空战博弈编程实现7——将JSBSI和强化学习算法融合
将JSBSim放进强化学习中
1 JSBSim模型
1 状态获取
-
位置 : 横轴,纵轴,竖轴 坐标
fdm["position/lat-gc-deg"] # Latitude fdm["position/long-gc-deg"] # Longitude fdm["position/h-sl-ft"] # altitude "position/distance-from-start-mag-mt" #使用python的Propoerty对属性进行包装 #位置 lat_geod_deg = BoundedProperty('position/lat-geod-deg', 'geocentric latitude [deg]', -90, 90) #水平位置x lng_geoc_deg = BoundedProperty('position/long-gc-deg', 'geodesic longitude [deg]', -180, 180)#y altitude_sl_ft = BoundedProperty('position/h-sl-ft', 'altitude above mean sea level [ft]', -1400, 85000) #高度z dist_travel_m = Property('position/distance-from-start-mag-mt', 'distance travelled from starting position [m]') #从起始位置前进的距离 -
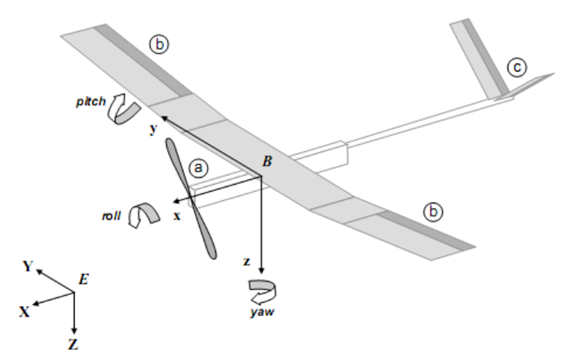
姿态 : 俯仰角、滚转角、偏航角
fdm["attitude/theta-deg"] # pitch fdm["attitude/phi-deg"] # roll fdm["attitude/psi-deg"] # yaw #姿态 pitch_rad = BoundedProperty('attitude/pitch-rad', 'pitch [rad]', -0.5 * math.pi, 0.5 * math.pi) #俯仰角 roll_rad = BoundedProperty('attitude/roll-rad', 'roll [rad]', -math.pi, math.pi)#滚转角 heading_deg = BoundedProperty('attitude/psi-deg', 'heading [deg]', 0, 360)#偏航角 sideslip_deg = BoundedProperty('aero/beta-deg', 'sideslip [deg]', -180, +180) #侧滑角 -
速度 :速度 ,角速度
载体坐标系(Body Frame,符号b) fdm["velocities/p-rad_sec"] # The roll rotation rates fdm["velocities/q-rad_sec"] # The pitch rotation rates fdm["velocities/r-rad_sec"] # The yaw rotation rates #速度 u_fps = BoundedProperty('velocities/u-fps', 'body frame x-axis velocity [ft/s]', -2200, 2200) #b 载体坐标系 v_fps = BoundedProperty('velocities/v-fps', 'body frame y-axis velocity [ft/s]', -2200, 2200) w_fps = BoundedProperty('velocities/w-fps', 'body frame z-axis velocity [ft/s]', -2200, 2200) v_north_fps = BoundedProperty('velocities/v-north-fps', 'velocity true north [ft/s]', float('-inf'), float('+inf')) #局部导航坐标系,东北天ENU坐标系 v_east_fps = BoundedProperty('velocities/v-east-fps', 'velocity east [ft/s]', float('-inf'), float('+inf')) v_down_fps = BoundedProperty('velocities/v-down-fps', 'velocity downwards [ft/s]', float('-inf'), float('+inf')) altitude_rate_fps = Property('velocities/h-dot-fps', 'Rate of altitude change [ft/s]') #高度变化 #角速度 p_radps = BoundedProperty('velocities/p-rad_sec', 'roll rate [rad/s]', -2 * math.pi, 2 * math.pi) q_radps = BoundedProperty('velocities/q-rad_sec', 'pitch rate [rad/s]', -2 * math.pi, 2 * math.pi) r_radps = BoundedProperty('velocities/r-rad_sec', 'yaw rate [rad/s]', -2 * math.pi, 2 * math.pi) -
翼弦 迎角、侧滑角
