
发那科机器人报警信息警告代码解决方法
发那科机器人报警信息警告代码:
警告
在程序被校正或返回执行或当从外围单元输入一个紧急制动信号或是其他警告信号时失败则会引发警告。警告是用来提示操作员发生故障,使其为安全起见能中断处理。
提示: 如果出现的警告编号不在这里给出代码内,请和子锐机器人联系解决。
警告代码显示或指示
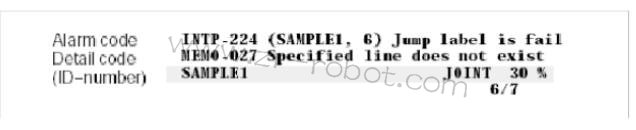
当引发了一个警告,在教导盒上的警告LED 发光二极管会亮起,首先会在出现警告信息,
然后会出现界面命令行。操作员可以通过查看LED 和信息得知引发了哪个警告。
图C-1 警告显示
警告强度
如何操作程序或机器人直到程序或机器人停止取决于引发警告的原因的严重性。这个“严重性”被成为强度。警告强度级别如下所示:
表C-1 警告强度
| 警告强度 | 具体描 |
| WARN 警告 |
WARN 警告是指发生了一个相对较轻的或是相对来说并不严重的故障。WARN 警告不影响机
器人的操作。当WARN 警告出现时, 在教导盒没有相应的LED 或操作面板灯。为了防止可能
的故障,应采取正确的措施。
|
| PAUSE 警告 |
当PAUSE 警告发生, 程序执行被中断, 在当前处理的操作完成后,机器人停止操作。在程序
重新启动前,应为此警告采取正确的措施。
|
| STOP 警告 |
当STOP 警告发生时,程序执行被中断,机器人减速直至停止。在程序重新启动前,应为此
警告采取正确的措施。
|
| SERVO 警告 |
当出现SERVO 警告时,伺服系统电源被关闭以中断程序执行和立即停止机器人。SERVO 警
告是为安全起见或是在机器人操作过程中出现故障。
|
| ORT 警告 | 当出现ABORT 警告时, 程序执行被强行终止,机器人减速直至停止。 |
| SERVO2 警告 |
当出现SERVO2 警告时,伺服系统电源被关闭以中断程序执行和立即停止机器人。SERVO 警
告是为安全起见或是在机器人操作过程中出现故障。
|
| SYSTEM 警告 | 当出现主要的系统故障时, 会引发SYSTEM 警告。当出现SYSTEM 警告,系统中所有的机器 人都要被关闭。在采取正确措施后, 关闭电源,再重新打开。 |
活动警告界面
活动警告界面只显示活动的警告。一旦该警告被警告清除信号输入清除, 活动警告界面显示:
“没有活动的警告” 。
在上一条警告清除信号输入后, 界面显示警告输出。当在警告历史纪录界面按下删除键(+shift),相应的警告会从活动警告界面里清除。
该界面显示警告的严重等级为PAUSE 或更高。不会显示WARN 警告, NONE 警告或重置。
如果系统变量诸如$ER_NOHIS 设置正确的话,一些PAUSE 警告或是更严重的警告也可能不会被显示。
如果检测到了多个警告,该界面按检测到的顺序反向显示。
最大可以显示100 行。
如果警告有错误发生代码,该代码会在警告显示行下显示出来。
图C-2 显示活动警告界面和警告历史记录界面的操作流程。
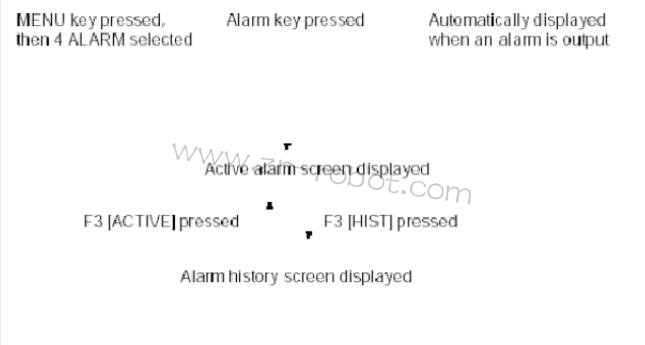
其中: MENU key pressed, then 4ALARM selected 表示:按下MENU (菜单)键,然后选择4ALARM;Alarm key pressed 表示:按下警告键; Automatically displayed when an alarm is
output 表示:当警告被输出会自动被显示; Active alarm screen displayed 表示:显示活动警告界面; Alarm history screen displayed 表示:显示警告历史记录界面。
自动警告显示函数
当检测到一个会导致系统停止( PAUSE 或更严重的警告)的警告,自动警告界面显示函数会自动显示警告界面。这个函数可以使得操作员不用手动显示警告界面, 也可以使得导致系
统故障的原因被快速发现。
