
川崎机器人故障报警代码维修排除方法
川崎机器人故障排除参考方法
首先,第一时间做好系统数据备份工作。了解故障现象,通过现场一些设备的基本现象和现场技术人员的描述进行判断,这样机器人维修起来会比较有效率,。
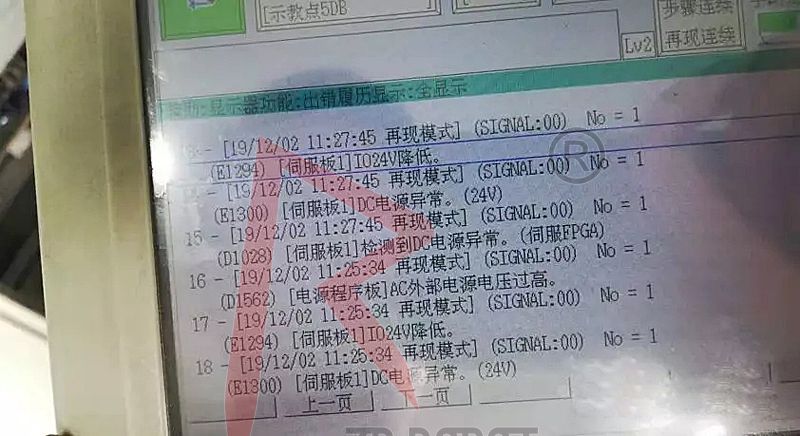
例如,根据一位现场工程师的描述“川崎控制器偶发会产生自动重启现象,这个重启过程中会看到快要启动时,又关了机。经过反复重启后,终于有一次成功启动”。根据系统日志履历信息我们可以看到一些蛛丝马迹。系统一般会报出比较的多故障代码时,我们首先要判断哪个是直接的和间接的故障提示信息,找出真因。比如下图的一些故障信息。
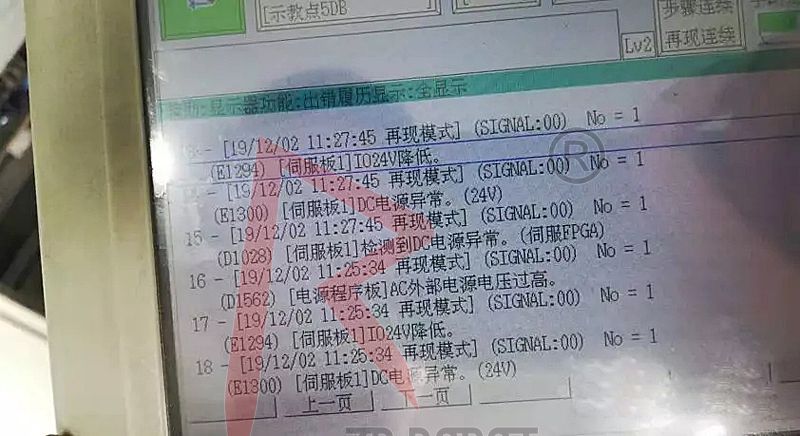
如果现场要判断这些信息需要对故障代码有一些常识,方便判断。
当发生预设的错误时,该错误的代码及其提示信息就会显示在TP屏幕上,并按其状态和严重程度可分为以下四种类型。
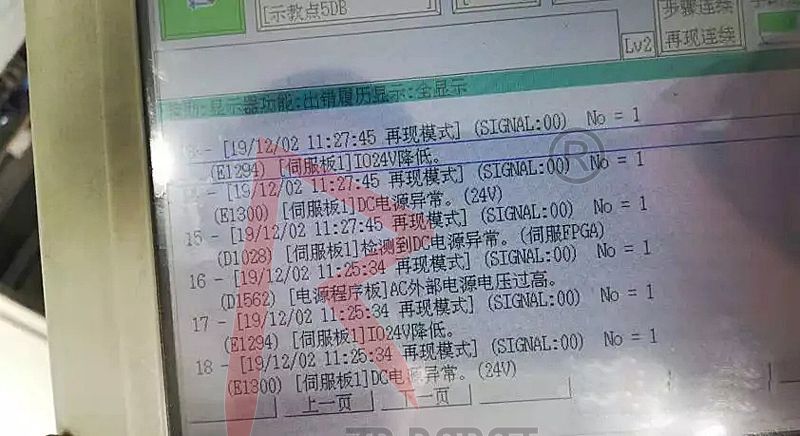
错误代码通常以P、W、E、或D开头(代表错误类型),后面接4为数字编号。比如图中的E1294,下面是每个字母对应的严重程度分类。
1.P:操作错误
由操作错误而引起,该类错误不影响机器人的运动。
例如:“P0126非法的开关名称。”
2.W:警告