fdm["aero/alpha-deg"] # The angle of Attack 迎角 fdm["aero/beta-deg"] # The angle of Slip 侧滑角 -
当前指令
# controls state 控制指令状态 aileron_left = BoundedProperty('fcs/left-aileron-pos-norm', 'left aileron position, normalised', -1, 1) #左副翼 aileron_right = BoundedProperty('fcs/right-aileron-pos-norm', 'right aileron position, normalised', -1, 1)#右副翼 elevator = BoundedProperty('fcs/elevator-pos-norm', 'elevator position, normalised', -1, 1)#升降副翼 rudder = BoundedProperty('fcs/rudder-pos-norm', 'rudder position, normalised', -1, 1)#尾舵 throttle = BoundedProperty('fcs/throttle-pos-norm', 'throttle position, normalised', 0, 1)#油门 gear = BoundedProperty('gear/gear-pos-norm', 'landing gear position, normalised', 0, 1)#起落架使用 Property 和 BoundedProperty对属性进行包装
2 姿态设置
-
位置 横轴,纵轴,竖轴 坐标
fdm["ic/lat-gc-deg"] = # Latitude initial condition in degrees fdm["ic/long-gc-deg"] = # Longitude initial condition in degrees fdm["ic/h-sl-ft"] = # Height above sea level initial condition in feet -
姿态 : 俯仰角、偏转角、翻滚角
fdm["ic/theta-deg"] = # Pitch angle initial condition in degrees fdm["ic/phi-deg"] = # Roll angle initial condition in degrees fdm["ic/psi-true-deg"] = # Heading angle initial condition in degrees -
速度
fdm["ic/ve-fps"] = # Local frame y-axis (east) velocity initial condition in feet/second fdm["ic/vd-fps"] = # Local frame z-axis (down) velocity initial condition in feet/second fdm["ic/vn-fps"] = # Local frame x-axis (north) velocity initial condition in feet/second fdm["ic/q-rad_sec"] = 0 # Pitch rate initial condition in radians/second fdm["ic/p-rad_sec"] = 0 # Roll rate initial condition in radians/second fdm["ic/r-rad_sec"] = 0 # Yaw rate initial condition in radians/second
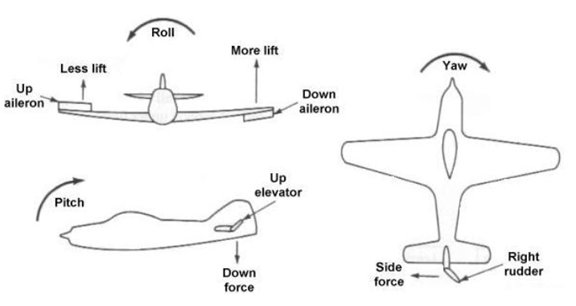
3模型的指令控制
where is the throttle setting and are the angular deflections of right ailerons, elevator, and rudder, respectively
-
# controls state 控制指令状态 aileron_left = BoundedProperty('fcs/left-aileron-pos-norm', 'left aileron position, normalised', -1, 1) #左副翼 aileron_right = BoundedProperty('fcs/right-aileron-pos-norm', 'right aileron position, normalised', -1, 1)#右副翼 elevator = BoundedProperty('fcs/elevator-pos-norm', 'elevator position, normalised', -1, 1)#升降副翼 rudder = BoundedProperty('fcs/rudder-pos-norm', 'rudder position, normalised', -1, 1)#尾舵 throttle = BoundedProperty('fcs/throttle-pos-norm', 'throttle position, normalised', 0, 1)#油门 gear = BoundedProperty('gear/gear-pos-norm', 'landing gear position, normalised', 0, 1)#起落架
the throttle setting 油门设置
fdm["propulsion/refuel"] = True # refules the plane?
