运动传感器的应用 -- 自动感应门
项目背景
在生活中自动感应门,通常是感应到人走进时,自动开门。利用运动传感器能感应红外线后,会自动向micro:bit开发板发送高平信号的特性,开发板想自动门的控制舵机发送高平信号,让舵机发生偏移,实现模拟自动门的效果。
编程实践
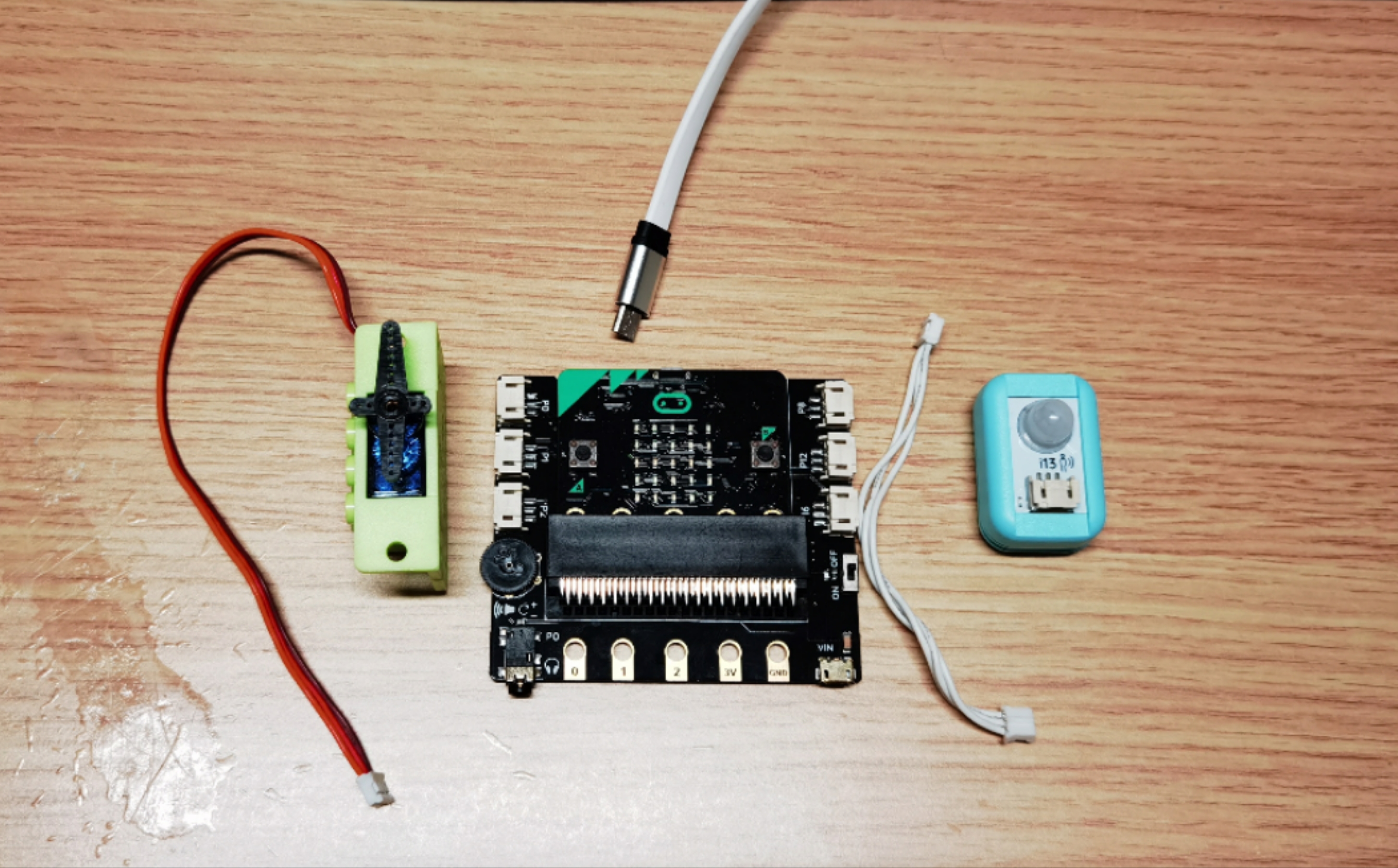
