直线电机设计与优化(TFLM,FSLM)论文阅读笔记2
2.15-2.19大推力低噪声有铁心直线电机(长)(用于光刻机
Linear Iron-core Permanent Magnet Motor with High Force and Low Acoustic Noise
摘要:
振动噪声产生主要原因:高频推力谐波,文中涉及电机兼顾推力和精度(noise)。
1.介绍了旋转电机产生噪声的多种因素,引用文献解释及其削弱方案。
直线电机噪声产生原因(括号内为解决方案):推力谐波(齿优化、深槽)、齿槽力振动(skewed magnets)、机械振动、编码量化误差(改进精度p49)
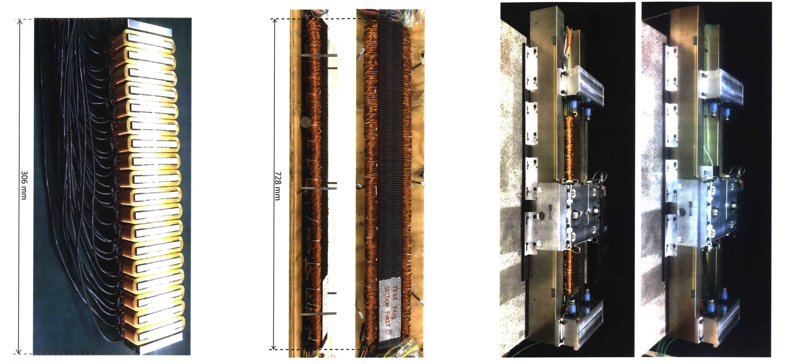
左图Tecnotion的TL18,中图为论文改进样机(细化齿,深槽,多相,Halbach阵列),右图试验台
本文采用长定子,永磁动子结构,为了增大加速度、省去运动线缆。
2.传统有铁心电机TL18:采用FEM分析
其中齿槽力与励磁线圈关系不大,推力波动与励磁电流近似成正比, 单个线圈分别驱动
2.1传统单元电机结构:3-4 combination motor,三个线圈对应四个磁级
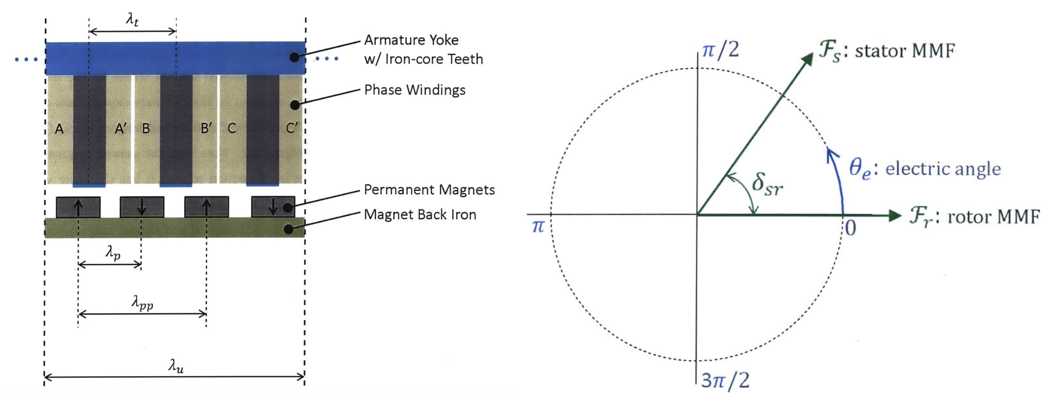
电机定子、动子产生的磁动势均包含高次谐波,因此推测产生的推力也包含高次谐波。
2.2 仿真分析:skewed magnet可以用于消除或者抑制齿槽力,斜角决定了消除的谐波次数,其中齿槽力的基波周期与定子齿距相等。
采用斜型永磁对齿槽力影响:
1.可以消除相应的齿槽力谐波
2.切向、法向齿槽力峰峰值下降
3.若想通过skewed magnet完全消除齿槽力基波,需要倾斜一个齿距,但会破坏推力作用,实际操作中不采用。
4.给出了齿槽力产生的噪声频率。
skewed magnet可以用于降低推力波动及其谐波,但作用不明显。
采用斜型永磁对齿槽力影响:
1.可以削弱切向、法向的推力波动。
2.尽管有skewed magnet,推力波动及其谐波仍然很大。
3.推力波动会产生振动噪声。
3.细化齿形:改善定子磁动势(多相,细齿)以及改善动子磁势波形(Halbach)减小推力谐波。
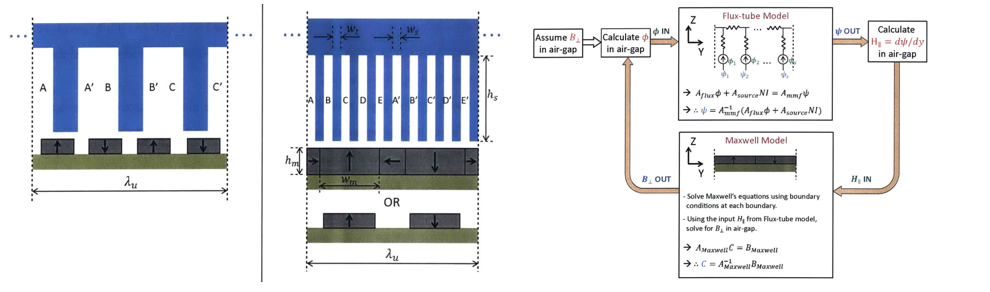
3.2 采用HLM分析方法,定子绕组用磁路法p90-p97(p90磁路示意图,p92各部分磁阻计算),动子采用Maxwell计算p82-p89(Halbach阵列在y方向、z方向分别磁化,利用傅里叶分解得到两个方向的磁化强度p84,并求解泊松方程),二者的结合以及与FEM结果的对比分析(p99-p105)。
