
REMODE解析
版权声明:本文为博主原创文章,未经博主允许不得转载。
纯视觉的三维重建(不考虑用结构光的那一类)常用的有两大类方法:一类是SfM,缺点是计算量比较大,做不到实时运行;另一类是KinectFusion为代表的用深度相机做实时重建,缺点是一般只能在室内小范围运行。REMODE(REgularized MOnocular Depth Estimation)[1]是用单目RGB相机实现三维重建的不错的工作,可以像SfM一样实现大范围的三维重建(比如配合无人机),又可以像KinectFusion一样实时运行。第一作者Matia Pizzoli从2012年11月到2014年4月(LinkedIn上的资料)在苏黎世大学Davide Scaramuzza的实验室做博士后,REMODE就是在此期间完成的。第二作者Christian Forster从2012年到2016年跟着Davide Scaramuzza读博士,有两个比较重要的工作,一是SVO(Matia Pizzoli是第二作者),二是IMU预积分。两个人现在都在Oculus做计算机视觉算法工程师。
整体来看,REMODE并没有特别的学术创新,更像是融合现有技术挖掘新的应用场景,就像是搭配几个不错的食材炒了一盘新的菜。REMODE主要借鉴了以下四种技术:
- 1)深度滤波器[2]。这是最核心的技术,可以从概率分布的角度融合多帧观测估计出像素的深度信息。论文[2]本身已经可以做稠密三维重建,作者的个人网站上有四个demo视频(http://george-vogiatzis.org/real_time_mvs/)。REMODE在实验评估部分也是和论文[2]做比较。
- 2)论文[4]和DTAM[5]的正则化损失函数(regularized cost),目的是平滑表面。由于深度滤波器是单独计算每个像素的深度,没有考虑像素与像素之间的约束关系,所以重建出的表面会有很多毛刺、噪声。对正则化损失函数优化求解后,可以得到更好的重建效果。
- 3)SVO[3]。论文[2]中,作者在物体周围贴了很多marker来辅助估计相机的位置姿态。而REMODE直接用了SVO,不需要贴marker。
- 4)凸优化[6],加速求解正则化损失函数。
本文主要解读深度滤波器和正则化损失函数,这两部分内容是REMODE的核心,解决了估计深度的问题。SVO可以参考之前的文章。凸优化那篇论文很有影响力,2011年到现在已经有2000多的引用量,但是是纯数学推导,就没细看。按REMODE中的描述,该方法根据原损失函数构造了一个新的函数(primal dual formulation),优化时交替地对prima variable和dual variable分别执行梯度下降和梯度上升,可以达到加速优化求解的作用。
1. 深度滤波器
深度滤波器的本质是贝叶斯估计:已知先验概率分布,根据新的测量值求出后验概率分布。所以可以很方便地一步一步迭代求解,计算效率高。深度的观测值是沿极线找到匹配然后三角化得出的,这一过程很容易产生误匹配导致“坏测量”。所以深度滤波器把观测值的分布看成正态分布和均匀分布的叠加,“好测量”(内点)服从围绕真值的正态分布,“坏测量”(外点)服从区间$[d_{min},d_{max}]$内的均匀分布,具体公式如下:
$$p(d_k|\hat{d},\rho)={\rho}{N}(d_k|\hat{d},\tau_k^2)+(1-\rho){U}(d_k|d_{min}, d_{max})$$
其中,$\rho$和$\tau_k^2$分别是内点的概率和方差,$\hat{d}$是真值。假设每一次观测都是独立的,按时间戳顺序第r次观测初始化了一个深度滤波器的“种子”(seed,每个种子对应一个地图点),第k次观测后求出的后验概率为
$$p(\hat{d},\rho|d_{r+1},...,d_k) {\propto} p(\hat{d},\rho)\prod\limits_{k}p(d_k|\hat{d},\rho)$$
其中,$p(\hat{d},\rho)$是真值和内点概率的先验信息。上面这个公式是很难直接处理的,论文[2]提出可以用高斯分布和Beta分布的乘积来近似,高斯分布描述深度,而Beta分布则描述内点的比例:
$$q(\hat{d},\rho|a_k,b_k,\mu_k,\sigma_k^2)=Beta(\rho|a_k,b_k){N}(\hat{d}|\mu_k,\sigma_k^2)$$
其中,$\mu_k$和$\sigma_k^2$是深度估计的均值和方差,$a_k$和$b_k$控制Beta分布,可以看成是这个“种子”从初始化到k时刻所有观测中内点和外点的数量。如果第k-1次后验估计用上面高斯$\times$Beta描述,则第k次观测后的更新方程为:
$$p(\hat{d},\rho|d_{r+1},...,d_k) {\approx} q(\hat{d},\rho|a_{k-1},b_{k-1},\mu_{k-1},\sigma_{k-1}^2)p(d_k|\hat{d},\rho)const$$
