
二、STM32F103C8T6-定时器
STM32F103C8T6 定时器概述
STM32F103C8T6 作为一款广泛使用的微控制器,内置多个定时器,能够支持多种计时和控制功能,如精确延时、脉冲宽度调制(PWM)、捕获比较(Capture/Compare)、输入捕获 和 输出比较 等。这些功能在电机控制、信号测量、周期性事件触发等应用中非常常用。
STM32F103C8T6 的定时器分类
一、高级定时器(TIM1):高级定时器不仅具有基本的定时和计数功能,还支持高级功能,如死区控制(dead-time generation)、互补输出、刹车功能和自动重装载预加载(ARR preload),这些功能使其特别适合用于复杂的电机控制和电源管理应用。
- 提供增强的功能,特别适合 PWM 控制、电机控制。
- 支持多通道 PWM 输出,具有丰富的捕获/比较功能。
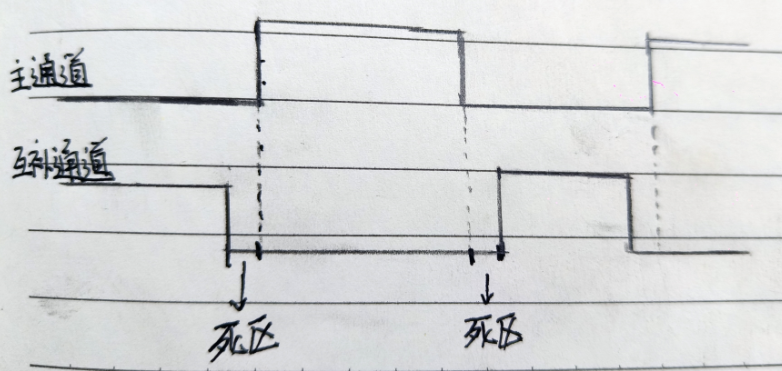
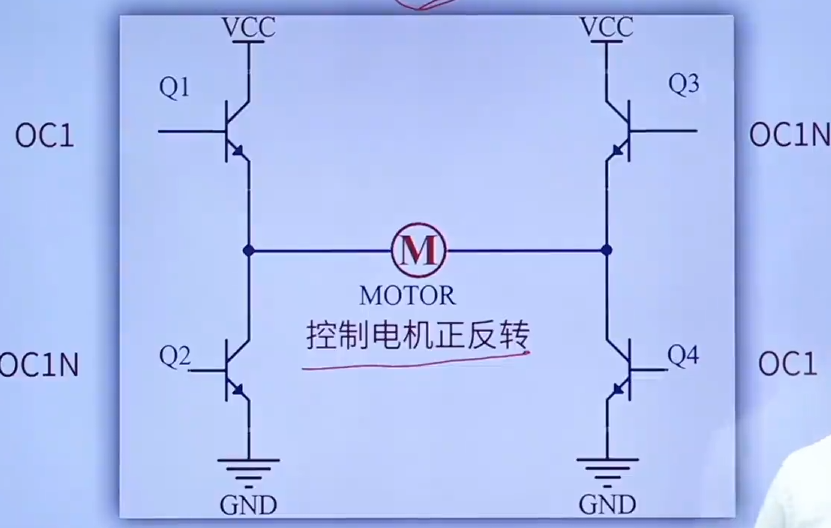
高级定时器互补输出:互补输出是通过定时器的多个输出通道生成一对相反的 PWM 信号,即一个信号为高电平时,另一个信号为低电平。互补输出常用于控制 全桥电路 或 半桥电路,从而驱动 MOSFET 或 IGBT 等开关器件。
互补输出的基本原理:
-
主通道(主输出):高级定时器生成的 PWM 信号,用于驱动负载或开关。
-
互补通道(互补输出):与主通道相反的信号(即互补信号),用于驱动相反极性的开关器件,确保系统中不会同时导通同一条导通路径的两个开关,避免短路。
-
死区时间(Dead Time):为了避免主通道和互补通道的开关在某一瞬间同时导通(造成短路),可以引入死区时间。死区时间是指主通道关闭后,互补通道延迟一定时间才开始导通,反之亦然。这是电机控制和开关电源中非常关键的一项保护功能。
互补输出控制电机正反转例子图:(H桥)
扩展:IGBT与MOSFET对比:

二、通用定时器
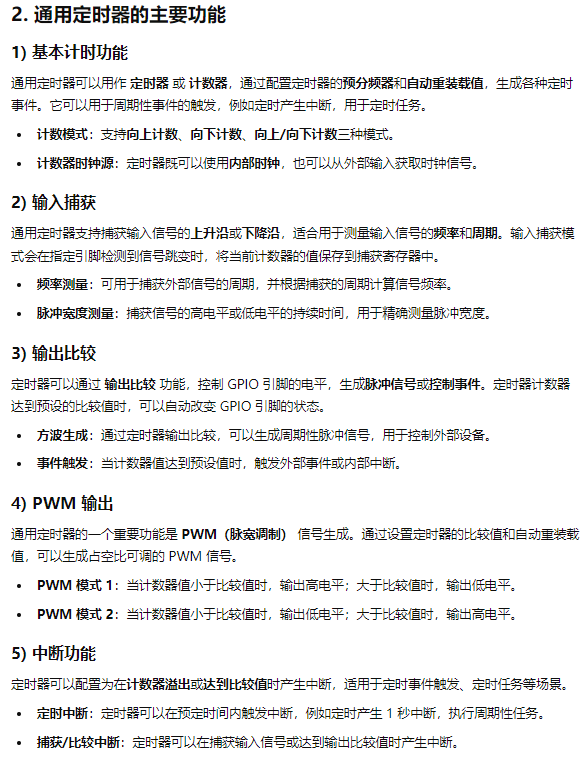
在 STM32F103C8T6 微控制器中,通用定时器提供了丰富的功能,适合于基本计时、输入捕获、输出比较、PWM 输出等多种应用。STM32F103C8T6 配备了多个通用定时器,包括 TIM2、TIM3、TIM4。
- TIM2:32 位通用定时器,支持基本定时、中断、捕获/比较、PWM 输出等功能。
- TIM3、TIM4:16 位通用定时器,支持类似功能,主要区别在于计数器的位宽较小。
应用实例:
1、定时器中断
使用定时器2(TIM2),每隔1秒产生一次中断,时钟频率为72MHZ
void TIM2_Init(void)
{
// 开启 TIM2 时钟
__HAL_RCC_TIM2_CLK_ENABLE();
TIM_HandleTypeDef TimHandle = {0};
TimHandle.Instance = TIM2;
// 预分频器配置,计数频率为 10 kHz
TimHandle.Init.Prescaler = 7200 - 1; // 72 MHz / 7200 = 10 kHz
// 自动重装载值,1 秒定时
TimHandle.Init.Period = 10000 - 1; // 10 kHz / 10000 = 1 秒
TimHandle.Init.CounterMode = TIM_COUNTERMODE_UP;
HAL_TIM_Base_Init(&TimHandle);
// 启用定时器中断
HAL_TIM_Base_Start_IT(&TimHandle);
}