3.3 细化齿形电机的设计过程:下图为电机待设计参数,其中齿宽和槽宽相等。

利用HLM选取设计参数p103-p105
1.确定电机几何参数,利用HLM对电机不同相数下的Shear stress per power进行仿真,得到最佳相数。
2.确定定子几何,永磁厚度,对两种充磁体不同比例下的推力进行仿真,得到最佳Halbach阵列方式。
利用FEM选取设计参数(HLM不包含漏磁,对于某些参数优化不适用)p105-
Power Dissiation per Unit 、RMS Current Density——[运行条件]作为横坐标shear stress、stage acceleration——[推力性能]作为纵坐标,分析不同参数下的电机性能
1.确定齿宽、槽宽
2.槽宽与槽高之比
3.线匝数与线径配合
4.永磁厚度:适当范围内越厚,推力性能越好;但厚永磁增大动子重量,会减小运行加速度。(文中首先确定试验台电机的功率等级,在特定功率下选择可以达到最大加速的的永磁体厚度)
3.3 优化后的电机尺寸以及根据实际进行的调整
3.4-3.5 电机最终设计方案p128-p136
4.试验台的设计:对试验台的要求:多样化(4中方案,新旧机单双面),空气轴承(分离磁场与机械噪声),长行程(满足各种速度的测试,光刻机最高速度2.4m/s),考虑电机加速时反作用力(防止其作用于系统其它部分,可以通过平衡重量or增大定子、动子的重量比来改进),位置实时测量(用于控制,精度大于1微米,误差小于10微米),力检测装置(测量齿槽力,便于谐波分析),声音测量装置(20Hz-10kHz)
4.2 分情况讨论平台采用方式:长电枢定子短永磁动子(最终方案)(动子轻、定子动子重量比大、无线缆、但存在没有耦合的电枢发热)、长永磁定子短电枢动子(绕组全部耦合、少量功放、但动子重且有线缆)、短电枢定子长永磁动子(绕组全部耦合、无线缆、但动子重且导轨长)、短永磁定子长电枢动子(无优点、四种方案中动子最重、定子动子比最小、线缆最多、绕组不全耦合、长导轨)
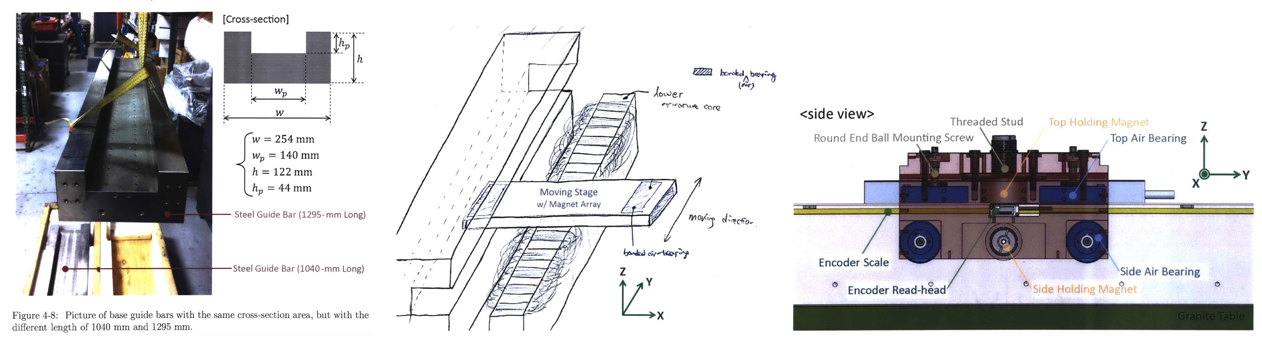
4.3 导轨(左下,图中二者截面相同,长度不同)、空气轴承(中图,通过真空或永磁加预压,两个空气供应线),并给出了CAD绘制的试验台侧视图(右下)
5.试验台搭建:花岗岩底板(大的定动子比例)、钢轨、测功器、气浮导轨、位置传感、减震器和电缆托架、电力驱动器。
5.2 针对改进电机,实验平台进行一系列调整,包括定子安装板、测功器、气浮导轨以及电力驱动。
5.3 噪声收集:压电材料测振、麦克风收集声音。
6.对TL18实验(包含驱动算法以及位置控制器设计):