此时,后验估计$p(\hat{d},\rho|d_{r+1},...,d_k) $不再符合高斯$\times$Beta的假设,需要再次用高斯$\times$Beta来近似,具体方法是让二者对$\hat{d}$和$\rho$的一阶矩和二阶矩相等。这样,每一步的后验估计都可以用高斯$\times$Beta描述,经过一系列推导后就可以得到相应的更新公式,具体的推导可以查阅论文[2]的补充材料。不过需要注意的是,补充材料中公式(19)写错了,应该是${1}/{s^2}={1}/{\sigma^2}+{1}/{\tau^2}$。下面贴出REMODE中深度滤波器更新的代码(也可以参考SVO中DepthFilter::updateSeed的代码),比较不理解的是求出c1和c2后的normalization的操作,这是论文[2]的推导中没有的。
1 // REMODE中深度滤波器更新的代码。 2 const float tau_sq = tau * tau; 3 const float s_sq = (tau_sq * sigma_sq) / (tau_sq + sigma_sq); 4 const float m = s_sq * (mu / sigma_sq + depth / tau_sq); 5 float c1 = (a / (a+b)) * normpdf(depth, mu, sigma_sq+tau_sq); 6 float c2 = (b / (a+b)) * (1.0f / dev_ptr->scene.depth_range); 7 const float norm_const = c1 + c2; 8 c1 = c1 / norm_const; 9 c2 = c2 / norm_const; 10 const float f = c1 * ((a + 1.0f) / (a + b + 1.0f)) + c2 *(a / (a + b + 1.0f)); 11 const float e = c1 * (( (a + 1.0f)*(a + 2.0f)) / ((a + b + 1.0f) * (a + b + 2.0f))) + 12 c2 *(a*(a + 1.0f) / ((a + b + 1.0f) * (a + b + 2.0f))); 13 14 if(isnan(c1*m)) 15 { 16 return; 17 } 18 19 const float mu_prime = c1 * m + c2 * mu; 20 dev_ptr->sigma->atXY(x, y) = c1 *(s_sq + m*m) + c2 * (sigma_sq + mu*mu) - mu_prime*mu_prime; 21 dev_ptr->mu->atXY(x, y) = mu_prime; 22 const float a_prime = ( e - f ) / ( f - e/f ); 23 dev_ptr->a->atXY(x, y) = a_prime; 24 dev_ptr->b->atXY(x, y) = a_prime * ( 1.0f-f ) / f;
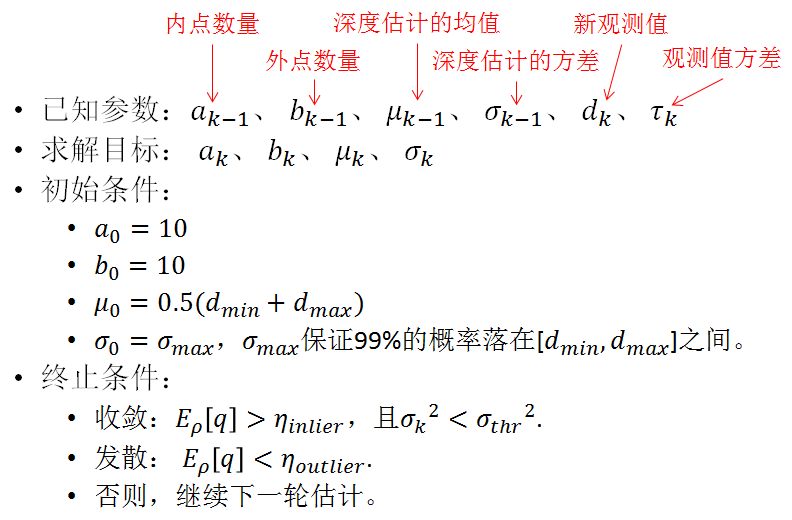
下图图总结了深度滤波器的概况,$E_{\rho}[q]$是内点概率$\rho$的期望值。按照论文[2]的解释,$E_{\rho}[q]={a_k}/{(a_k+b_k)}$。但REMODE实际的代码中在和$\eta_{outlier}$比较时用的是$(a_k-1)/(a_k+b_k-2)$,没太想明白为什么。关于参数的选择,论文[2]中$\eta_{inlier}=0.1$,$\eta_{outlier}=0.05$,$\sigma_{thr}=(Z_{max}-Z_{min})/10000$;REMODE中$\eta_{inlier}=0.7$,$\eta_{outlier}=0.05$,$\sigma_{thr}=(Z_{max}-Z_{min})/1000$。
1 // REMODE中深度滤波器收敛与否的判断 2 // if E(inlier_ratio) > eta_inlier && sigma_sq < epsilon 3 if( ((a / (a + b)) > dev_ptr->eta_inlier) 4 && (sigma_sq < dev_ptr->epsilon) ) 5 { // The seed converged 6 dev_ptr->convergence->atXY(x, y) = ConvergenceStates::CONVERGED; 7 } 8 else if((a-1) / (a + b - 2) < dev_ptr->eta_outlier) 9 { // The seed failed to converge 10 dev_ptr->convergence->atXY(x, y) = ConvergenceStates::DIVERGED; 11 } 12 else 13 { 14 dev_ptr->convergence->atXY(x, y) = ConvergenceStates::UPDATE; 15 }
另一个需要考虑的内容是观测值方差$\tau_k$的估计。REMODE假设图像上的方差是1个像素,反向投影出去得到深度的方差。具体的求解可以参考论文[1],大致的思路是:由于$C_r$、$C_k$、$_rp$三点坐标已知,可以很方便地求出三条边长,然后用余弦定理求出$\alpha$和$\beta$;再估计出$\beta^+$后,可以根据正弦定理求出$_rp^+$,从而根据$\tau_k^2=(||_rp^+||-||_rp||)^2$求出$\tau_k$。在图像不同位置,$\beta^+$的大小是不同的,REMODE中用$\beta+2tan^{-1}(\frac{1}{2f})$来近似。