// 定时器中断回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2)
{
// 每 1 秒触发一次中断
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5); // 切换 GPIO 状态
}
}
代码中,TIM2 配置为每秒产生一次中断,计数频率为 10 kHz,周期为 1 秒。每次中断发生时,GPIO 引脚状态发生翻转。
定时器中断回调函数:用于处理定时器产生的中断事件。STM32 使用 HAL 库时,定时器中断发生后,HAL_TIM_PeriodElapsedCallback() 函数会被自动调用,这是一个通用的定时器中断回调函数,负责处理定时器的计时溢出或更新事件。
(参数 htim:传入的 TIM_HandleTypeDef 结构体用于标识是哪一个定时器产生了中断)
2、使用TIM3生成PWM信号
假设我们使用TIM3生成一个1KHZ的PWM信号,占空比50%
void TIM3_PWM_Init(void)
{
// 开启 TIM3 时钟
__HAL_RCC_TIM3_CLK_ENABLE();
TIM_HandleTypeDef TimHandle = {0};
TIM_OC_InitTypeDef sConfigOC = {0}; //输出比较的结构体,任务句柄
// 基本时基配置
TimHandle.Instance = TIM3;
TimHandle.Init.Prescaler = 72 - 1; // 预分频器,计数频率 1 MHz
TimHandle.Init.Period = 1000 - 1; // 自动重装载值,1 kHz PWM 频率
TimHandle.Init.CounterMode = TIM_COUNTERMODE_UP;
HAL_TIM_PWM_Init(&TimHandle); // 初始化 PWM
// 配置 PWM 输出通道
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 500; // 50% 占空比
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
HAL_TIM_PWM_ConfigChannel(&TimHandle, &sConfigOC, TIM_CHANNEL_1);
// 启动 PWM 输出
HAL_TIM_PWM_Start(&TimHandle, TIM_CHANNEL_1);
}
3、使用 TIM4 捕获输入信号
假设我们使用 TIM4 捕获输入信号的上升沿,并测量输入信号的频率。
void TIM4_InputCapture_Init(void)
{
// 开启 TIM4 时钟
__HAL_RCC_TIM4_CLK_ENABLE();
TIM_HandleTypeDef TimHandle = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
// 基本时基配置
TimHandle.Instance = TIM4;
TimHandle.Init.Prescaler = 72 - 1; // 计数频率为 1 MHz
TimHandle.Init.Period = 0xFFFF; // 最大计数值
TimHandle.Init.CounterMode = TIM_COUNTERMODE_UP;
HAL_TIM_IC_Init(&TimHandle);
// 输入捕获配置
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING; //上升沿捕获