6.1 电机控制:设定零电位点(选取反电势为0的位置作为零电位点,若安装方式改变,重新确定零电位点,文中选取线圈7作为EMF检测线圈)、电机控制(结合位置传感器以及零电位点,采用NI PXI-8110控制器)、位置控制(PID控制p213-p220)
6.2 实验结果
7.优化电机的实验结果
2.19-High-Force Linear Iron-core Fine-tooth Motor
2.给出了剪切应力tao的求解
3.实验平台搭建:在导轨两端安装了减震器(Shock absorbers (SCS33-25 by ACE))、三轴测力元件安装在定子下方(triaxial load cells (Type 9250A4 by Kistler))、位置传感器(optical linear position sensors (read-head T1001 and scale RGSZ20 by Renishaw))、电机实时控制器( real-time controller (PXI-8110 by National Instruments))、采用钴铁定子材料(减轻材料饱和以及漏磁效应,Hyperco50,可以进一步考虑材料的改机对于电机性能的改善)
注:普通电机采用斜型永磁可以改善力的波动,倾斜一个齿距可以完全改善推力波动,但是相应的会削弱推力产生的效果(compromising the thrust)。但改进电机齿距较小,斜型永磁体可以很容易的倾斜一个齿距,并不对推力产生较大的副作用。

参考文献
[]Ultrahigh-acceleration moving-permanent-magnet linear synchronous motor with a long working range[]Fine grain commutation: Integrated design of permanent-magnet synchronous machine drives with highest torque density,[]Thrust ripple reduction in ultrahigh-acceleration moving- permanent-magnet linear synchronous motor,[]High-precision and high-speed positioning of 100g linear synchronous motor
2.20-Fine-tooth Iron-core Linear Synchronous Motor for Low Acoustic Noise Applications