1. 材料准备:1张micro:bit开发板,1张DFROBOT扩展板,1根导线,1个运动传感器,1个金属舵机
2. 添加扩展"舵机"组件
(1)点击"扩展"选项
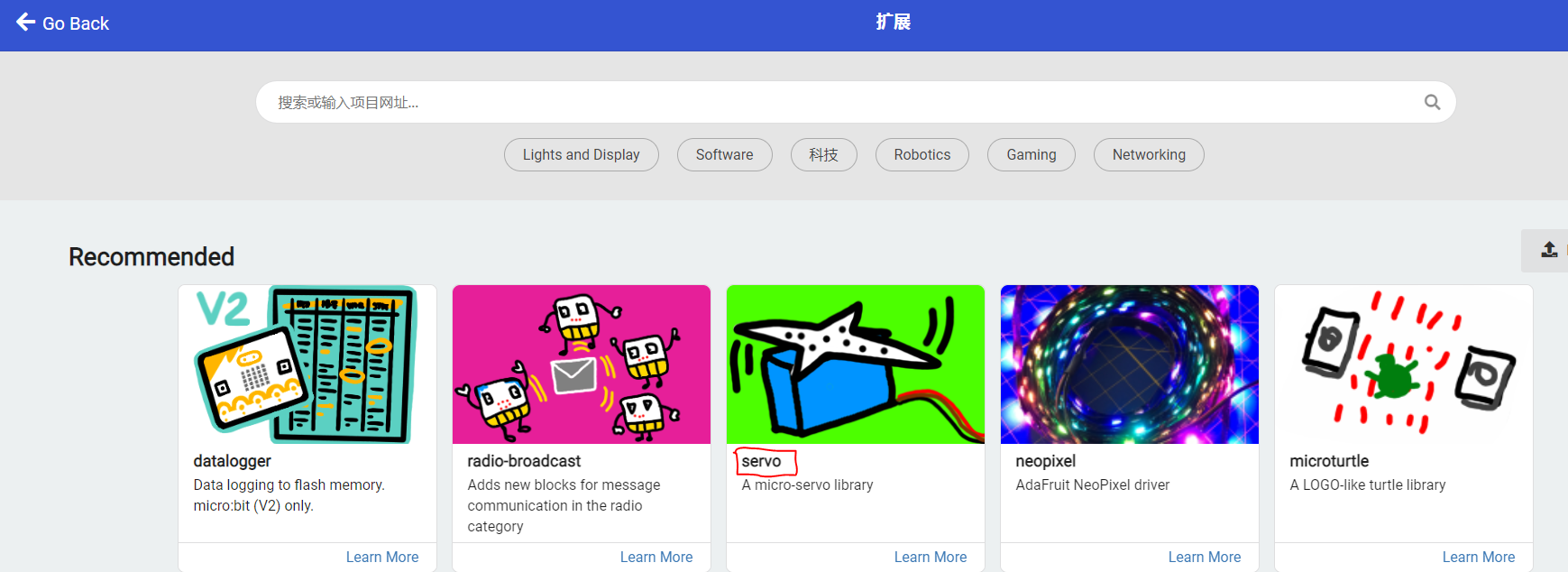
(2)选择"Servo"舵机组件
(3)认识伺服舵机的偏转角度
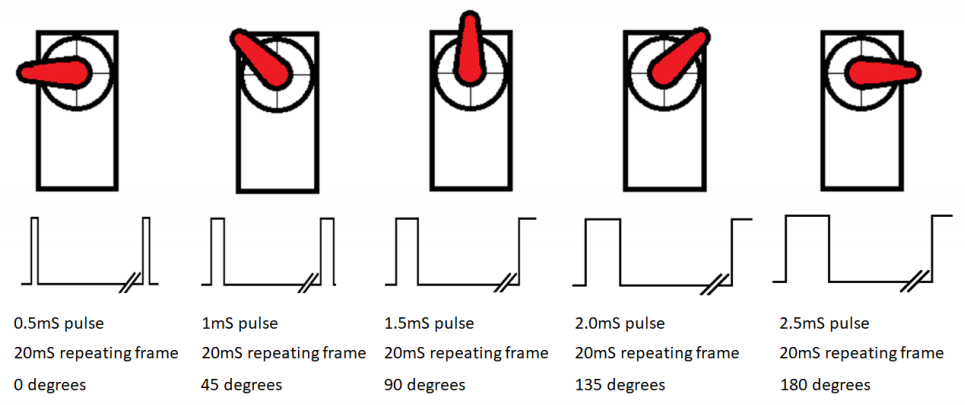
