直线电机设计与优化(TFLM,FSLM)论文阅读笔记3
2.21-(2.7论文引出)傅里叶对开关磁通电机建模
Modeling of Flux Switching Permanent Magnet Machines With Fourier Analysis
1.介绍了FSPM电机,磁路计算法MEC(计算粗糙,磁通路径在旋转或改变几何参数时发生变化),提出了傅里叶分解建立电机模型的办法,通过空间映射进行电机设计方案的优化。
2.分析假想条件:铁心磁导率无限大、软磁材料边界采用诺伊曼边界条件、轴向长度无限制(不考虑端部效应,采用二维极坐标系)、划分区域(五个转子槽口区域、气隙区域、六个永磁区域、六个线圈区域、空气包区域),每个区域有各自的相对独立坐标系,罗马数字为不同区域,数字角标为区域的第几个组成部分

3.场解
a.源:永磁区域中的磁化强度矢量、槽中的定子线圈电流密度矢量
b.磁密度:(微分方程采用分离变量的方式求解)
4.边界条件
5.FEM分析验证计算结果
2.22 双凸极直线电机
A Linear Doubly Salient Permanent-Magnet Motor With Modular and Complementary Structure
1.介绍了双凸极电机Doubly Salient PM(DSPM):定子有绕组和永磁,动子结构与开关磁阻电机(SRM)相同(机械紧凑、高功率密度、容错能力强、磁体不会不可逆退磁)。介绍了现有LDSPM(以下称原始电机)的缺陷(不对称反电势、高齿槽力,a)以及对应的解决方案(分段补偿结构,b)
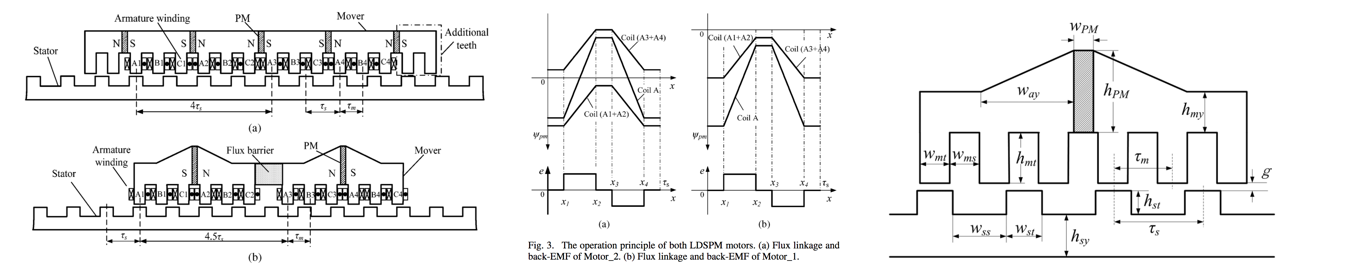
2.拓扑结构:动子由两个单元组成(每个单元长度为定子极距的4.25倍),单元之间用 flux barrier连接,每个单元中摆放一个永磁PM,两个单元的永磁充磁方向相反。上图(中)可以看出原始方案中(b)A1A2A3A4与A相磁链都为单极性,改进方案(a)中,A1A2与A3A4磁链单极性,但A相磁链双极性
原始电机几何结构:当动子齿未对齐时,to minimize the permeance(定子动子齿宽相加小于定子极距);为实现电流换向(定子齿宽大于动子齿宽);动子齿宽取动子齿距的1/2(此处文章定义可能有误);定子齿宽取4/3动子齿宽;保证在电机运行过程中,三相总磁导率恒定(与运动位置无关),但各相磁导率随位置变化。
改进电机几何结构:(不改变)动子齿距、定子齿距、动子齿款、动子齿高、定子齿形、气隙长度、线圈匝数以及槽满率与初始电机相同。(改变)但励磁永磁减少,永磁宽同初始电机、高度加倍;电机运行过程中,各相磁导率以及三相总磁导率恒定(与运动位置无关),不考虑饱和相电感随位移变化小

