多智能体理论
多智能体理论
智能体的基本特性
woofdridge和J七nnLings在总结了前人在agent领域的一些工作后认为Agent的基本特性包括:
(l)自治性:Agent运行时不直接由人或者其他东西控制它对它们自己的行为和内部状态有一定的控制权。
(2)社会性:Agent能够通过某种Agent通信语言与其他agent进行信息交换。
(3)反应性:即对环境的感知和影响。Agent可以感知他们所处的环境并通过行为改变环境。
4)自发性:Agent的行为应该是主动的或者说是自发的。Agent感知周围环境的变化并做出基于目标的行为。
除了以上的基本特性Agent还包括一些其他的属性包括:
(1)移动性:Agent可以从一个地方移动到另一个地方而保持其内部状态不变。Agent可以携带数据和能够在远处执行智能指令。
(2)推理能力:Agent可以根据当前的知识和经验以理性的、可再生的方式推理或推测。
(3)规划能力:Agent可以根据目标、环境等的要求至少对自己的短期行为做出规划具有生成规划的能力。
(4)学习和适应能力:Agent可以根据过去的经验积累知识并且修改其行为以适应新的环境。
智能体的体系架构
可以将中的研究分为下述的三种典型体系结构薛宏涛李海刚
◆慎思型体系结构
基于Simon和Newell的物理符号系统假设,智能体维持着对世界的内部表示,具有能用一定形式的符号推理加以修正的精神状态。根据大多数通用的慎思方法,认知构件基本由两部分组成:世界模型和规划器。这种方法中有-一个基本的假设:对认知功能进行模块化是可能的,即可以分开来研究不同的认知功能(如感知、学习、规划和动作),然后把它们组装在一起构成自治智能体。从工程角度看,功能模块化降低了系统的复杂性。
◆反应式体系结构
起源于Brooks的思想,即智能体不依赖复杂的符号表示,直接根据感知输入产生动作。反应式智能体只是简单地对外部刺激发生反应,不使用复杂的符号推理,反应结构的设计源自这样的假设:智能体行为的复杂性是智能体运作环境复杂性的反映,而不是智能体内部设计复杂性的反映。
◆混合型体系结构
在现实世界或者虚拟社区中,智能体除了要保持对紧急情况的及时反应外,还要使用一定的策略对中短期的行为做出规划,并通过对世界和其他智能体的建模分析来预测未来的状态,以实现和其他智能的协作。所以,作为上述两种体系结构结合的混合型成为最常用的体系结构,既能实现面向目标的长期规划,又具有实时性的特点。这种体系结构在一个智能体中有机的组合了多种相对独立、并行执行的智能形式。
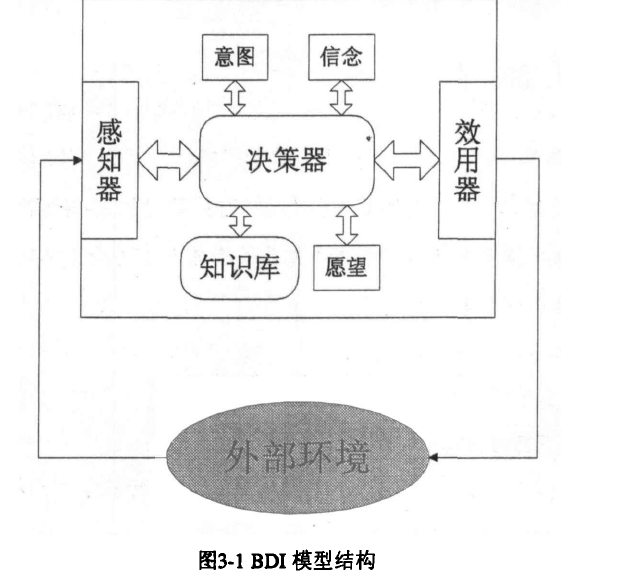
BDI模型
Shoham(1993) 认为智能体是具有包括信念、能力、选择和承诺等精神状态的一个实体.
Bratman提出了BDI理论(Belief-Desire-Intention), Rao和Georgeff (1991, 1995)在此工作的基础上给出了BDI智能体的形式模型,并引入决策理论的思想。Cohen 和Levesque (1990)最早较为系统的讨论了理性平衡、行为意图的形式表示和演化规则,建立了形式语言系统,用于表达对智能体理性行为的规则和约束。
BDI模型侧重于形式描述信念(beli均愿望(desire)和意图(intention)简称BDI其本质上要解决的问题是如何确定主体(ageno的目标以及如何实现这个目标。一个BDI模型包含三个基本成分:
(1)信念(Belief)是一个包括了对世界相关的信念、与其他agent思维趋向相关的信念和自我相关的信念的集合。信念是ageni对世界的认知包含描述环境特性的数据和描述自身功能的数据是agent进行思维活动的基础。
(2)愿望(Desire)是ageni的最初动机是其希望达到的状态或希望保持的状态的集合。主体(agent)希望达到的状态由此可以激发系统的规划和行动。一般来说 可以表达为主体(ageno对环境状态的一种期待和判断 也就是通过判断该状态是否成立作为Des五七是否实现的标志。agent可以拥有互不相容的愿望,而且也不需要相信它的愿望是绝对可以实现的。
(3)意图是承诺实现的愿望中选取的当前最需要完成或者最适合完成的一个是agent将要正在实现的目标它是属于思维状态的意向方向。当前意图对agent的当前动作具有指导性的作用。
多智能体系统(MAS)
MAS理论和技术的研究,主要面向两类复杂的应用环境(刘海龙,2001)。一类是在网络中物理.上分散的节点,这些节点具有一定的自主行为能力;另一类是本质上是集中式的应用问题,但可通过分布式的算法取得更好的解,也称作分布式人工智能(DAI,Distributed Artificial Intelligence)。
智能体决策问题
而所谓的智能体进行决策,也就是指智能体在此模型的基础上,基于问题过程的规律进行规划,利用智能体可行的选择参与改变过程,使其朝自身期望的结果发展,最终解决问题。总的来说,决策基于问题的模型再结合规划的方法两部分完成。
本文来自博客园,作者:{珇逖},转载请注明原文链接:https://www.cnblogs.com/zuti666/p/18092792


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
2023-03-24 Docker 挖坑