提示: 显示要求被满足, 即使在开始时检测到一个警告也会自动显示警告界面。自动警告显示被执行,不考虑启动的模式。
提示: 当连接了CRT,检测到了一个警告,警告界面会在教导盒和CRT 上同时出现。
自动警告界面显示所需条件如下所述:
F 当自动警告界面显示函数的标记被设定了。
C.2 警告代码
SRVO 错误代码( ID=11 )
SRVO-001SERVO Operator panel E--stop
可能原因:操作面板上的紧急停止按钮被按下。
解决方法:顺时针拧动紧急停止按钮以松开此按钮,并按下RESET (重启)。
SRVO-002 SERVO Teach pendant E--stop
可能原因:教导盒上的紧急停止按钮被按下。
解决方法:松开教导盒上的紧急停止按钮。
SRVO-003 SERVO Deadman switch released
可能原因:当开启教导盒时没有按下特殊手持式开关按钮。
解决方法:按下特殊手持式开关按钮以开启机器人控制操作。
SRVO-004 SERVO Fence open
可能原因: 在操作面板的电路板上的接线板上, 在FENCE1 和FENCE2 信号间没有建立联系。当安全门连接上,保护门被打开。
解决方法:在FENCE1 和FENCE2 信号间建立联系,然后按下reset 键。当安全门连接上后在开始工作前关闭此门。
SRVO-005 SERVO Robot overtravel
可能原因: 轴线上的硬件研制开关被绊住了。通常, 机器人的相对每根轴的移动是不会超过最大行程的。然而,在机器人运输过程中,可能为了搬运,将其设置为超行程状态。
解决方法: 1. 检测电力供应设备上的保险丝( F4)。如果被烧断,则更换保险丝。
2. 调用超行程松开界面[SYSTEM OT RELEASE] 来松开超行程轴。
3. 按住shift 键,同时按下警告松开按钮以松开警告。
4. 按住shift 键和执行慢速进给, 把超行程的轴移到允许移动的范围内。
5. 对于用B 柜的模型, 检查紧急制动控制电路板上的保险丝(F2),如果被烧断,则更换保险丝。
6. 更换紧急制动控制电路板。
SRVO-006 SERVO Hand broken
可能原因: 安全把手断开。如果没有找到断开的把手,那么, 很有可能是机器人连线信号HBK 为“ 0”伏。
解决方法: 1. 检查电力供应设备上的保险丝( F4)。如果被烧断,则更换保险丝。
2. 按住shift 键,同时按下警告松开按钮以松开警告。
3. 按住shift 键,通过慢速进给把工具定位到工作区域。
a 更换安全把手
b 检查电线
SRVO-007 SERVO External emergency stops
可能原因: 按下了外部紧急制动按钮。
在操作面板的电路板上的接线板上,在EMGIN1 和EMGIN2 信号间没有建立联系。
解决方法: 如果使用外部紧急制动,清除错误源并按RESET.
如果不使用外部紧急制动, 检查EMGIN1 和EMGIN2 信号间的连线。
SRVO-008 SERVO Brake fuse blown
可能原因: EMG 印刷电路板上的刹闸保险丝烧断。
解决方法: 更换保险丝。检查紧急制动控制印刷电路板上的LED(FALM) 看保险丝是否烧断。
SRVO--009 SERVO Pneumatic pressure alarm
可能原因: 气压警告表示有缺陷。如果气压警告没有被探测到,那么,可能是机器人
连接线的PPABN 信号为“ 0 ”伏。
解决方法:如果气压警告没有被探测到,则查看电线。
SRVO--010 SERVO Belt broken
可能原因: 机器人信号输入( RDI[7] )带断裂
解决方法: 1. 如果发现是带断裂,则修理带,然后按reset 键。
2. 如果发现带是正常的, 机器人连接线上信号RDI[7] 可能异常。查看电线。
3. 检查系统变量$PARAM_GROUP.$BELT_ENABLE.