3.在仿真软件中对两种电机进行仿真,得到其磁场分布(走过的路径;初始电机气隙磁场主要由永磁产生、改进电机电枢反应对于永磁磁场影响不大,因为电枢反应磁通经过相邻动子齿,而非永磁)、磁链、反电势(1改进电机单相反电势空间分布对称性更强,2改进电机三相反电势偶次谐波明显降低,但两种电机奇次谐波均较高)、自感互感(1改进电机A1A2\A3A4自感几乎相同,有180电位移,二者串联时,A相自感系数随位置变化小;2在不同负载下,改进电机互感变化率小于原始电机)、齿槽力(改进电机电角度偏移180度,齿槽力左右动子叠加减小,波动也小于原始电机)、推力对比(改进电机推力波动小,推力推导过程:磁阻力+永磁产生推力,采用无刷直流电机BLDC的控制方式,)。
4.改进电机:优点:轻动子、短动子、永磁使用量少;对称反电势、电感随位置变化小、大推力小波动、低齿槽力。缺点:动子高、定子磁密高。
参考文献:
[]A novel design of linear synchronous motor using FRM topology[]A new cogging-free permanent-magnet linear motor2008[]A new primary permanent magnet linear motor for urban rail transit(文中现有LDSPM,对应图a)[]Design and analysis of a new hybrid excited doubly salient machine capable of field control
2.23-双凸极直线电机(2-22的原始方案)
Compact Double-Sided Modular Linear Motor for Narrow Industrial Applications
1.横向磁通电机:高推力,但磁通路径复杂(需要软磁复合材料SMC-贵);新型双凸极电机:双边结构(消除了定子与动子电枢之间的高吸引力),绕组端部分布在运动方向(可以用在狭窄工作环境)。
2.介绍了经典混合式步进直线电机(高推力,但(缺点)产生的断力破坏了切向力,高吸引力)及其两种改进方案的图示以及FEM仿真分析(左中右分别为经典电机以及两种改进电机)。

3.针对参考文献[2]中提出的电机进行(4.)3D-FEM仿真分析(模型如左下)
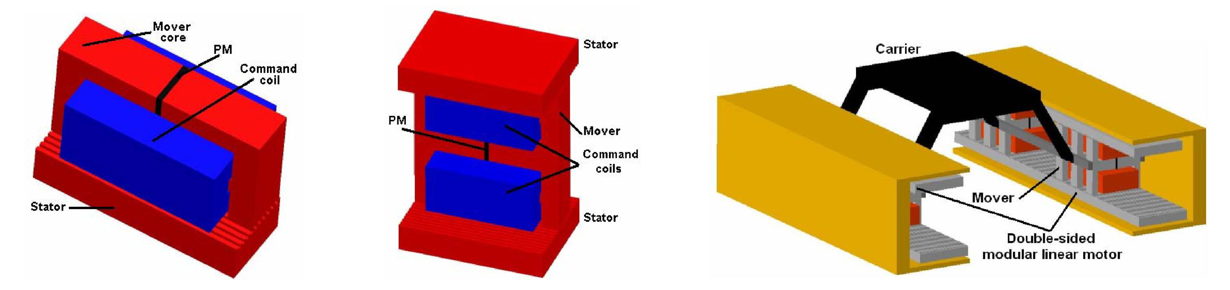
5.进一步提出了变形直线电机(上下双边,中图)
6.直线定位(应用,右上图),两对双边直线电机
参考文献
[]Hybrid Linear Stepper Motors,[x]C.A.D.ofLinear Transverse Flux Motors
2.23~2.24-开关磁通电机的推力优化FSLSM(文中给出了参数表)
Thrust Optimization of a Flux-Switching Linear Synchronous Machine with Yokeless Translator
1.磁通开关电机:PM磁场和电枢磁场互相垂直(高力密度),推力主要来源于永磁
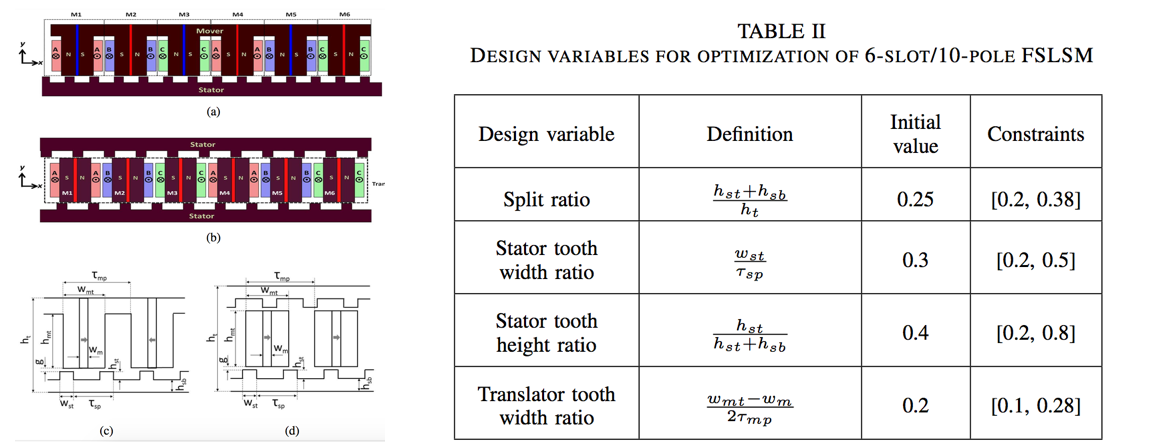
2.拓扑结构:相同:新旧方案采用相同的电流密度、永磁及体积、铁心及体积(便于对比分析);均采用集中型绕组。不同:新方案中所有永磁充磁方向相同;定子上下错开半个齿距(保证磁通对称)。