说明:DFROBOT的金属舵机不能旋转360度,建议在0~180度范围进行改变舵机运动范围。
3. 金属舵机外接P0引脚 , 运动传感器外接扩展板的P8引脚,程序代码进行初始化设置
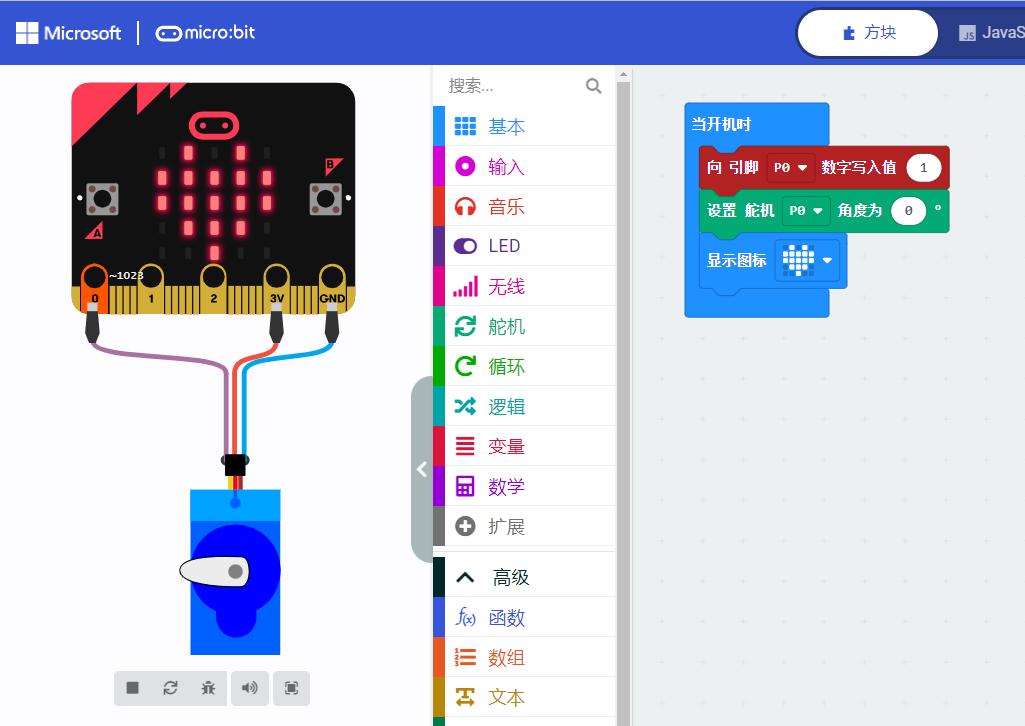
思考:
(1)为什么要给P0引脚输入高平信号1?
(2)舵机初始角度设置多少度合适?