fdm["propulsion/active_engine"] = True # starts the engine?
fdm["propulsion/set-running"] = 0 # starts the engine?
fdm["fcs/throttle-cmd-norm"] =
-
ailerons 左右副翼
fdm["fcs/aileron-cmd-norm"]= fcs_left_aileron_pos_norm= fcs_right_aileron_pos_norm = -
elevator 升降舵
fdm["fcs/elevator-cmd-norm"]= fcs_elevator_pos_norm= -
rudder 方向舵
.fdm["fcs/rudder-cmd-norm"] = fcs_rudder_pos_norm
状态空间
两架飞机: 位置 和速度 和姿态信息,载弹量
发射导弹之后:导弹的位置和速度,先不考虑导弹位置和速度
如果考虑导弹位置和速度,导弹的位置和速度也是环境变化中的一个量,且导弹还有自主锁敌的功能,
奖励函数设置
1 距离
距离越近越好,目的是让我方无人机主动接触敌方无人机
基于距离的奖励设置可以分为两个部分,
一部分是根据当前情形下的实际距离给予奖励
第二部分是看当前距离和上一阶段的距离是否发生了变化
但文献指出当目标为动态时,两者间的距离变化不仅与智能体采取的动作相关,动态目标的位置变化也会对其产生影响; 这种情况下,即使智能体采取了远离目标的动作,其仍有可能获得正的额外奖励项。
于是其对上述奖励函数进行了改变,
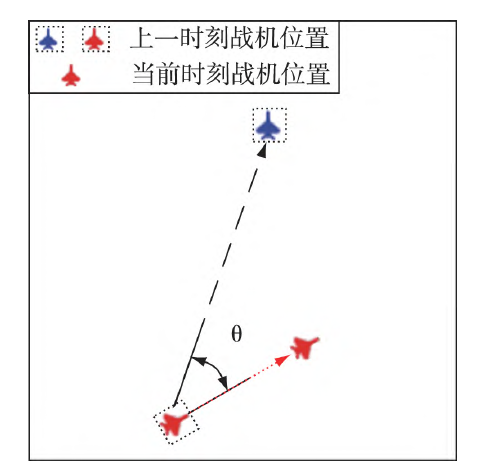
如图4 所示,以上一时刻战机和敌机的相对位置构造矢量,以上一时刻到当前时刻战机的位移构造矢量,两矢量夹角为 ;额外奖励项 reward设置为
此时,只有战机选择向敌机靠近的动作时 ,才能获得正的奖励,战机位移 越大,奖励就越大。 反之,当 战 机选择 远离目标的 动 作时 ,战机获得负的奖励( 即惩罚) ,其位移越大,获得的惩罚也就越大。
3 距离约束
红方和蓝方的活动范围应当被约束在正常高度的空间范围中,当超出指定范围时,应当给予惩罚
代码实现
#根据当前距离,给予奖励