3.FEM对比新旧结构:新结构反电势对称性更好,幅值更大;新结构在相同电流激励下推力更大;不同电流下推力线性度更好;通入7A电流时,旧电机有一个齿明显饱和;新电机法向力几乎为零。但(缺点)新旧电机齿槽力及磁阻力都相对较大。
4.参数优化推力,优化的过程值得学习,图表表达十分清晰(优化参数如右上图所示,与其他优化方式对比):采用 individual parameter optimization(每次只有一个参数变化,控制其他参数,并将优化结果代入到下一个优化过程)。
优化结果:Split Ratio对于推力影响不大,取相对较小省材料;translator tooth width略小于传统电机(FSLSM利用槽聚集磁通,因此一定范围内,槽越宽,推力越大),定子齿宽和动子齿宽对于磁阻力影响较大;斜型永磁可以减小磁阻力,但会削弱推力平均值;改善电流波形可以改善推力波动;。另外给出了GA分析的过程设置及结果对比。
5.力分析
参考文献
[]Optimal design of a permanent magnet linear synchronous motor with low cogging force,[]Optimization and comparison of novel e-core and c-core linear switched flux pm machines,(GA)[]analysis of a novel double sided flux switching linear motor topology,[]Design optimization of a low- speed single-sided linear induction motor for improved efficiency and power factor,[]Multiobjective design optimization of air-core linear permanent-magnet synchronous motors for improved thrust and low magnet consumption
2.24-C.A.D. OF LINEAR TRANSVERSE FLUX MOTORS(2.23参考)TFM
1.介绍新型TFM:同2.23,可以避免使用复合材料SMC,节约成本。
2.不给绕组激励(动子铁心)、通电(流经铁心+气隙产生推力)两种情况下,动子中的磁通路径。

3.TFM电机设计步骤:设计的时候再看一遍(可以列出flowchart)
4.设计案例(给出了具体参数)
5.结论:电机设计可以模块化,可用于狭窄的工作环境
2.25-斜型永磁对于PMLSM推力波动
Thrust Ripple of a Permanent Magnet LSM With Step Skewed Magnets
讨论电机推力特性,2、4、6次推力谐波由边缘效应产生;12次谐波由齿槽产生
