Fanuc机器人与Cognex In-sight系列相机直接通讯的配置方法
一、硬件介绍
机器人型号:FANUC Robot R-1000iA
相机型号:Cognex insight 2000系列智能相机
通讯协议:Ethernet/IP
// 说明:本文采用的通讯方式为:FANUC机器人与Cognex相机直接通讯,该方法是否适用于其他型号的FANUC机器人后续会继续验证。通讯成功后,相机向机械手发送数据,该数据存储在机器人的组GI[*]中。同时,机器人通过GO[*]向相机发送数据。
硬件要求:
1、相机:PC端安装Cognex In-Sight Explorer软件。
该软件可从康耐视官网免费下载,下载链接:https://support.cognex.com/zh-cn/downloads/detail/in-sight/3839/1033
2、机器人:需购买1A05B-2600-R784和1A05B-2600-R785协议
二、软件配置方法
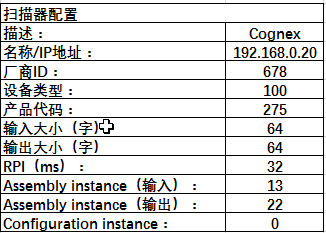
1、相机:相机上电后,打开In-Sight Explorer软件,在“传感器设置”中按照如下方法配置:
配置完成后保存。
2、机器人:
①检查机器人是否开放R784和R785协议。
检查方法:
②配置机器人Ethernet/IP:
通过示教器,MENU→I/O→Ethernet/IP,按照如下方式配置:

说明:
1、描述可以任意填写。
2、机器人默认类型为ADP,需要使用示教器切换为SCN。如果机器人没有开放R785协议,则无法切换。
3、启用默认为无效,需改为有效。
4、状态分为离线、待定和运行中三种,默认状态为离线,待全部配置完成后重新启动机器人,启动方式选择冷启动,状态会自动变为运行中。
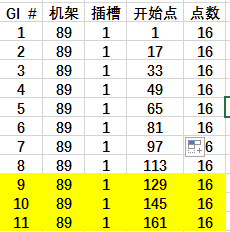
③机器人输入输出设置
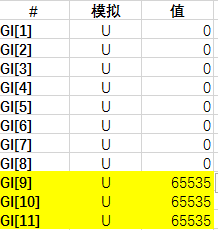
机器人从GI[9]开始接受相机发送的数据,数据长度16位,GI[1]到GI[8]代表的含义待确定。
GI[]分配如下:
一览界面:
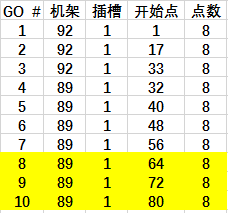
机器人向相机发送数据,从GO[8]开始,长度8位。
GO[]配置如下:
机器人I/O信号分配:
DO[145]:触发使能,该信号常亮。
DO[146]:触发拍照
DO[147]:数据使能
注:触发拍照时,DO[146]置ON,需等待0.5s后,再置OFF。否则会出现机器人收不到数据的情况。