SRVO--011 SERVO TP released while enabled
可能原因: 操作面板上的教导盒开关在教导盒开启时被操作。
解决方法: 重新连接教导盒线以继续操作。
SRVO--012 SERVO Power failure recovery
可能原因: 正常电源启动(热启动)
解决方法: 这只是个提示。不用特殊做些什么。
SRVO--013 SYSTEM Srvo module config changed
可能原因: 电源重启(热启动) 时,在轴控制印刷电路板上和多功能印刷电路板的DSP模块中的配置文件被修改。
解决方法: 用冷启动的方式启动电源。
SRVO--014 WARN Fan motor abnormal
可能原因: 控制设备中的风扇马达异常。
解决方法: 检查风扇马达和风扇马达连接线。如果有什么问题的话,及时更换。
SRVO--015 SERVO System over heat
可能原因: 控制设备的温度超过标定值。
解决方法: 1. 如果环境温度比标定温度( 45 摄氏度)高的话,改善通风以降低环境温度到标定温度内。
2. 检查风扇是否工作正常。如果异常,检查风扇马达和风扇马达连接线。如果有什么问题的话,及时更换。
3. 如果印刷电路板底板上的自动调温器坏了的话,更换底板元件。
SRVO--016 SERVO Cooling water volume drop
可能原因: 冷凝水体积下降。
解决方法: 咨询我们的客服代表。
SRVO--017 SERVO No robot internal mirror
可能原因: 没有机器人内部镜面。
解决方法: 咨询我们的客服代表。
SRVO--018 SERVO Brake abnormal
可能原因: 刹闸电流超过标定值。
解决方法: 1.对于S-800 和S-900 型机器人,查看紧急制动控制印刷电路板上的保险丝(F1).
2. 检查刹闸电线。
3. 更换放大器。
4.检查是否为100 伏交流输入电压。如果检查到输入电压为90 伏或更低,查看电力输入供应电压。
SRVO--021 SERVO SRDY off (Group:%d Axis:%d)
可能原因:如果没有发现其他警告原因。HRDY 为“ ON/ 开”, SRDY 为“ OFF/ 关”。
(HRDY 是指从主机送到伺服系统的信号,用来标定是否打开伺服放大器的MCC 。SRDY 是指从伺服系统送回到主机的信号,用来显示伺服放大器的MCC 是否打开。一般来说,如果伺服放大器的MCC 没有打开,即使发出了让MMC 打开的信号, 还是会发出警告。如果伺服放大器发出警告,则主机不会处理这个警告( SRDY 为关)。因此,如果没有其他错误发生时,这个警告表示MCC 没有被打开)。
解决方法: 1. 查看安全门是否打开。同时查看门开关。
2. 查看伺服放大器上的交流电压是否为200 伏交流电压。如果发现电压等于或是低于170 伏,查看电力输入供应电压。
3. 更换紧急制动控制电路板。
4. 更换电路板上的主控CPU 。
5. 检查连线,如果必要的话,更换之。
6. 更换伺服放大器。
SRVO--022 SERVO SRDY on (Group:%d Axis:%d)
可能原因: 当通过信号HRDY 已经试图打开MCC 时,SRDY 已经为打开状态。( HRDY是指从主机送到伺服系统的信号, 用来标定是否打开伺服放大器的MCC 。SRDY 是指从伺服系统送回到主机的信号,用来显示伺服放大器的MCC是否打开。)
解决方法: 1. 更换紧急制动控制电路板。
2. 更换电路板上的主控CPU 。
3. 检查连接伺服放大器和主控CPU 电路板的线路。如果发现异常, 则更换线路。
4.更换伺服放大器。
SRVO--023 SERVO Stop error excess(Group:%d Axis:%d)
可能原因: 当马达停止时,产生了一个过度伺服位置错误。
解决方法: 1. 检查所加负载是否超标。如果超标,降低负载。(如果加上了一个超标的负载,所用加速,减速的扭矩也会随之超过马达的最大扭矩。因此,很可能是因为这个原因,导致系统发出上述警告)。