distance_plane_plane = np.linalg.norm(position_plane_blue-position_plane_red,ord=2)
if distance_plane_plane <self.limit_distance :
done = True
reward-distance1 = 50
elif distance_plane_plane < 100 :
reward-distance1 = 5
elif distance_plane_plane < 200 :
reward-distance1 = 4
elif distance_plane_plane < 300 :
reward-distance1=3
elif distance_plane_plane < 400 :
reward-distance1 = 2
elif distance_plane_plane < 500 :
reward-distance1=1
elif distance_plane_plane <800 :
reward-distance1 =0.5
elif distance_plane_plane <1000 :
reward-distance1 =0.2
elif distance_plane_plane <1200 :
reward-distance1=0.1
2
T_1 = [x,y,z]_blue_ago - [x,y,z]_red_ago
T_2 = [x,y,z]_red_now -[x,y,z]_red_ago
cosT = np.dot(T_1 ,T_2 ) / (np.linalg.norm(T_1 ) * np.linalg.norm(T_2 ) )
reward_distance2 = cosT * np.linalg.norm(T_2 )
3
2 视角
两机形成的视角:示意图:
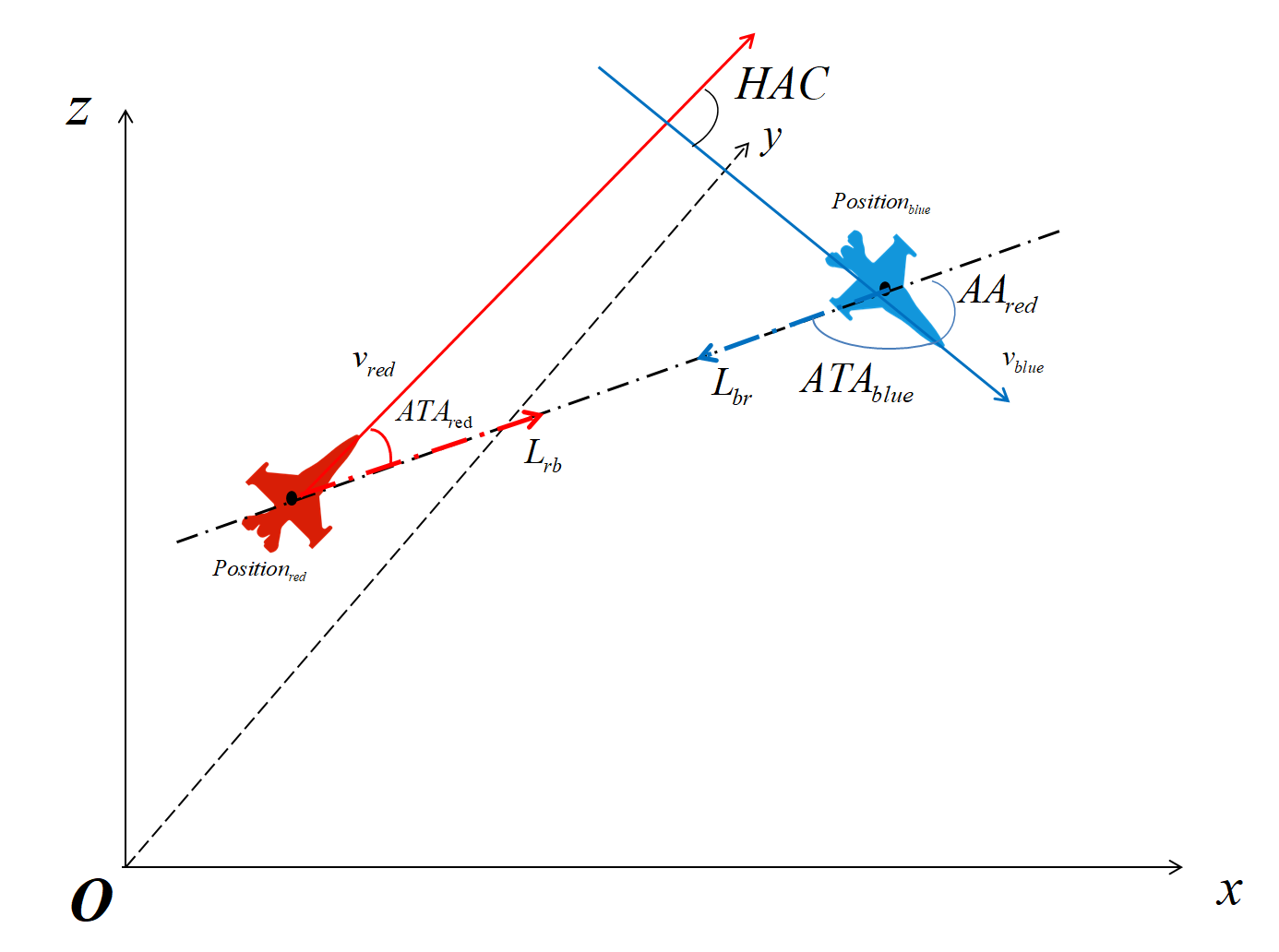
为天线偏转角,也就是速度矢量与 位置连线的夹角
为航向交叉角,也就是两架飞机的速度矢量的夹角
为视界角, 以红方为例,是蓝方的速度矢量方向和 由红方出发的位置连线的夹角
以红方无人机为例:
代码实现:
position_red = [x,y,z]
position_blue = [x,y,z]
L_rb = position_blue - position_red