1.PMLSM高推力(相应高推力波动);齿槽力、端部力、永磁饱和造成了推力波动;根据结构参数、负载以及控制方式的不同,居主导地位的因素也相应有变化;主要抑制推力的方法有:优化绕组形状、绕组长度、永磁形状以及永磁排布。
2.拓扑;推力特性分析:随电流密度增加,电推力和推力波动都增加,但是随着电流越大,由于铁心饱和,电推力增长速度下降而推力波动增长速度上升。
3.研究斜型(在旋转电机中主要消除齿槽转矩,在直线电机主要消除由端部效应产生的推力波动谐波)永磁:Step-skew method(左下b);对于抑制推力谐波,分段N越小越好;给出基波推力,谐波推力以及由二者推导出的N-Step skew factor(2-27文章中具体介绍,这篇写的太一般了);利用公式分别推导分段数2、3的Skew factors,并采用数字方法进行优化,找到最合适的Skew Angel。
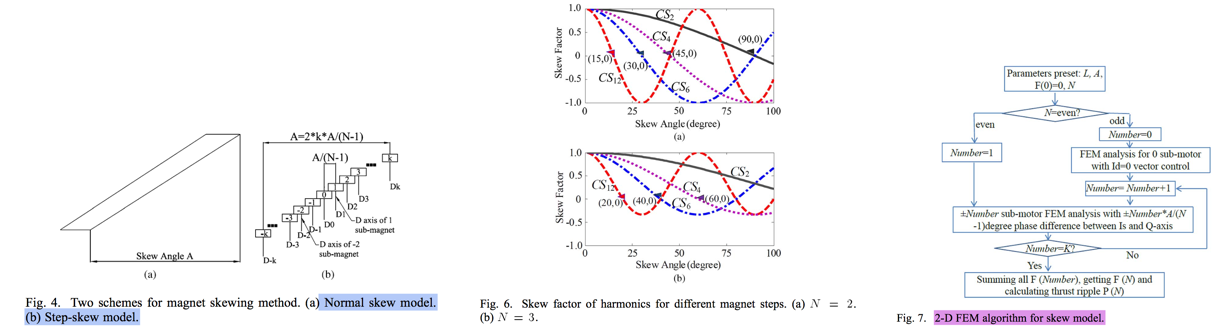
4.FEM仿真分析:通过2D-FEM分析斜型永磁的方式(右上,没看懂),仿真不同Skew Angel和Step Number下推力以及推力波动。当出现相同角度、不同分段数具有相同的推力效果时,采用Fa-N、Pf-N进行对比,得到进一步的分析结果。
2.25~2.26-高精度、高速定位动磁直线电机MPMLSM
High-precision and high-speed positioning of 100 G linear synchronous motor
通过改善动子(减轻)、相位超前的方式提高电机速度和加速度、误差以及运行30分钟的温升情况。
1.定位精度、响应速度决定直线电机性能;给出了两个超高加速度、速度的平面永磁直线同步电机(参考文献[10],[11])。
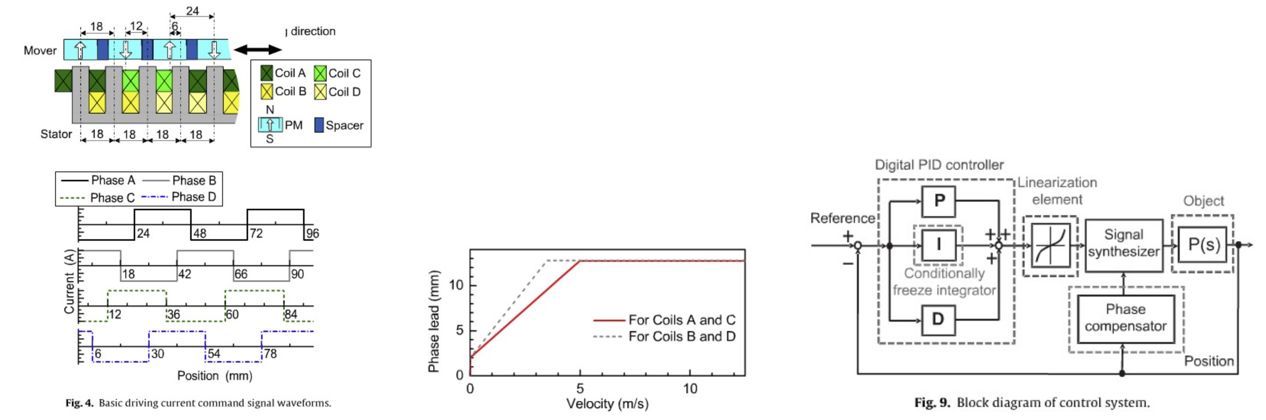
2.减重MPMLSM电机模型:laser displacement sensor测量动子相对位移,中下和右下分别为减轻重量的动子示意图以及实物图;给出了四个线圈(AC组BD组)的排布以及通电方式,信号相位与永磁极距有关。
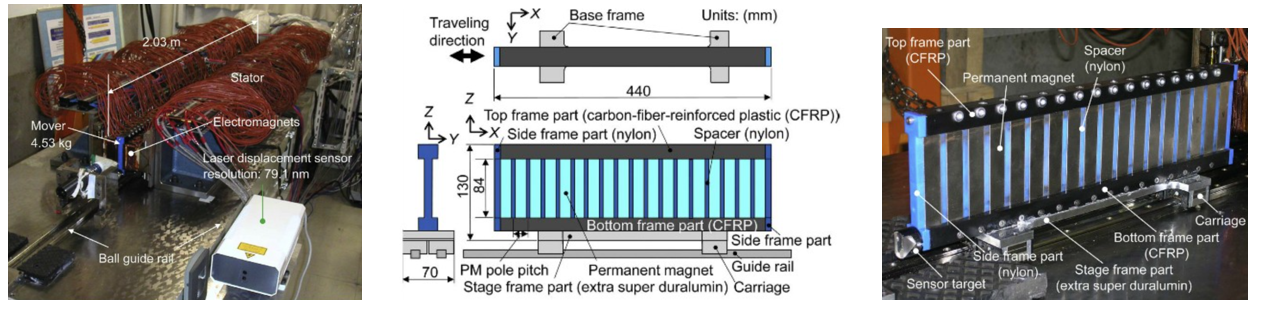
3.驱动特性:激励在线圈电压限制条件下驱动的,这种驱动方式破坏了加速度和速度特性,因此针对flux weakening采用相位超前的方式,具体实施方式如下。
for a mover position below 20mm, a phase lead of 9.3mm was used, and for a mover position above 20mm, a phase lead of 13.3mm was used.
速度响应(测量位移响应+向后微分、二阶低通滤波器);超前相位的电流输入控制可以有效的抑制电流响应的滞后,从而改善驱动特性;四组两种(AC、BD)线圈均需要相位超前函数(下图,为了产生更大推力),由于BD的滞后比AC严重,因此BD的控制相位要更超前;采用两相超前函数的电机控制性能更加优越。
4.定位精度、温升:采用pid控制,仿真得到了定位精度以及温升。