这不算是出错,但不解决会引起错误。
例如:“W1013编码器电压低。”
3.E:微小故障
机器人此类微小故障维修,如果引起错误的原因已被清除,可以通过错误复位功能就能恢复,无需开/关控制器电源。
例如:“E1082超出运动范围的绝对下限值。”
4.D:严重故障
这种严重故障涉及硬件、软件或周边装置,不能通过错误复位功能来恢复;它的恢复需要关断并重新开启控制器电源。
例如:“D1528控制器温度超限。”
返回头看下故障图中故障级别最高的是D字开头的1028和1562,而E字开头则为间接性故障信息提示,E字开头大部分都可以复位。
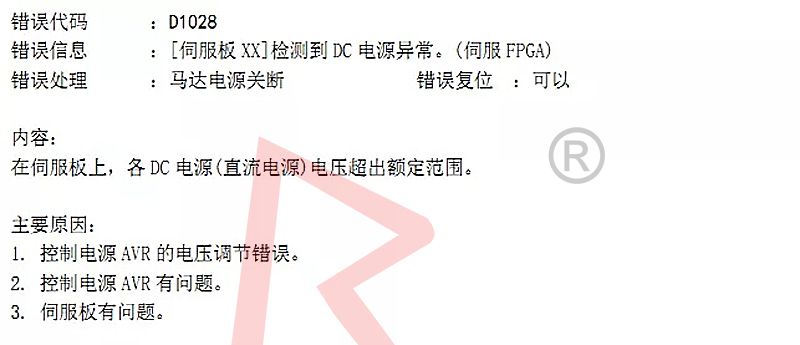
重点检查故障代码D1028和1562,找到故障信息手册中D1028
再看下D1562
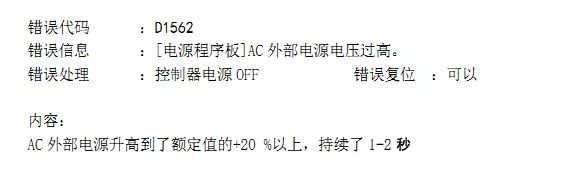
通过这些信息基本可以判断为AVR稳定电源电压问题。AVR(自动电压调节器)是一种密封电子装置,他自身附有并联补偿电源功能。两种情况:一是自身电源板路稳压电路部分出了问题;二是外部(工厂电压不稳定)电源电压异常;
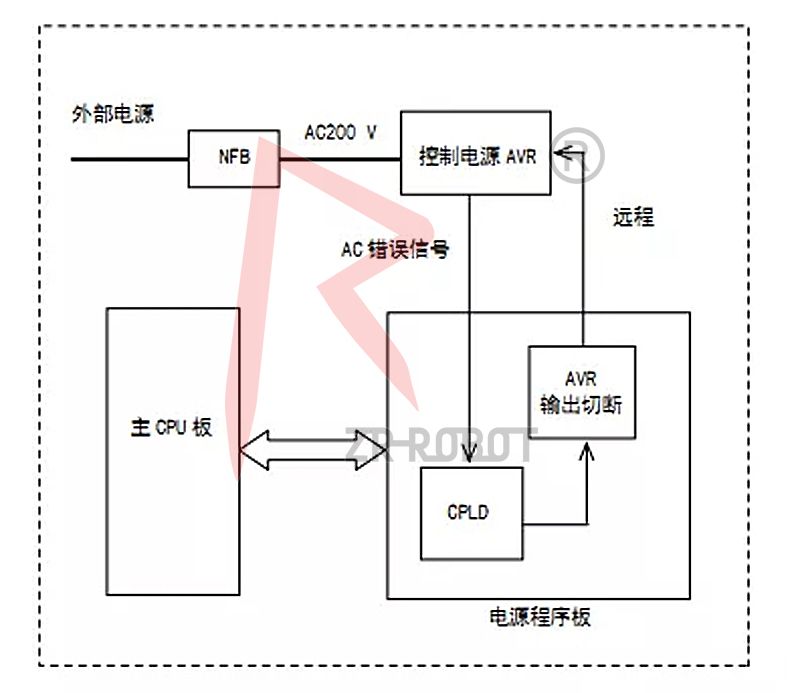
经过测量外部电压约228伏,在98~235.4V范围之内,属于机器人维修的正常现象。由此可以判断为AVR偶发输出了不稳定电压。

