蔽距离,当目标大于这个距离时雷达不能发现日标,小于这个距离时雷达具有防卫能力。
从式(5. 7.21)可以看出,\(R_{SS}\)与\(P_{j0}\)的二次方根成反比,干扰机的功率密度\(P_{j0}\)越大,\(R_{SS}\)越小。由于\(R_{SS}\)与\(P_{j0}\)的二次方根成反比例关系,因此需要干扰机的功率比雷达的功率小很多。
如果 目标上不带有干扰机,则干扰机与目标处在不同的距离,不同的方向。我们以 \(R_{\mathrm{j}}\)表示干扰机的距离, \(R\) 表示 目标的距离,按照式(5.7.16),( \(\left.P_{\mathrm{r}} / P_{\mathrm{rj}}\right)\) 用雷达检测所需要的信号于扰比 \(\left(P_{\mathrm{r}} / P_{\mathrm{rj}}\right)_{S}\) 代入。这时, \(R\) 对应为目标的作用距离 \(R_{S}\),
由于干扰机和目标在不同的方向,当雷达天线对准目标时,干扰方向的增益\(G_r^{'} <G\),或干扰机处在雷达的旁瓣内,因而在式(5.7.22)巾, \(R_{S}\) 表示雷达副瓣受到干扰时,主瓣方向对准截面积为 \(\sigma\) 的甘标的作卅此离。
3.2 无源干扰环境中雷达的作用距离
无源干扰的主要形式是环境出波和敌方施放的金属带条。它们相当于无源偶极子对雷达辐射的电磁诐形成强反射,从而使雷达观测目标发生困难。
如果被雷达照射的无源干扰区的有效反射面积为 \(\sigma_{\mathrm{c}}\) ,则按照出达基本方程式(5.1.6)得接收功率为
\(L\)为雷达系统的各种损耗。当干扰是偶极子时,设偶极子数目为\(N\),每一偶极子的平均有效截面积为 \(\sigma_{\mathrm{d}}\), 整个偶极子于散布在空间体积为 \(V_{c}\) 内,雷达的分辨空间体积为 \(V\) (设 \(V<\) \(V_{\mathrm{c}}\) ), 则干扰的有效截面积为
式中, \(\bar{\sigma}=\sigma_{\mathrm{d}} N / V_{c}\) 为单位体积的平均截面积。
如果雷达的脉冲宽度为 \(\tau\), 半功率波瓣宽度为 \(\theta_{\alpha}\) 利 \(\theta_{\varphi}\), 则在距离 \(R\) 处, 雷达的分辨体积为
式巾, \(c\) 为电磁波传播速度。
由式(5.7.21)利侙(5.7.25)得
\(\theta_{a} \theta_{\varphi}\) 为天线波瓣的立体角,根据天线理论,它近似等于 \(4 \pi / G\) 。\(G\)是天线增益,代入式(5.7.26),有
将式(5.7.27)代入式(5.7.23) 得
式(5.7.28)可以用来计算雷达对体分布干扰区的作用距离(当 \(P_{\mathrm{c}} / N_{\mathrm{i}}=M\) 时), 即
出于雨、雪、云块也是由小的反射组成的人量的分布目标,因而式(5.7.29)可以用来估算雷达对气象目标的作用距离。由于式中\(R\)与发射功率\(P_t\)是二次方的关系,因此雷达探测气象H标比探测点目标需要的功率小。
如果有用目标处在无源干扰区之中,则对雷达目标的探测距离取决于目标回波信号与干扰回波的信杂比。设 \(S_{0}\) 为接收机输出端目标功率, \(C_{0}\) 为输出端干扰功率, \(\sigma\) 为目标有效面积, \(V<V_{c}\), 则
由于 \(V=(1 / 2) c \tau\left(R^2 \theta_\alpha \theta_{\varphi}\right)\), 代入上式可求山
上面讨论分布体杂波或干扰的情况, 对于面杂波而言, 其截面积可以出单位面积内的截面积 \(\sigma^0\) 表示,因而总的杂波截面积为
\(A\) 为照射面积, 其横向范围取决于雷达水平波速宽度 \(\theta_\alpha\) 。如果脉冲雷达以某个倾角观测散射表面, 使面积 \(A\) 的距离范围取决于脉冲宽度 \(\tau\), 则距离尺寸为 \((c \tau / 2) \sec \psi\), 其中, \(\psi\) 为入射余角, 于是
此时接收机输出端的信号杂波功率比为
\(F^4\) 考虑雷达收发天线方向图因镜面反射而产生的修改因子。
给出检测所需的 \((S / C)_{\min }\), 即可得到距离方程为
山于 \(\sigma^0 、 \psi\) 等均与作用距离有关,故上式还不能直接作为实际出的距离方程。
应当指出,上述无源干扰环境中的雷达作用距离足在没有采用反干扰措施下推导的,现代雷达都有各种各样的反干扰设备,通过这些设备可以大大改善信号与干扰功率比,作用距离会得到改善,因此当有反干扰设备时,作用距离的计算应做相应修改。对于
杂波背景下的雷达作用距离,由于杂波比噪声强得多,冈而可忽略接收机热噪声的影响;对于MTI雷达和脉冲多卜勒雷达,山于其对杂波有很强的抑制能力,因此最终限制雷达作用距离的因素将是经过杂波滤波以后的剩余杂波。在这些情况下的雷达作用距离这里将不一一推导。
本文来自博客园,作者:{珇逖},转载请注明原文链接:https://www.cnblogs.com/zuti666/p/18303324

 浙公网安备 33010602011771号
浙公网安备 33010602011771号