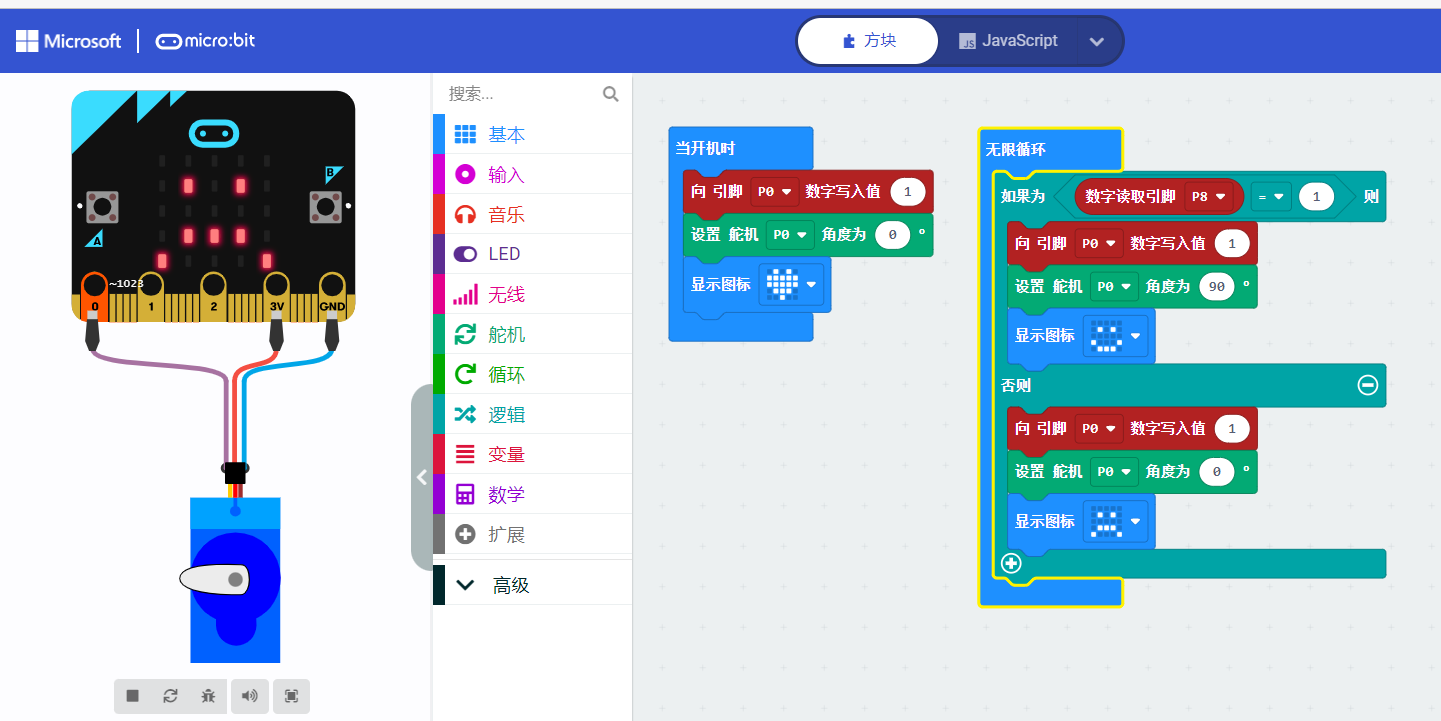
4. 检测到红线外后,LED点阵屏出现笑脸,给P0引脚写入高平信号1,让舵机旋转90度;否则,LED点阵屏显示哭脸,再次给P0引脚写入高平信号1,让舵机恢复旋转0度。
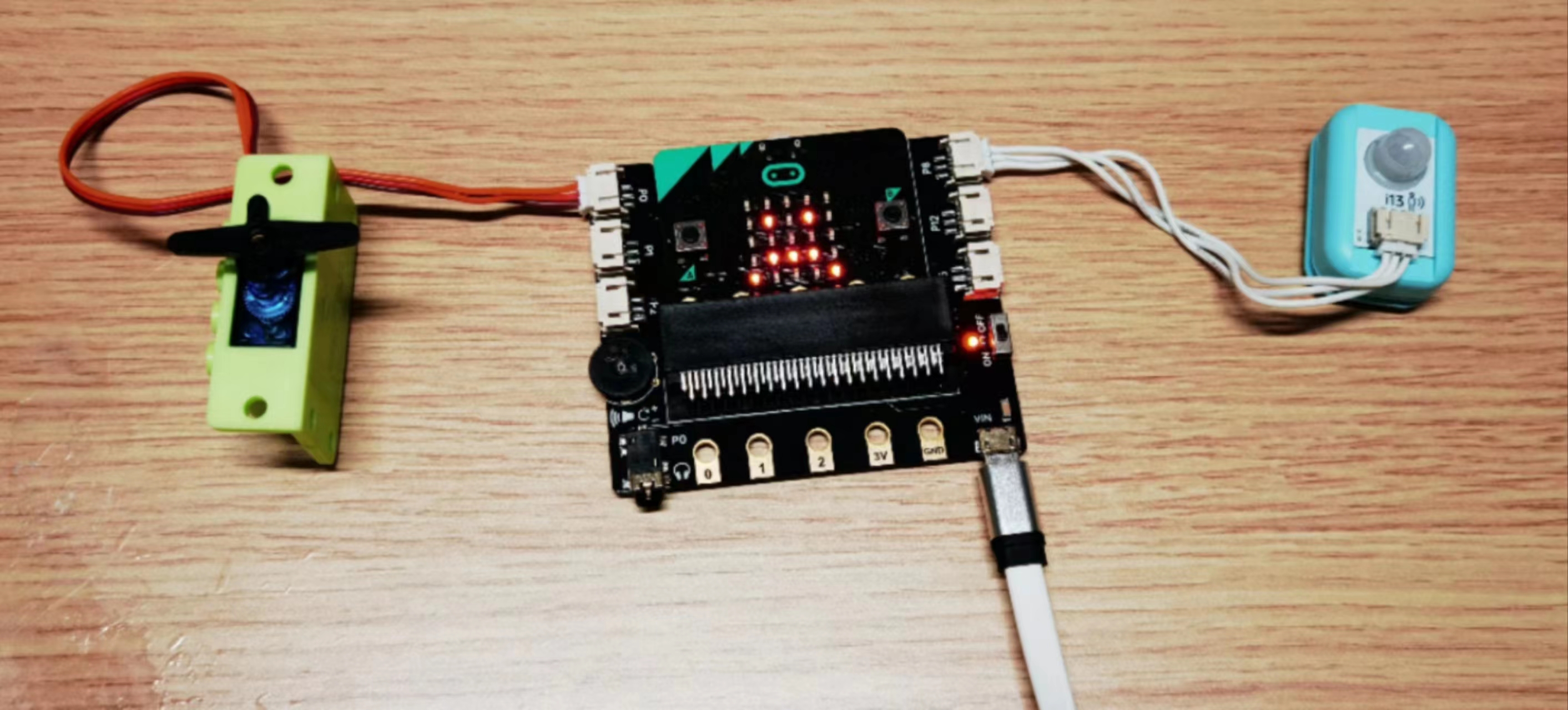