cos_ATA_red = np.dot(L_rb,v_red) / (np.linalg.norm(L_rb) * np.linalg.norm(v_red) )
ATA_red = np.arccos(cos_ATA_red)
空战优势区
由[文献]([24] Wang Z, Wu H L, Li H, et al. Improving maneuverstrategy in air combat by alternate freeze games with adeep reinforcement learn algorithm[J]. MathematicalProblems in Engineering,2020 (1):1-17.)对空战优势区的定义,得到战机攻击优势区如图所示
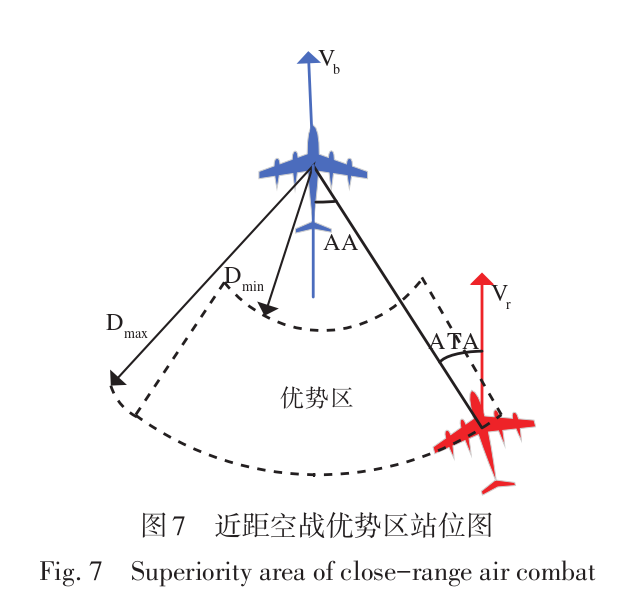
由图 7 可以看出,红方战机的$ ATA AAATA ATA AA$,战机的导弹攻击区也起着至关重要的作用。
以红方为例,红方战机取得优势需同时满足以下条件:
1) 红方战机的在指定的优势范围内。
2) 红方战机的在指定的优势范围内。
3) 红方战机距蓝方战机的距离 介于最短攻击距离和最远攻击距离之间。
4) 红方战机与蓝方战机的高度差 在 到 范围内,该范围由战机的速度和武器攻 击 范 围 决 定
当红方战机满足以上四个条件时,则判定红方战机取得攻击优势。
当解决近距空战机动决策问题,因此当红方战机取得优势时,默认蓝方战机被消灭。
3 速度
具有速度优势的一方更具有作战优势,强机动性能无论是在攻击防御还是支援过程中都能发挥巨大的作用。定义速度回报函数为:
其中, 分别表示红机和蓝机的速度;
4 高度
载机的高度对导弹射程有着不可忽视的影响。高度回报函数定义为:
其中, ——表示调节参数; ——表示高度可调参数。
总的奖励函数
连续回报函数
由距离回报函数Rg、高度回报函数R,、速度回报函数R,和角度回报函数R。利用综合指数法,有:
项目组织架构
本文来自博客园,作者:{珇逖},转载请注明原文链接:https://www.cnblogs.com/zuti666/p/18092816


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律
2023-03-24 Docker 挖坑