2.26-双边磁通开关电机拓扑结构DSFSLM
Analysis of a Novel Double Sided Flux Switching Linear Motor Topology
传统FSLM的反电势不对称(加end-teeth),定位力低(结构优化),采用 hybrid modeling tool (BEM边界元法+MEC磁路法)分析。
1.DSFSLM具有所有激励在单侧的特性;(文章)之前的FSLM大部分为short-stroke,本文中为long stroke;通常FSLM的分析采用FEM法(非线性材料采用FEM更精确,但耗时),本文采用MEC缺点:1对几何结构变化敏感、2需要预先知道磁通路径、3气隙磁导难以确定(为提高气隙磁导精度,采用BEM边界元法,同时不需要预先知道气隙中的通量路径)。
2.混合建模:利用BEM确定气隙磁导率;计算时不计算全部的气隙,将气隙的轮廓离散成线元(中下),计算段间磁导率。
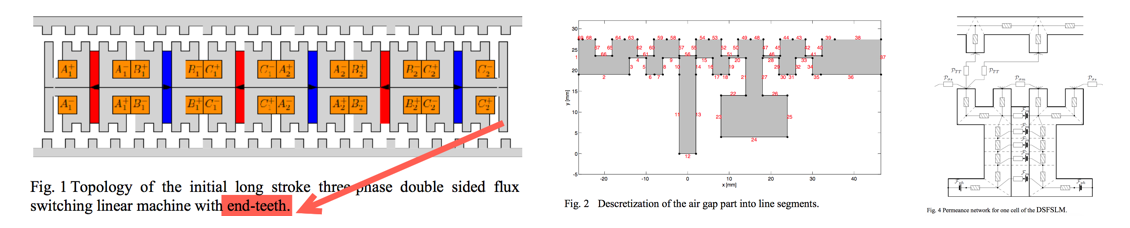
3.分析可以看出:推力波动大、齿槽力小(不平衡的EMF造成,p3给出了推力与反电势的关系);端部线圈磁链与中心不相等,导致反电势幅值降低:因为中心线圈的磁链不仅由自身磁级产生,还由旁边永磁产生(解决方案:在动子端部分别加两个磁级,均衡EMF从而增加齿槽力);
4.优化齿端部:采用matlab中’fmincon'工具,结合混合模型hybrid modeling进行电机参数优化,文中选取四个待优化参数;给出优化结果:以降低推力的代价减小了齿槽力。
2.27-结构、控制补偿PMLSM制动力
Detent Force Compensation for PMLSM Systems Based on Structural Design and Control Method Combination
通过结构优化、控制方法优化减小电机制动力;采用斜型永磁降低推力高次谐波;在速度控制加线性观察器降低推力低次谐波;通过在线计算,将预估的制动力以前馈的方式输入控制系统;利用李雅普诺夫稳定判据,分析算法收敛性。
1.推力波动产生原因:磁阻力、不平衡相位力、相位失调、电流/反电势不对称、齿槽力、电流偏移;detent force包含两个部分:齿槽力cogging force+端部力end effect force;结构改进:1改善主要尺寸(永磁极距[1]、永磁长度[2][3])、(为减小端部力)动子长改善[4][5]、气隙长度、槽开口[6],2相对尺寸:斜型动子/定子[7]、采用分数槽、改进端部齿形、加辅助极[8];控制改进:将预估的制动力以前馈的方式输入控制系统。
2.A分析PM最佳斜度:给出了ICPMLSM(iron core)结构以及具体参数;B分层磁场分析:空气、PM、轭部磁场分析,以及永磁斜型后的磁场分析(给出了零点位置);C制动力分析,detent force表达式;D高谐波抑制:skewing factor[9],针对不同的谐波抑制,采用不同的斜型长度(斜型长度越长,高次谐波改善明显,normal force推力下降,需要找到其中的平衡点)。