1.电机噪声:磁场、机械、电(PWM换向纹波、解码器)。旋转电机由径向磁力引起的定子径向变形是噪声的主要部分。
2.直线电机噪声来源:
主要存在两种推力:电推力(电枢引起,与通入电流成比例)、齿槽力(与几何特性和永磁相关)
3.讨论电机推力谐波:细化齿电机的定子和动子磁动势的谐波均减小—推力谐波小,同时齿槽力也可以通过斜型永磁的方式减小(齿距变小,永磁的倾斜角也可以较小,减小齿槽力的同时不影响推力效果)。
4.磁路设计:采用五相(相比于三相单位功率剪应力密度高,进一步加大相数会导致气浮导轨的预压力过大,同时绕线困难,需要多个单相逆变器或定制的5相逆变器,或采用六相细化齿电机,用三个三相逆变器)Number of Slots per Pole= Number of Phase
分析切向力(运动方向)、法向力(垂直方向)随位置变化(周期为一个齿距)
5.试验台搭建,实验结果:定子共180个线圈,线圈双层插入槽内,每相绕组线圈串联;绕组分四段驱动,采用4*5=20个功率放大器;无链接和无铰链的电缆载体(Quantum 040-28 by Tsubaki);加速度计( accelerometers (353B15 and 356A26 by PCB Piezotronics) )和麦克风(microphones (130E20 by PCB Piezotronics) ),实时处理器(real-time processor (PXIe- 8133 by National Instruments))。
6.实验分析:静止、周期运动时的电机噪声;齿槽力产生的噪声。
2.20~2.21-新型直线电机和新型的磁滞电机驱动的磁悬浮线性系统
Linear Stages for Next Generation Precision Motion Systems
1.出于精密运输要求(化学物质在运输中可能会颠簸发生反应),提出磁滞电机驱动的磁悬浮线性系统。
2.低噪声细齿电机及试验台:光学解码器(optical encoders (T1001 and RGSZ20 by Renishaw) )

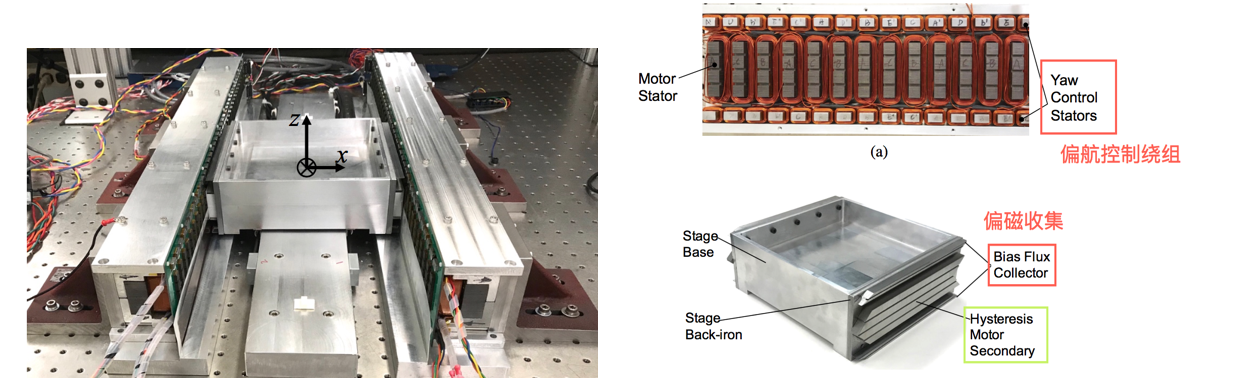
3.磁悬浮线性系统(需要时候再看)
硬件:两定子(一个电机定子、两个偏航控制定子、以及由两排永磁体和一个定子背铁组成的偏磁结构;11相绕组,包含左右各三相控制绕组以及一个五相的偏航控制绕组)+一动子(铝base,两个背铁,两个磁滞电机,四个偏磁收集装置)+一个测量系统(xz方向16个光位移传感器,用于稳定磁悬浮;y方向两排磁传感器,用于测量运动方向位移,无线缆)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号