


利用SIFT进行特征匹配
SIFT算法是一种基于尺度空间的算法。利用SIFT提取出的特征点对旋转、尺度变化、亮度变化具有不变性,对视角变化、仿射变换、噪声也有一定的稳定性。
SIFT实现特征的匹配主要包括四个步骤:
- 提取特征点
- 计算关特征点的描述子
- 利用描述子的相似程度对特征点进行匹配
- 消除误匹配点
1、 提取特征点
构建尺度空间:模拟图像的多尺度特征。经证实,唯一可能的尺度空间核是高斯函数。用L(x,y,σ)表示一幅图像的尺度空间,由可变尺度的高斯函数G(x,y,σ)和图像卷积产生,即![]() ,其中
,其中 ,(x,y)表示图像上的点,σ是尺度因子。
,(x,y)表示图像上的点,σ是尺度因子。
高斯金字塔:
- 将图像与不同σ的高斯函数做卷积
- 对图像进行降采样

第一阶的第一层是原始图像,同一阶中相邻两层的尺度因子比例为k,其它层依次类推。
第二阶第一层的尺度因子来自于第一阶中间层的尺度因子。
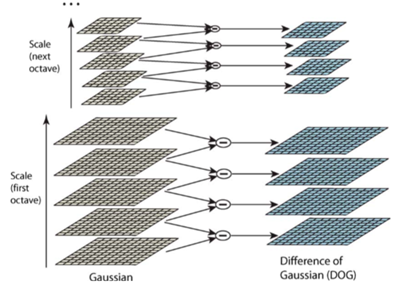
DOG金字塔
Laplace算子: ,具有旋转不变性(证明参考)。
,具有旋转不变性(证明参考)。
LOG算子:将Laplace算子与高斯函数相结合,

为了简化LOG的计算,提出了DOG算子即高斯差分函数:

所以![]() , 而
, 而
所以
根据上面可知,高斯差分算子只是比LOG算子多了一个系数(k-1),并不影响特征点的求解。
所以DOG函数如下:

DOG金字塔通过高斯金字塔相邻尺度空间函数相减得到,第一层的尺度因子与高斯金字塔第一层的尺度因子一致。
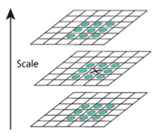
检测极值点,初步确定特征点
该步骤检测DOG空间的最大最小值,需要对DOG尺度空间的每个像素点(除去最顶层最底层)与其周围26个像素点(如下图,同层相邻8个,上一层9个,下一层9个)进行比较。若结果是该像素点比其周围26个像素点值都大或都小,则初步判断为局部极值点,记下其位置和尺度因子。若结果是该像素点比其周围26个像素点值都大或都小,则初步判断为局部极值点,记下其位置和尺度因子。
对上一步得到的特征点进行筛选,去除低对比度及边缘的点。
精确定位极值点:
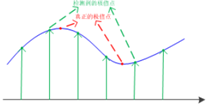
我们找的极值点属于离散空间上的点,不一定是真正极值点,需要一条曲线进行拟合。
设A(x0,y0,σ0)为检测到的极值点,B(x,y,σ)为真正的极值点,在A附近应用泰勒展开公式:

D对x求导,令其为0得:

带入上式得:
若上式求出的中|Δx|或|Δy|或|Δσ|中有一个>0.5,表示该插值点偏离了插值中心,
令x=x+round(Δx)
y=y+round(Δy)
σ=σ+round(Δσ)
继续插值直到达到最大迭代次数或|Δx|、|Δy|、|Δσ|均<0.5。
对得到的极值点B计算D(B)进行低对比度筛选。
消除边缘效应:
目的是消除边缘极值点。边缘极值点满足的条件是:一个方向上变化率非常小,另一个方向上变化率较大(如在黑板上画一条水平线,则水平方向灰度值变化率非常小,垂直方向变化率大,且主曲率与黑塞矩阵的特征值成正比)。根据这一性质,求出黑塞矩阵 ,设H的特征值为λ1、λ2,其中较大的是λ1。令r=λ1/λ2,则边缘极值点即是r比较大的点,设r阈值为thres,对所有的极值点判断其r值是否大于thres,若大于则去除。
,设H的特征值为λ1、λ2,其中较大的是λ1。令r=λ1/λ2,则边缘极值点即是r比较大的点,设r阈值为thres,对所有的极值点判断其r值是否大于thres,若大于则去除。
更简单的方法是,利用 进行筛选,其中λ1+λ1=tr(H),λ1λ2=|H|。
进行筛选,其中λ1+λ1=tr(H),λ1λ2=|H|。
寻找特征点主方向:
对于任一像素点(x,y),
其梯度值:
梯度方向:
对于每个特征点,统计以其为中心的邻域内的像素梯度方向,用直方图表示统计结果,直方图的峰值就是该特征点的主方向。
2、特征点描述子:
以特征点x为中心画圆邻域,将该邻域划分成16个子区域。每为一个单位,那么总共有8个刻度,统计每个子区域内8个刻度值,如下图:

则用16x8=128维矢量作为该特征点的描述子。
3、特征匹配:
分别提取图像1、图像2的特征点并计算描述子。对图像1的每个特征点f,在图像2中找到距离其最近的两个特征点k1、k2,并计算f与k1、f与k2之间夹角θ1、θ2,
若 ,则为一对匹配点。
,则为一对匹配点。
4、消除误匹配点:使用RANSAC算法消除误匹配点
- 随机找到8个特征点对,使用八点法计算基础矩阵F
- 用F验算剩余特征点对,计算用F验算成功的点对数n
- 重复一定次数,找到使n达到最大值的F,不满足F的特征点对删除。