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
HAL_TIM_IC_ConfigChannel(&TimHandle, &sConfigIC, TIM_CHANNEL_1);
// 启动输入捕获
HAL_TIM_IC_Start_IT(&TimHandle, TIM_CHANNEL_1);
}
输入捕获,计算输入信号周期
#include "stm32f1xx_hal.h"
// 定义全局变量
uint32_t capture1 = 0;
uint32_t capture2 = 0;
uint32_t difference = 0;
uint32_t frequency = 0;
// 初始化 TIM3 的输入捕获功能
void TIM3_InputCapture_Init(void)
{
__HAL_RCC_TIM3_CLK_ENABLE();
TIM_HandleTypeDef TimHandle = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
TimHandle.Instance = TIM3;
TimHandle.Init.Prescaler = 72 - 1; // 1 MHz 计数频率
TimHandle.Init.Period = 0xFFFF;
TimHandle.Init.CounterMode = TIM_COUNTERMODE_UP;
HAL_TIM_IC_Init(&TimHandle);
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
HAL_TIM_IC_ConfigChannel(&TimHandle, &sConfigIC, TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&TimHandle, TIM_CHANNEL_1);
}
// 定时器输入捕获回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM3 && htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
if (capture1 == 0)
{
capture1 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
}
else
{
capture2 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
if (capture2 > capture1)
{
difference = capture2 - capture1;
}
else
{
difference = (0xFFFF - capture1) + capture2 + 1;
}
frequency = 1000000 / difference;
capture1 = 0;
}
}
}
void TIM3_NVIC_Config(void)
{
HAL_NVIC_SetPriority(TIM3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM3_IRQn);
}
// 主函数
int main(void)
{
HAL_Init();
TIM3_InputCapture_Init();
TIM3_NVIC_Config();
while(1)
{
// 可以在此处监控 frequency 变量
}
}
