
OpenCV学习笔记(6)——几何变换
- 对图像进行各种变换,如移动,旋转,仿射变换等
变换
opencv提供了两个变换函数cv2.warpAffine cv2.warpPerspective使用这两个函数你可以实现所有类型的变换。前者接收的参数是2*3的变换矩阵,后者接收的是3*3的变换矩阵
1. 扩展缩放
扩展缩放知识改变图像的尺寸大小。opencv提供的函数cv2.resize()可以实现这个功能。图像的尺寸可以自己手动设置,也可以指定缩放因子。插值方法也有多种选择,缩放时推荐使用cv2.INTER_AREA,扩展时推荐使用cv2.INTER_CUBIC(慢)和cv2.INTER_LINEAR。默认情况下所有改变图像尺寸大小的操作使用的都是cv2.INTER_LINEAR。例程如下:
# -*- coding:utf-8 -*-
import numpy as np
import cv2
img = cv2.imread('2.jpg')
res = cv2.resize(img, None, fx = 0.5, fy = 0.5, interpolation = cv2.INTER_AREA)#设置缩放因子的写法
height,width = img.shape[:2]
res1 = cv2.resize(img,(2*width,2*height),interpolation=cv2.INTER_CUBIC)#直接设置输出图像的尺寸的方式
res2 = cv2.resize(img,(2*width,2*height),interpolation=cv2.INTER_LINEAR)
cv2.imshow('res',res)
cv2.imshow('res1',res1)
cv2.imshow('res2',res2)
cv2.imshow('img',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
注意两种改变尺寸的用法(缩放因子法和设置输出图像尺寸法)
2.平移
平移就是将对象换一个位置。如果要将图像沿(x,y)方向移动,移动距离是(tx,ty),可以按下面的方式构建矩阵:
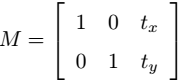
然后将这个矩阵传给cv2.warpAffine()。M矩阵可以用Numpy构建这个矩阵(矩阵类型为np.float32),例程如下:
import numpy as np
import cv2
img = cv2.imread('2.jpg')
M = np.float32([[1,0,100],[0,1,50]])#注意这里必须是这个类型的矩阵
rows,cols = img.shape[:2]#输出顺序是高,宽
res = cv2.warpAffine(img,M,(cols,rows))#这里第三个参数是输出图像的(宽,高)
cv2.imshow('img',img)
cv2.imshow('res',res)
cv2.waitKey(0)
cv2.destroyAllWindows()
3.旋转
对一个图像旋转一个角度,需要用到下面形式 的旋转矩阵
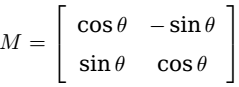
但是opencv 允许你在任意地方进行旋转,只是旋转矩阵需要修改为
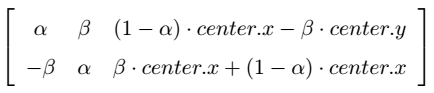
其中
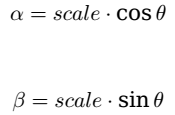
为了构建这个旋转矩阵,opencv提供了一个函数:cv2.getRotationMatrix2D 下面的例子就是在缩放0.5倍的情况下将图像旋转90°:
# -*- coding:utf-8 -*-
import numpy as np
import cv2
img = cv2.imread('2.jpg')
rows,cols = img .shape[:2]
M = cv2.getRotationMatrix2D((cols/2,rows/2),90,0.5)#第一个参数是旋转中心,第二个是旋转角度(逆时针),第三个是缩放因子
#这个方法还可以用来缩放或扩展图片
dst = cv2.warpAffine(img,M,(cols,rows))
cv2.imshow('dst',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
4.仿射变换
在仿射变换中,原图在所有的平行线在输出图像中同样平行。为了创建这个矩阵我们需要从原图像中找到三个点以及他们在输出图像中的位置。然后用cv2.getAffineTransform创建一个2*3的矩阵,最后这个矩阵会被传给cv2.warpAffine。其实就是以坐标轴变化带来图像变换,只是坐标轴怎么变的需要3个点来确定。
例程如下:
import numpy as np
import cv2
img = cv2.imread('2.jpg')
rows,cols = img.shape[:2]
pts1 = np.float32([[50,50],[200,50],[50,200]])
pts2 = np.float32([[10,100],[200,50],[100,250]])
M = cv2.getAffineTransform(pts1,pts2)
dst = cv2.warpAffine(img,M,(cols,rows))
cv2.imshow('img',img)
cv2.imshow('dst',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
结果如下:
 --->
---> 
5.透视变换
对于视角变换,我们需要一个3*3变换矩阵。在变换前后直线还是直线。要构建这个变换矩阵,你需要在输入图像上找4个点,以及他们在输出图像上对应的位置。这四个点钟任意三个都不能共线。这个变换矩阵可以用cv2.gerPerspectiveTransform()构建。然后把这个矩阵传给函数cv2.warpPerspective。
实际效果类似与局部放大的感觉。
例程如下:
# -*- coding:utf-8 -*-
import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('5.jpg')
rows,cols = img.shape[:2]
pts1 = np.float32([[56,65],[368,52],[28,387],[389,390]])
pts2 = np.float32([[0,0],[300,0],[0,300],[300,300]])
M = cv2.getPerspectiveTransform(pts1,pts2)
dst = cv2.warpPerspective(img,M,(300,300))
cv2.imshow('img',img)
cv2.imshow('dst',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
效果如下:
 --->
---> 

 浙公网安备 33010602011771号
浙公网安备 33010602011771号