2. 平滑表面
如前文所说,深度滤波器中每个像素是单独计算的,没有考虑像素之间的约束,所以计算出的深度图比较粗糙。平滑表面的作用就是引入像素之间的约束,一方面去掉毛刺,另一方面又要保留边界。REMODE参照论文[4]构造了如下的正则化损失函数:
$$\min_F\int_{\Omega}\{G(u)||{\bigtriangledown}F(u)||_{\epsilon}+\lambda||F(u)-D(u)||_1\}du,$$
其中,$D$是深度滤波器得到的深度图,$F$是优化的目标。损失函数的第一项是正则化项,让表面尽量平滑,第二项是数据项,保留原始的数据信息,$\lambda$控制这两项的比例大小。正则化项的权重$G$等于:
$$G(u)=E_\rho[q](u)\frac{\sigma^2(u)}{\sigma_{max}^2}+\{1-E_\rho[q](u)\}=1-E_\rho[q](u)\frac{\sigma_{max}^2-\sigma^2(u)}{\sigma_{max}^2},$$
方差$\sigma^2(u)$越小,内点概率$E_\rho[q](u)$越大,深度滤波器的原始数据越可信,正则化项的权重$G(u)$越小,越信任数据项。$||{\bigtriangledown}F(u)||_{\epsilon}$沿用了DTAM的构造方式:
$$ ||{\bigtriangledown}F(u)||_{\epsilon}=\left\{
\begin{aligned}
&\frac{||{\bigtriangledown}F(u)||_2^2}{2\epsilon} && 如果||{\bigtriangledown}F(u)||_2\le\epsilon,\\
&||{\bigtriangledown}F(u)||_1-\frac{\epsilon}{2} && 其他.
\end{aligned}
\right.
$$
这里$||{\bigtriangledown}F(u)||_{\epsilon}$是Huber范数,由L1范数(元素绝对值的和)和L2范数(元素平方和的平方根)组成。对于$||{\bigtriangledown}F(u)||_2$比较小的情况,一般是遇到了光滑的表面,L2范数可以惩罚毛刺;而对于梯度比较大的情况,一般是遇到了不连续的边界,如果仍然用L2范数,正则化项会很大,导致强行平滑了不连续的边界,所以这种情况会换成L1范数。
参考文献:
[1] Pizzoli M, Forster C, Scaramuzza D. REMODE: Probabilistic, monocular dense reconstruction in real time[C]//Robotics and Automation (ICRA), 2014 IEEE International Conference on. IEEE, 2014: 2609-2616.
[2] Vogiatzis G, Hernández C. Video-based, real-time multi-view stereo[J]. Image and Vision Computing, 2011, 29(7): 434-441.
[3] Forster C, Pizzoli M, Scaramuzza D. SVO: Fast semi-direct monocular visual odometry[C]//Robotics and Automation (ICRA), 2014 IEEE International Conference on. IEEE, 2014: 15-22.
[4] Bresson X, Esedoḡlu S, Vandergheynst P, et al. Fast global minimization of the active contour/snake model[J]. Journal of Mathematical Imaging and vision, 2007, 28(2): 151-167.
[5] Newcombe R A, Lovegrove S J, Davison A J. DTAM: Dense tracking and mapping in real-time[C]//Computer Vision (ICCV), 2011 IEEE International Conference on. IEEE, 2011: 2320-2327.
[6] Chambolle A, Pock T. A first-order primal-dual algorithm for convex problems with applications to imaging[J]. Journal of mathematical imaging and vision, 2011, 40(1): 120-145.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号