2. 检查应用在伺服放大器上的三相电压( 200 伏交流)间的相间电压。如果发现其值等于或小于170 伏交流,查看电力输入供应电压。(一个低于标准的电压, 如果加在伺服放大器上, 会导致产生一个低于正常之的扭矩。因此,很可能是因为这个原因,导致系统发出上述警告)。
3. 如果输入电压发现等于或是高于170 伏交流电压,则更换伺服放大器。
4.更换马达。
SRVO--024 SERVO Move error excess(Group:%d Axis:%d)
可能原因: 当机器人移动,伺服位置会超过之前标定的值($PARAM_GROU.$MOVER_OFFSTor$PARAM_GROUR.$TRKERRLIM ),从而产生错误。例如,如果机器人的反馈速度不同于标定值时,会发生这个错误。
解决方法: 按之前项目描述的相同操作来执行。
SRVO--025 SERVO Motn dt overflow (Group:%d Axis:%d)
可能原因: 命令输入值过大。
解决方法: 执行冷启动:
1. 关闭机器人。
2. 在教导盒上,同时按住SHIFT 和RESET 键。
3. 按住SHIFT 和RESET 键的同时,开启机器人。如果错误还未清除,则用文档记录下引发错误的事件。
SRVO--026 WARNMotor speed limit(Group:%d Axis:%d)
可能原因: 可能试图超过马达的最大额定转速($PARAM_GROUP.$MOT_SPD_LIM). 可能马达转速已到最大额定转速。
解决方法; 这只是个提示。然而,你应该试图消除这个错误,不要重复可能会导致这个错误的环境条件。
SRVO--027 WARN Robot not mastered(Group:%d)
可能原因: 试图执行校准,但控制尚未完成。
解决方法: 从校准界面[6 SYSTEM CALIBRATION] ,执行控制。
SRVO--030 SERVO Brake on hold (Group:%d)
可能原因:当暂时停止警告功能开启时( $SCR.$BRKHOLD_ENB 设为“ 1 ”),如果发生了暂时停止, 则会产生警告。当这个功能不被使用的时候, 关闭这个功能。
解决方法: 在总体项目设定界面[6 GENERAL SETTING ITEMS] 中关闭[TEMPRORARYSTOP/SERVO OFF] 。
SRVO--031 SERVO User servo alarm (Group:%d)
可能原因:产生了一个用户伺服警告。当系统变量$MCR_GRP[i].$SOFT_ALARM 设为TRUE (真)时,会发出这个警告。只用KAREL 用户可以使用这个变量。
解决方法: 这只是一个提示。不需为此做什么额外的工作。
SRVO--033 WARN Robot not calibrated(Group:%d)
可能原因:试图为简单控制设定一个参考点。但是校准尚未完成。
解决方法: 按下列步骤执行校准。
1. 打开电源。
2. 在校准界面[6SYSYTEM CALIBARTION] 中执行[CALIBARTION] 。
SRVO--034 WARN Ref pos not set (Group:%d)
可能原因:试图执行简单控制,但所需的参考点尚未设立。
解决方法: 在校准界面为执行简单控制设立一个参考点。
SRVO--035 WARN Joint speed limit(Group:%d Axis:%d)
可能原因:试图超过最大连接速度($PARAM_GROUP.$JNTVELLIM) ,连接速度已达到最大额定值。
解决方法: 应用尽一切办法尽可能的消除这个错误。
SRVO--036 SERVO Inpos time over (Group:%d Axis:%d)
可能原因:进入位置监督时间($PARAM_GROUP.$INPOS_TIME) 已经用尽,但是进入位置状态($PARAM_GROUP.$STOPTOL) 尚未建立。
解决方法:和警告SERVO-023 一样处理。
SRVO--037 SERVO IMSTP input (Group:%d)
可能原因:外围设备输入/输出信号IMSTP ,被使用。
解决方法: 打开信号IMSTP 。