5. 通过USB线下载程序后,要单独给DFROBOT扩展板的外接供电口供电,并且要打开扩展板开关ON,才能驱动金属舵机。
(1)检测到有红外线,舵机指向90度,相当于开门
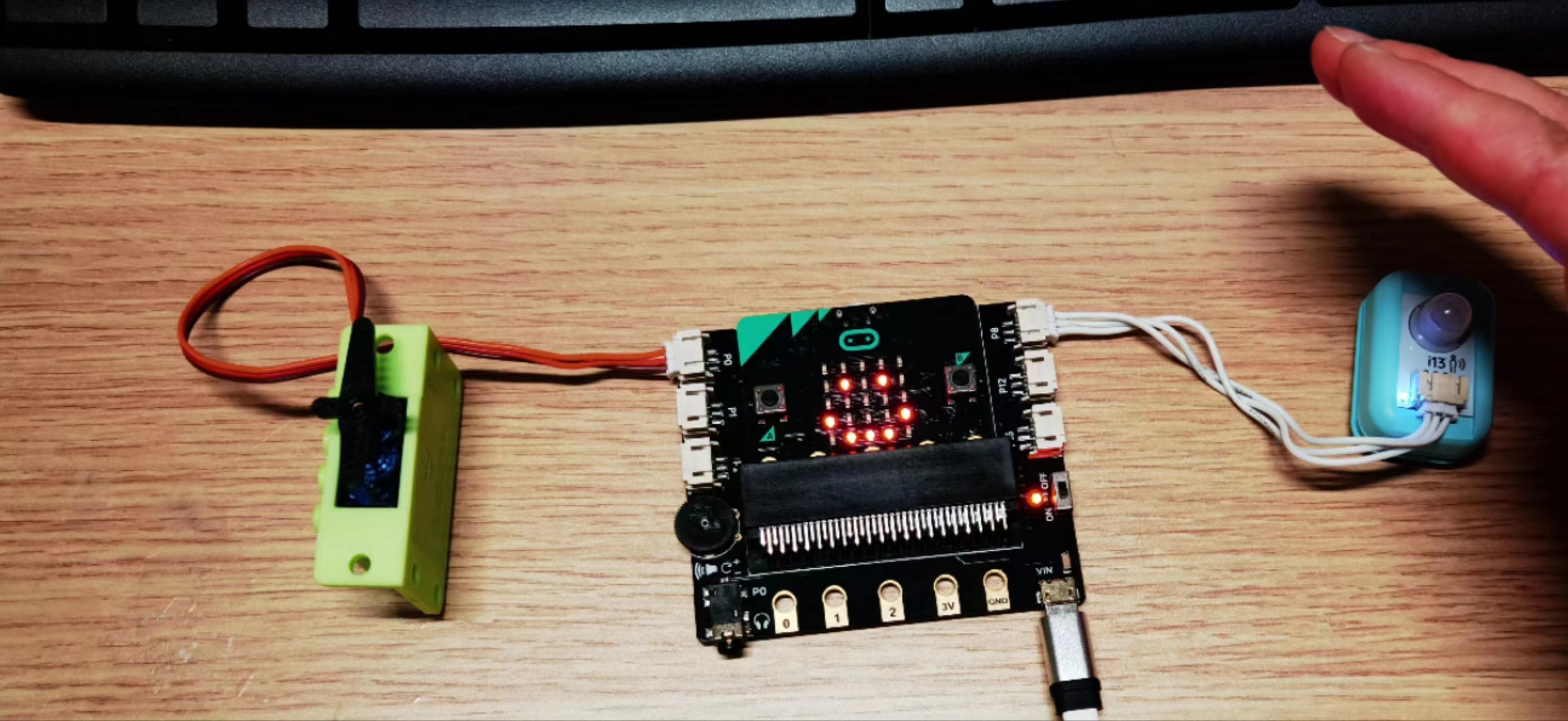
(2)没有检测到红外线,舵机指向0度,相当于关门
思考
(1) 为什么驱动舵机时,都要给P0引脚写入高平电信号1?
(2) 金属舵机的初始方向,可以自己灵活设置吗?
项目分享
https://makecode.microbit.org/_bzd7i6eK4bJr

 浙公网安备 33010602011771号
浙公网安备 33010602011771号