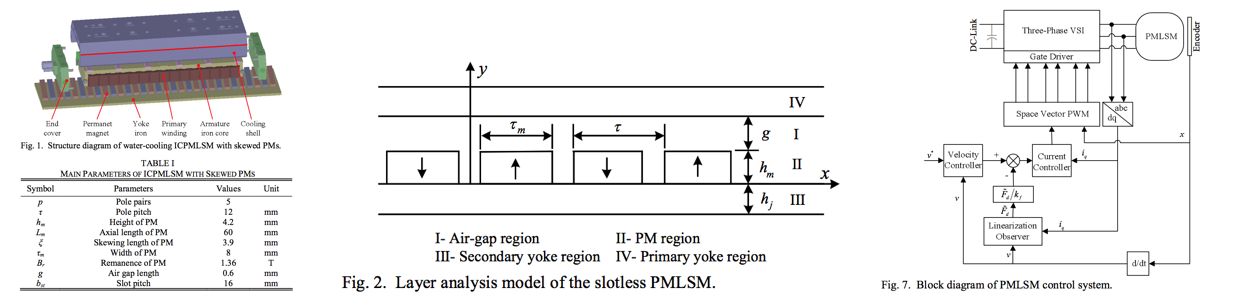
3.离散时间线性化观测器:A给出了电机力学模型、控制方式(右上)、detent force的傅里叶分解(式21),B线性观测器(结合现代控制理论):非线性状态向量转化为线性状态向量,C李雅普诺夫方法证明线性化观测器的收敛性,定义误差向量
4.A仿真验证:未加制动补偿时,速度跟踪性能较差(为抑制速度响应纹波,通过减去补偿电流来修正指令电流),添加前馈后速度响应波动几乎为0;B实验验证:搭建实验平台,给出了具体各部件的型号、参数,得出实验结果:结构+控制优化可以改善电机制动力纹波。
参考文献
[][1]Thrust ripple reduction in ultrahigh-acceleration moving- permanent-magnet linear synchronous motor[][2]Optimal structure design for minimizing detent force of PMLSM for a ropeless elevator[][3]Electro- magnetic normal force characteristics of a permanent magnet linear synchronous motor with double primary side[][4]An approach to a suitable stator length for minimizing the detent force of permanent magnet linear synchronous motors[][5]Detent force reduction in permanent magnet tubular linear generator for direct- driver wave energy conversion[][6]Modeling and parametric design of permanent-magnet AC machines using compu- tationally efficient finite-element analysis,[][7]Performance analysis of skewed PM linear synchronous motor according to various design parameters[][8]Detent force minimization of permanent magnet linear synchronous motor by means of two different methods[][9]Thrust ripple of a permanent magnet LSM with step skewed magnets

 浙公网安备 33010602011771号
浙公网安备 33010602011771号