SRVO--038 SERVO2 Pulse mismatch (Group:%d Axis:%d)
可能原因:检测到当电源开和电源关时,有一个不同的脉冲量。
解决方法:联系我们当地的客服中心。
SRVO--040 WARNMastered at mark pos(Group:%d)
可能原因:零位位置控制被做成了记号位置(而不是零位位置)。
解决方法:这不算是个警告。
SRVO--041 SERVO2 MOFAL alarm (Group:%d Axis:%d)
可能原因:命令标定的值过大。
解决方法:把引起出错的事件用文档记录下来,然后联系我们当地的客服中心。
SRVO--043 SERVO DCAL alarm(Group:%d Axis:%d)
可能原因: 由于再生的放电所引起的能量过大。从而,所有产生的能量不能很好的散热。
(当操作一个机器人时,伺服放大器需要供给能量给机器人。然而,沿它的竖直方向,机器人会向下使用潜在能量。如果潜在能量的下降超过了其增加的幅度,伺服放大器就要出马达那儿获取更多的能量。这种情况即使不要求重力的影响也会出现。这个能量叫做再生能量。一般来说,伺服放大器通过散热的方式将能量散发出去,过度的能量存储在伺服放大器中,于是引发了这个警告。)
解决方法: 当伺服放大器PSM 的发光二极管显示为“ 8”( DCOH 警告)(当自动调温器检测到再生电阻过热时会发出DCOH 警告)
a. 当能量增加/减少操作频繁进行时,又或当在竖直方向产生一个大的再生能量时, 会引发这个警告。在这种情况下, 应降低机器人的使用强度。
b. 更换再生电阻。
c. 检查伺服放大器(CN8A )和再生电阻的线路。如果必要的话, 更换之。
d. 更换伺服放大器。
SRVO--044 SERVO HVAL alarm(Group:%d Axis:%d)
可能原因: 主要电路电源供应的直流电压高的异常。伺服放大器PSM 的发光二极管显示为“ 7”。
解决方法: 1. 检查伺服放大器所使用的三相输入电压。当电压等于或超过253 伏交流电压时,检查电力输入供应电压。(如果当外电压等于或超过253 伏交流电压时,马达被骤然加速或减速的话,会引发这个警告。)
2. 检查载荷是否在额定值内。如果超过额定负载, 则降低外加负载。(如果负载超过额定值的话,即使外电压满足标定要求,但增大的再生能量可能会引发这个警告。)
3. 检查放大器的连线( CN3 和CN4 )。如果必要的话,更换之。
4. 检查主控CPU 电路板( JRV1 )和紧急制动控制电路板( JRV1 )间的连线。
5. 更换伺服放大器。
SRVO--045 SERVO HCAL alarm(Group:%d Axis:%d)
可能原因:一个过大的电流流入了伺服放大器的主电路中。伺服放大器PSM 的发光二极管显示为“ --”。7 段发光二极管上的红色发光二极管( HC1 到HC6 )中的一个会发亮,显示HCAL 警告检测到的时那根轴的问题。
解决方法; 1. 切断伺服放大器接线器上的马达电源线,然后开启电源。如果还是出现这个警告,更换伺服放大器。
2. 移开伺服放大器接线器上的马达电源线, 然后检查马达电源线U,V,W 和地线是否绝缘。如果发现短路现象,检查马达,机器人的连线,或是机器人内部连线。如果发现异常,更换损坏的硬件。
3. 移开伺服放大器接线器上的马达电源线, 然后用可以检测微小电阻的仪器来检查马达电源线U,V, 之间, V,W 之间和U,W 之间的电阻。如果两两之间测到的电阻大小不一致,则检查马达,机器人的连线,或是机器人内部连线。如果发现异常,更换损坏的硬件。
4.更换主控CPU 印刷电路板。
以上是部分发那科机器人报警代码的解决方法,更多报警代码请查阅说明书。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 10年+ .NET Coder 心语 ── 封装的思维:从隐藏、稳定开始理解其本质意义
· 地球OL攻略 —— 某应届生求职总结
· 提示词工程——AI应用必不可少的技术
· Open-Sora 2.0 重磅开源!
· 周边上新:园子的第一款马克杯温暖上架